基于注意力机制的飞机轨迹预测方法、储存介质及设备
本专利涉及飞机,特别涉及基于self-attention机制的encoder-decoder模型的轨迹预测的方法的基于注意力机制的飞机轨迹预测方法、介质和设备。
背景技术:
1、随着新一代人工智能技术的发展,飞机已经广泛应用到各个领域。例如,在陆战场环境下,陆地战斗机器和空中战斗机器都会起到重要作用。其中制空权对于战斗的发展以及战斗态势的判断有着重要影响,预判空中飞机的轨迹对于战斗决策的生成有着重要影响。飞机可以实现战斗目标的侦察和打击。因此,飞机技术已经发展为促进社会进步的新引擎和新动能,飞机在复杂的真实场景执行任务过程中,通常在飞行方向和飞行状态方面表现出高度的灵活性和多变性。飞机在农业和装备制造业的大力普及,显著提高了生产效率。此外,飞机在地质勘测和遥感领域也得到广泛应用。在国家应急救援方面,飞机能够为灾害管理和人力救援提供重要保障。特别是,随着飞机高质量发展的迫切需求,确保飞机在空域平稳、安全地飞行,亟需一套完整、高效的飞机飞行轨迹预测方法,为飞机在飞行过程中的和异常行为发现和预警,提供及时可靠的参考依据。
2、综上所述,如何对飞机的飞行状态进行研判,并借助人工智能领域最先进的深度学习方法encoder-decoder网络,实现对飞机飞行过程中的轨迹位置(经度、纬度)进行预测是本文的研究重点。
技术实现思路
1、本发明解决了现有技术中存在的针对长序列轨迹预测精度失准,时间复杂度爆炸,空间内存爆炸的问题。提供了一种基于self-attention机制的编码-解码模型的长时序序列的轨迹预测方法。该模型在时序序列的预测方面有很好的效果,特别是针对长时间序列预测方面,表现出很好的泛化能力,能够有效地解决其他模型,例如rnn或transformer在长序列上会梯度爆炸导致预测结果不理想的问题。
2、本发明的技术方案如下:
3、一种基于注意力机制的飞机轨迹预测方法,包括以下步骤:
4、步骤1:数据采集,收集轨迹数据以及相关的气象数据;
5、步骤2:数据聚类,将采集的轨迹、气象数据处理为连续的轨迹气象时序序列;
6、步骤3:通过嵌入方法,将输入的时序序列转换为特征向量,引入位置编码,用向量来表示输入的时序序列,用位置编码表示序列的时序关系然后输入到encoder-decoder模型中;
7、步骤4:针对时序序列首先输入到encoder中经过self-attention进行加权。自注意力机制是注意力机制的变体,其减少了对外部信息的依赖,更擅长捕捉数据或特征的内部相关性;
8、步骤5:将加权之后数据输入到feed forward neural network,然后输入到decoder;
9、步骤6:将时序序列的同一批的另一部分相同格式数据以及经过encoder编码的数据输入到decoder中进行解码操作;
10、步骤7:最后经过一个全连接层一次输出所有的预测时序序列结果。
11、优选地,所述步骤1包括以下步骤:
12、步骤1.1,利用gps、气象采集等设备进行数据的采集。
13、优选地,所述步骤2包括以下步骤:
14、步骤2.1,将不连续的时序序列处理成连续的时序序列,步骤1中的数据插补、求平均值等方法处理为连续时序序列;
15、步骤2.2,计算气象信息对轨迹点的影响,例如:当前轨迹点有气团等因素,则将轨迹点偏移除气团的半径大小的距离。
16、优选地,所述步骤3包括以下步骤:
17、步骤3.1,针对时序序列的轨迹数据,设计相应的数据读取格式。利用向量嵌入方法将序列数据转换为向量,然后加载到模型中。
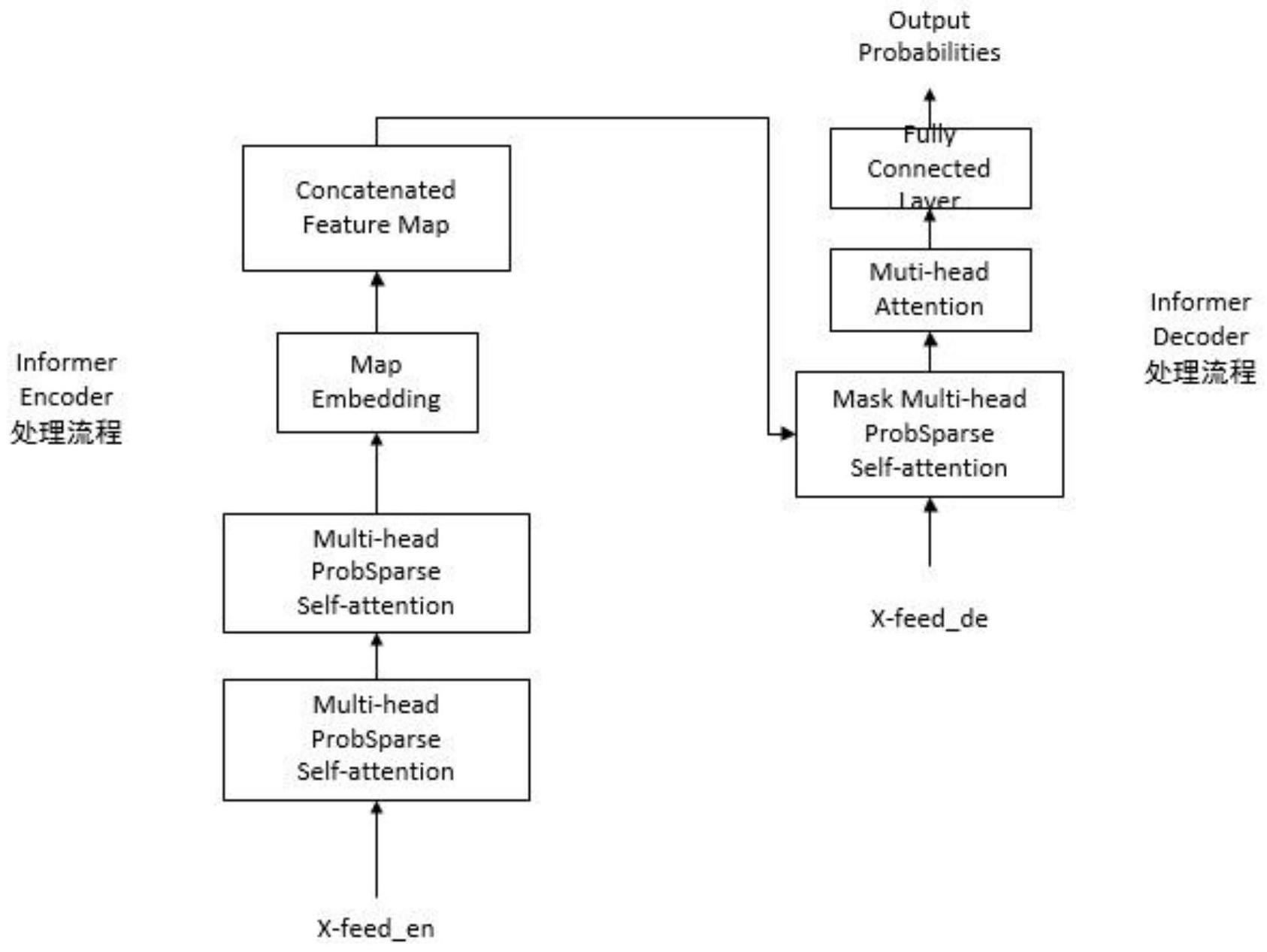
18、步骤3.2,informer网络有encoder-decoder模型组成,encoder模型中由一层self-attention网络和一层feed forward网络组成,feed forward网络由一层relu激活函数和一层线性激活函数组成。decoder模型有self-attention层和encoder-decoderattention层和feed forward层组成。
19、优选地,所述步骤4包括以下步骤:
20、步骤4.1,首先进行conv1d在时间维度上执行以为卷积,后跟随elu激活函数,然后经过maxpool进行最大池化下采样,将输入的长度变为原来的一半。
21、步骤4.2,self-attention会计算出三个新的向量,在本发明中,向量的维度是512维,我们把这三个向量分别称为query、key、value,这三个向量是用embedding向量与一个矩阵相乘得到的结果,这三个值的由来是对于时序序列重点关注的点,本发明中,q是要查询的轨迹信息,k是要查询的向量,v是要查询得到的值,这个矩阵是随机初始化的,维度为(64,512)注意第二个维度需要和embedding的维度一样,其值在bp(选择和抛弃)的过程中会一直进行更新,得到的这三个向量的维度是64低于embedding维度的。根据self-attention得到q,k,v三个向量,为每个向量计算一个score:score=q.k。
22、步骤4.3,对score采用归一化处理即,来保证梯度不发生爆炸。然后用score乘以softmax激活函数。
23、步骤4.4,softmax点乘value值v,得到加权的每个输入向量的评分v,将这些v相加之后得到最终的特征向量z。
24、优选地,所述步骤5包括以下步骤:
25、步骤5.1,先将z输入到relu层,去掉负数,然后输入到一个线性激活函数,提升神经网络的拟合能力来拟合更复杂的函数。
26、优选地,所述步骤6包括以下步骤:
27、步骤6.1,首先输入到self attention中进行解码,得到一个特征向量z,这里的z的算法和encoder中一样。这里的输入有两批,一批是经过encoder处理的,另一批是没有经过的处理的相同格式的时序序列,第一批可以设定为,前十二个轨迹点的相关轨迹信息,第二批是十三到三十的轨迹点信息。然后输入到encoder-decoder attention中,这里的q采用解码器上一个输出,完成进一步解码。然后输入到multi-head probsparse self-attention要进行mask,也是为了避免左向信息流,防止自回归。同时最后要有一个全连接层,全连接层输出的维度取决于要预测的变量维度。
28、优选地,所述步骤7包括以下步骤:
29、步骤7.1,将经过解码后数据,输入到全连接层中,通过线性变化,先将数据映射到高纬度空间,再映射到低纬度空间,完成数据的一次性输出。
30、一种计算机可读存储介质,其上存储有基于注意力机制的飞机轨迹预测程序,该程序被处理器执行时实现所述的基于注意力机制的飞机轨迹预测方法。
31、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时,基于所述的基于注意力机制的飞机轨迹预测方法。
32、本发明提供了一种基于注意力机制的飞机轨迹预测方法,同时记录了本发明的介质和设备。加载历史数据并处理,将数据转换为相应维度的特征向量。考虑到长时序序列的位置依赖问题,对时序序列的轨迹点进行位置编码和时间编码。然后输入到encoder中进行编码操作。encoder由多个encoder-stack块组成。完成编码操作后输入到decoder中进行解码操作。训练直到模型稳定后,将数据输入一个全连接层,然后一次性输出所预测的序列结果。作为时序序列的预测结果。
33、本发明的有益效果如下:本发明考虑到气象原因对轨迹的影响,所以根据气象数据算法,对轨迹加以处理,依照算法调整模型参数。能够更加准确的通过历史轨迹时序序列,预测出未来某个时刻的时序序列。
- 还没有人留言评论。精彩留言会获得点赞!