血管的管腔轮廓的提取方法、装置、电子设备及存储介质与流程
本技术涉及医学图像,尤其是涉及一种血管的管腔轮廓的提取方法、装置、电子设备及存储介质。
背景技术:
1、血管管腔影像主要分为血管内超声(intravascular ultrasound,ivus)和光学相干层析成像(optical coherence tomography,oct)。血管腔内影像(ivus/oct)有着极高的分辨率,可以清楚看到血管的管腔,斑块情况。而获得管腔轮廓,对于血管的管腔直径/面积计算,以及狭窄程度的分析和后续的血管管腔重建,是一个至关重要的前提条件。在腔内影像拍摄术中,快速自动化地获取光滑准确的管腔轮廓,能很大程度缩短手术时间,以及观察术前术后血管管腔情况,减轻医生和患者的负担。
2、目前,针对腔内影像管腔轮廓提取(分割)的方法主要有两类,一类是基于深度学习的方法,首先人工标注大量的管腔数据,然后花大量的时间去获得最后的训练模型,然后直接应用到新的数据上;另一类是通过极坐标转换,然后利用梯度获取血管边界,再连成轮廓。前者的局限性在于需要大量的数据与准确的人工标注,以及大量后续的模型训练时间;后者需要进行极坐标转换,且单纯利用梯度获得的轮廓存在一定的噪声,需要合理的噪声去除方法才能获得准确光滑的轮廓;因此,如何提取血管的管腔轮廓,成为了亟待解决的问题。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种血管的管腔轮廓的提取方法、装置、电子设备及存储介质,能够无需对管腔进行标注,也无需进行极坐标转换,通过对提取的第一个视频帧的当前管腔轮廓进行去噪得到初始管腔轮廓,再对初始管腔轮廓进行优化,得到目标管腔轮廓,将目标管腔轮廓作为下一个视频帧的初始管腔轮廓继续进行优化,从而提取出血管的管腔轮廓,以获得准确光滑的管腔轮廓,提高了血管的管腔轮廓提取的效率以及准确性。
2、本技术主要包括以下几个方面:
3、第一方面,本技术实施例提供了一种血管的管腔轮廓的提取方法,所述提取方法包括:
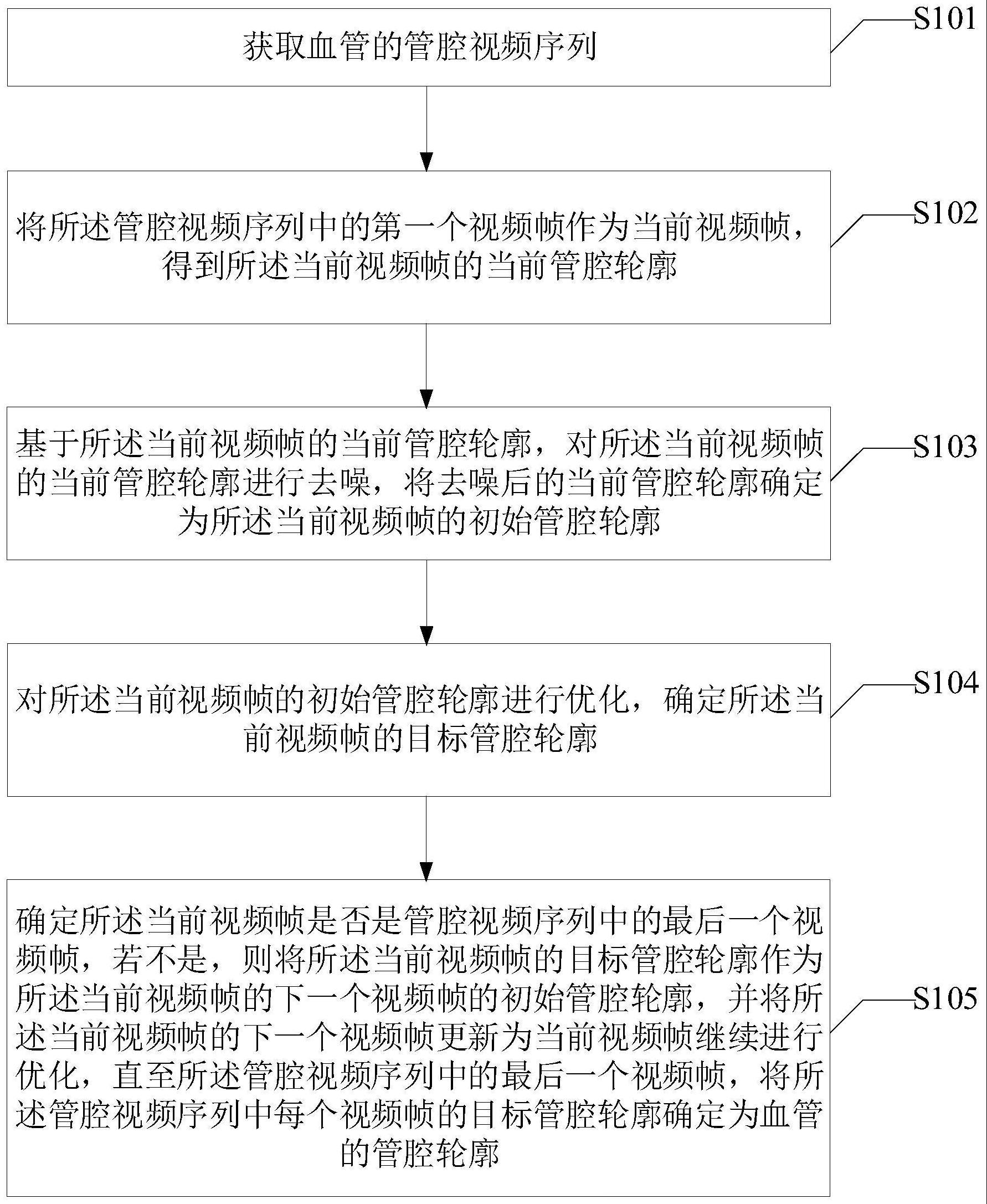
4、获取血管的管腔视频序列;其中,所述管腔视频序列是由沿着血管走向间隔拍摄的多个视频帧组成的序列;
5、将所述管腔视频序列中的第一个视频帧作为当前视频帧,得到所述当前视频帧的当前管腔轮廓;
6、基于所述当前视频帧的当前管腔轮廓,对所述当前视频帧的当前管腔轮廓进行去噪,将去噪后的当前管腔轮廓确定为所述当前视频帧的初始管腔轮廓;
7、对所述当前视频帧的初始管腔轮廓进行优化,确定所述当前视频帧的目标管腔轮廓;
8、确定所述当前视频帧是否是管腔视频序列中的最后一个视频帧,若不是,则将所述当前视频帧的目标管腔轮廓作为所述当前视频帧的下一个视频帧的初始管腔轮廓,并将所述当前视频帧的下一个视频帧更新为当前视频帧继续进行优化,直至所述管腔视频序列中的最后一个视频帧,将所述管腔视频序列中每个视频帧的目标管腔轮廓确定为血管的管腔轮廓。
9、进一步的,所述将所述管腔视频序列中的第一个视频帧作为当前视频帧,得到所述当前视频帧的当前管腔轮廓的步骤,包括:
10、将所述管腔视频序列中的第一个视频帧作为当前视频帧,以所述当前视频帧的中心点为中心,每隔预设度数发射一条射线,得到多条射线;
11、针对每条射线,在所述当前视频帧中确定出该条射线所经过的像素点以及所经过的每个像素点的灰度差;
12、将数值最大的灰度差对应的像素点确定为该条射线的管腔轮廓点;
13、将每条射线的管腔轮廓点依次进行连接,得到所述当前视频帧的当前管腔轮廓。
14、进一步的,所述针对每条射线,在所述当前视频帧中确定出该条射线所经过的像素点以及所经过的每个像素点的灰度差的步骤,包括:
15、针对每条射线,获取该条射线上的采样点,通过欧式距离分别确定所述采样点与所述采样点周围四个像素点的距离;
16、将数值最小的距离对应的像素点确定为该条射线所经过的像素点;
17、将该条射线所经过的像素点按照射线方向依次进行排列,得到像素序列;
18、将所述像素序列通过滑动卷积处理,得到所述像素序列中每个像素点的灰度差。
19、进一步的,所述基于所述当前视频帧的当前管腔轮廓,对所述当前视频帧的当前管腔轮廓进行去噪,将去噪后的当前管腔轮廓确定为所述当前视频帧的初始管腔轮廓的步骤,包括:
20、基于所述当前视频帧的当前管腔轮廓,每间隔预设间隔角度,均在所述当前视频帧的当前管腔轮廓中确定出预设角度的扇形区域;
21、基于所述当前视频帧的当前管腔轮廓中的每个管腔轮廓点,针对每个扇形区域,确定该扇形区域中的每个管腔轮廓点到所述当前视频帧的中心点的距离;
22、基于该扇形区域中的每个管腔轮廓点到所述当前视频帧的中心点的距离,确定该扇形区域的方差;
23、在每个扇形区域的方差中,将数值最大的方差所在的连续的扇形区域确定为目标扇形区域;
24、针对所述目标扇形区域中的每个管腔轮廓点,确定所述目标扇形区域中的每个管腔轮廓点的更新位置;
25、基于所述目标扇形区域中的每个管腔轮廓点的更新位置,更新所述当前管腔轮廓,将更新后的所述当前管腔轮廓确定为所述当前视频帧的初始管腔轮廓。
26、进一步的,所述针对所述目标扇形区域中的每个管腔轮廓点,确定所述目标扇形区域中的每个管腔轮廓点的更新位置的步骤,包括:
27、针对所述目标扇形区域中的每个管腔轮廓点,基于该管腔轮廓点对应的角度、目标扇形区域的最小角度、所述最小角度对应的管腔轮廓点到所述当前视频帧的中心点的距离、目标扇形区域的最大角度以及所述最大角度对应的管腔轮廓点到所述当前视频帧的中心点的距离,确定该管腔轮廓点到所述当前视频帧的中心点的更新距离;
28、基于所述目标扇形区域中的每个管腔轮廓点的更新距离以及所述目标扇形区域中的每个管腔轮廓点的角度,确定所述目标扇形区域中的每个管腔轮廓点的更新位置。
29、进一步的,通过以下步骤对所述当前视频帧的初始管腔轮廓进行优化,确定所述当前视频帧的目标管腔轮廓:
30、基于所述当前视频帧的初始管腔轮廓中每个管腔轮廓点的位置,确定每个管腔轮廓点的当前能量;
31、针对每个管腔轮廓点,将该管腔轮廓点按照预设移动方式进行移动,得到该管腔轮廓点移动后的位置,并基于该管腔轮廓点移动后的位置,重新确定该管腔轮廓点的能量;
32、若重新确定的该管腔轮廓点的能量小于该管腔轮廓点的当前能量,则将重新确定的该管腔轮廓点的能量更新为该管腔轮廓点的当前能量,继续移动该管腔轮廓点,直到确定移动后的该管腔轮廓点的能量不小于该管腔轮廓点的当前能量,得到该管腔轮廓点的目标位置;
33、基于每个管腔轮廓点的目标位置,更新所述当前视频帧的初始管腔轮廓,将更新后的当前视频帧的初始管腔轮廓确定为所述当前视频帧的目标管腔轮廓。
34、第二方面,本技术实施例还提供了一种血管的管腔轮廓的提取装置,所述提取装置包括:
35、获取模块,用于获取血管的管腔视频序列;其中,所述管腔视频序列是由沿着血管走向间隔拍摄的多个视频帧组成的序列;
36、第一提取模块,用于将所述管腔视频序列中的第一个视频帧作为当前视频帧,得到所述当前视频帧的当前管腔轮廓;
37、第二提取模块,用于基于所述当前视频帧的当前管腔轮廓,对所述当前视频帧的当前管腔轮廓进行去噪,将去噪后的当前管腔轮廓确定为所述当前视频帧的初始管腔轮廓;
38、第三提取模块,用于对所述当前视频帧的初始管腔轮廓进行优化,确定所述当前视频帧的目标管腔轮廓;
39、确定模块,用于确定所述当前视频帧是否是管腔视频序列中的最后一个视频帧,若不是,则将所述当前视频帧的目标管腔轮廓作为所述当前视频帧的下一个视频帧的初始管腔轮廓,并将所述当前视频帧的下一个视频帧更新为当前视频帧继续进行优化,直至所述管腔视频序列中的最后一个视频帧,将所述管腔视频序列中每个视频帧的目标管腔轮廓确定为血管的管腔轮廓。
40、进一步的,所述第一提取模块具体用于:
41、将所述管腔视频序列中的第一个视频帧作为当前视频帧,以所述当前视频帧的中心点为中心,每隔预设度数发射一条射线,得到多条射线;
42、针对每条射线,在所述当前视频帧中确定出该条射线所经过的像素点以及所经过的每个像素点的灰度差;
43、将数值最大的灰度差对应的像素点确定为该条射线的管腔轮廓点;
44、将每条射线的管腔轮廓点依次进行连接,得到所述当前视频帧的当前管腔轮廓。
45、第三方面,本技术实施例还提供一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如上述的血管的管腔轮廓的提取方法的步骤。
46、第四方面,本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如上述的血管的管腔轮廓的提取方法的步骤。
47、本技术实施例提供的一种血管的管腔轮廓的提取方法、装置、电子设备及存储介质,所述提取方法包括:获取血管的管腔视频序列;其中,所述管腔视频序列是由沿着血管走向间隔拍摄的多个视频帧组成的序列;将所述管腔视频序列中的第一个视频帧作为当前视频帧,得到所述当前视频帧的当前管腔轮廓;基于所述当前视频帧的当前管腔轮廓,对所述当前视频帧的当前管腔轮廓进行去噪,将去噪后的当前管腔轮廓确定为所述当前视频帧的初始管腔轮廓;对所述当前视频帧的初始管腔轮廓进行优化,确定所述当前视频帧的目标管腔轮廓;确定所述当前视频帧是否是管腔视频序列中的最后一个视频帧,若不是,则将所述当前视频帧的目标管腔轮廓作为所述当前视频帧的下一个视频帧的初始管腔轮廓,并将所述当前视频帧的下一个视频帧更新为当前视频帧继续进行优化,直至所述管腔视频序列中的最后一个视频帧,将所述管腔视频序列中每个视频帧的目标管腔轮廓确定为血管的管腔轮廓。
48、这样,采用本技术提供的技术方案能够无需对管腔进行标注,也无需进行极坐标转换,通过对提取的第一个视频帧的当前管腔轮廓进行去噪得到初始管腔轮廓,再对初始管腔轮廓进行优化,得到目标管腔轮廓,将目标管腔轮廓作为下一个视频帧的初始管腔轮廓继续进行优化,从而提取出血管的管腔轮廓,以获得准确光滑的管腔轮廓,提高了血管的管腔轮廓提取的效率以及准确性。
49、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!