一种弧形区域的目标特征检测方法及检测设备与流程
本技术涉及图像处理,具体涉及图像处理领域中,一种弧形区域的目标特征检测方法及检测设备。
背景技术:
1、随着新能源汽车的普及和推广,用户对于汽车的品质和要求不断提高,锂电池作为新能源汽车的重要部件,在安全和续航等多方面起着重要作用。随着机器视觉技术的高速发展,检测的智能化和无人化已经成为很多自动化生产线和工厂追求的目标。汽车用锂电池在生产的过程中,一些微小的缺陷就可能会影响整个锂电池的性能与质量,因此锂电池生产过程中的质量把控尤为关键。
2、锂电池密封钉焊接后,需要对密封钉圆环状区域的焊缝质量进行检测,传统的检测方法一般为人工目检或者手动触检的方式进行。该方法无法做到完全统一的标准,检测时间和成本也较高,在检测过程中,会因为视觉疲劳而导致误检测,同时人手触摸进行检测也容易将手上的污渍留在密封钉表面,可能增加其被腐蚀的风险。同时,随着工艺要求的提高,需要检测更小的缺陷,如0.1mm以下的凹坑、焊爆等。这些缺陷无法依靠人工目检或者手动触检的方式进行检测。因此,如何降低误检率、提升检测效率和提升缺陷的检测能力成为了当前密封钉生产工艺过程中亟待解决的技术问题。
3、利用人工眼睛和/或手感进行对密封钉圆环状区域的焊缝质量进行检测,往往检测出错率较高,且不同的人对缺陷认知不同,使得检测结果可能会出现偏差的问题。当前,越来越多通过2d或3d的相机拍摄图像信息,基于图像的信息进行缺陷检测。其中,通过2d相机拍摄的图像信息的缺陷检测,是基于纹理信息进行缺陷检测,该方法无法获得缺陷的高度差信息。为了提升检测能力,开始采用3d相机获得物体的形貌信息,进行缺陷的检测,该方法仅仅利用了物体的形貌信息,没有利用物体的纹理信息。如果采用3d的高度图像,主要是通过点云的信息进行平面拟合,计算密封钉的检测区域内的点到拟合的平面的距离,若点到平面的距离大于一定阈值,则视为候选缺陷区域,对候选缺陷区域进行连通性分析,通过圆度、面积、针状度、长、宽等信息进行筛选,获得最终的缺陷区域。该方法对于噪声的敏感性较强,仅仅考虑了形貌的局部信息,没有考虑周边的高度信息进行综合的判断和分析,因此存在较高的误检率和漏检率。
技术实现思路
1、本技术提供一种弧形区域的目标特征检测方法及检测设备,具有对弧形区域的目标特征进行检测时,误检率和漏检率低的特点。
2、根据第一方面,一种实施例中提供一种弧形区域的目标特征检测方法,包括,
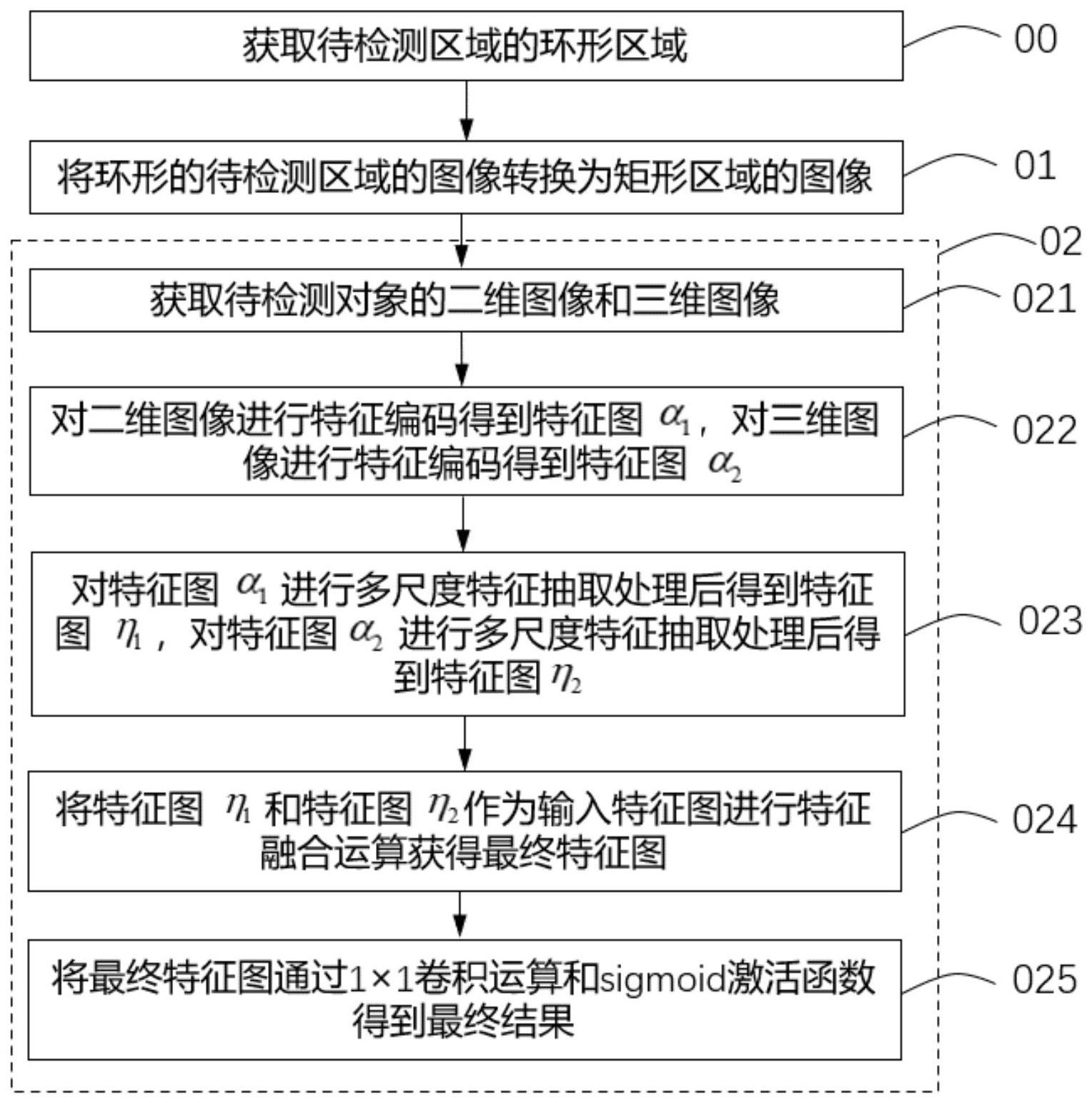
3、获取作为待检测区域的弧形区域;
4、将弧形的待检测区域的图像转换为矩形区域的图像;以及,
5、基于矩形区域的图像进行目标特征检测;
6、所述基于矩形区域的图像进行目标特征检测,包括:
7、获取待检测对象的二维图像和三维图像,所述二维图像包括待检测图像的包含有灰度信息的纹理信息,所述三维图像包括待检测图像的包含有高度信息的形貌信息;
8、对二维图像进行特征编码得到特征图α1,对三维图像进行特征编码得到特征图α2;
9、对特征图α1进行多尺度特征抽取处理后得到特征图η1,对特征图α2进行多尺度特征抽取处理后得到特征图η2;
10、将特征图η1和特征图η2作为输入特征图进行特征融合运算获得最终特征图;以及,
11、将最终特征图通过1×1卷积运算和s igmoid激活函数得到最终结果。
12、一个实施例中,基于矩形区域的图像进行目标特征检测,还包括:
13、对特征图η1和特征图η2进行位置增强编码,位置增强编码公式可表示为:
14、
15、其中,x、y分别为与x轴和y轴平行的坐标信息,d指的是特征图的通道数量,p为特征图η1的通道索引信息,q为特征图η2的通道索引信息;根据该公式依次对特征图η1和特征图η2进行位置增强编码获得与输入特征图等大、通道数量相同的特征图γ;
16、将特征图η1与特征图γ进行通道相加运算后获得特征图μ1,将特征图η2与特征图γ进行通道相加运算后获得特征图μ2;
17、将特征图μ1和特征图μ2作为输入特征图进行特征融合运算获得最终特征图。
18、一个实施例中,所述特征编码包括:
19、获取输入的图像,所述输入的图像为所述二维图像或三维图像;
20、将输入的图像经过两次卷积运算和非线性激活运算后获得第一特征图;
21、将第一特征图经过不同尺度的池化运算形成不同尺度的m个第二特征图,其中m为尺度的数量;
22、将m个第二特征图分别进行卷积和上采样后,得到m个与第一特征图等大小的第三特征图;
23、将所有的m个第三特征图与第一特征图进行通道拼接处理后,得到多尺度的融合特征图;
24、将多尺度的融合特征图进行卷积运算后获得新的第一特征图;
25、将新的第一特征图重复若干次上述经不同尺度的池化运算到得到新的第一特征图的过程完成特征编码。
26、一个实施例中,将输入特征图进行特征融合运算获得最终特征图,包括:
27、将输入特征图进行通道拼接后,进行1×1卷积运算,得到第一融合特征图;
28、将第一融合特征图进行通道划分,平均划分为4份,分别表示为i1、i2、i3、i4,其中,i1直接输出为特征图j1,j1和i2道拼接后进行3×3卷积运算后输出为特征图j2,j2和i3通道拼接后进行3×3卷积运算后输出为特征图j3,j3和i4通道拼接后进行3×3卷积运算后输出为特征图j4,将j1、j2、j3、j4进行通道拼接后,再进行1×1卷积运算,获得第二融合特征图;
29、将第二融合特征图与输入特征图进行相加运算后,获得第三融合特征图;
30、将第三融合特征图作为输入,重复若干次上述将第一特征图进行通道划分再得到第三融合特征图的过程,获得最终的特征图。
31、一个实施例中,获取的待检测对象的待检测图像为纹理图像或形貌图像,包括:获取由视觉传感器输出的包含有待检测对象的二维图像和三维图像。
32、一个实施例中,所述弧形区域为环形区域或环形区域的一部分。
33、一个实施例中,将弧形的待检测区域的图像转换为矩形区域的图像包括:
34、获取弧形待检测区域的同心圆弧的圆心坐标、内圆弧所在内圆半径和外圆弧所在外圆的半径;
35、根据预先设定的半径步长和角度步长,对弧形待检测区域进行区域划分,得到连续的扇形子区域;
36、将扇形子区域相对于同心圆弧圆心的极坐标转换为直角二维坐标系中的坐标,并将扇形子区域转换为直角二维坐标系中对应坐标位置处的矩形子区域;
37、根据扇形子区域的各像素的灰度值及图像插值生成矩形子区域的图像;
38、将与所有扇形子区域一一对应的矩形子区域的图像组成为矩形区域的图像。
39、一个实施例中,所述角度步长为:
40、
41、其中,l为预设的离散化后的距离精度,r1和r2分别为内圆和外圆的半径。
42、一个实施例中,根据扇形子区域的各像素的灰度值及图像插值生成矩形子区域的图像包括:
43、获取待生成的矩形子区域的像素点的离散化半径dk和离散化角度θk;其中,k为像素点的序号;
44、基于所述同心圆弧的圆心坐标(x0,y0)、离散化半径dk和离散化角度θk,获取所述像素点在扇形子区域中的坐标(rk,ck):
45、rk=x0-dk sinθk,ck=y0+dk cosθk
46、根据扇形子区域中对应位置邻域范围内的灰度值和坐标进行最近邻或者双线性或者双三次插值,获得矩形子区域的图像。
47、根据第二方面,一种实施例中提供一种检测设备,包括:
48、视觉传感器11,用于获取包含有待检测对象的二维图像和三维图像并输出,所述二维图像包括待检测图像的包含有灰度信息的纹理信息,三维图像包括待检测图像的包含有高度信息的形貌信息;
49、存储器12,用于存储程序;
50、处理器13,用于通过执行所述存储器存储的程序以实现上述任意一项方法,所述待检测图像为纹理图像或形貌图像。
51、根据第三方面,一种实施例中提供一种计算机可读存储介质,所述介质上存储有程序,所述程序能够被处理器执行以实现上述任一项所述的方法。
52、在弧形区域的目标特征检测方法中,由于将弧形的待检测区域的图像转换为矩形区域的图像,从而可以降低误检测和漏检率,由于基于获取的包含有灰度信息的纹理信息的二维图像和包含有高度信息的形貌信息的三维图像,进行特征编码抽取,从而既考虑了纹理信息,又考虑了形貌信息,且在缺陷检测时考虑了周边的高度信息进行综合的判断和分析,降低了误检和漏检率。
- 还没有人留言评论。精彩留言会获得点赞!