高精地图数据存储介质及高精地图自动化生成方法与流程
本发明属于自动驾驶领域,具体涉及高精地图数据存储介质及高精地图自动化生成方法。
背景技术:
1、随着自动驾驶的高速发展,高精度地图在自动驾驶中的应用日益凸显。越来越多的车厂,将高精地图纳入自动驾驶发展中重要的一环。但当前传统图商生产高精度地图的问题随之显现,传统高精度地图生产采用集中采集模式,需建立搭载专业采集设备(如:激光点云、毫米波雷达、摄像头、惯导等)的采集车队进行采集后回传数据,经过点云预处理、图像识别、人工制图、数据发布等流程来形成高精度地图。整个数据制作流程周期长、人工成本高。依据当前建图程序,高精地图制作周期只能实现季度更新。高精地图产出质量上,虽精度高,但鲜度低,无法满足自动驾驶高鲜度的需求。
2、公开号为cn110083668a的专利,公开了一种高精度地图的数据管理系统、管理方法、终端和存储介质,主要将场景地图划分成若干局部地图,通过坐标转换关系实现局部地图精准拼接,实现室内多层、跨层、地下、地下多层高精度地图数据的有序管理和分类。再根据终端定位位置加载终端附近的局部地图以及局部地图中包含的交通标识信息、交通规则信息,降低终端加载量和计算量。该制图方法可以支持行泊一体应用,但是未解决数据需要大量人工处理,人工成本高的问题。
3、公开号为cn114490910a的专利公开了一种地图的生成方法、装置、电子设备及存储介质。该方法应用于制图平台,包括:获取目标自动驾驶车辆采集的车端采集数据;根据所述目标自动驾驶车辆的目标硬件设备信息,对车端采集数据进行标准化处理,得到制图平台可识别的标准化采集数据;根据标准化采集数据,生成运营地图。通过该技术方案,可实现将制图平台与采集车辆解耦,降低数据采集成本,但是标准化处理依旧参考常规高精地图处理,无法实现自动化生产高精度地图,减少人工制图成本的目的。
技术实现思路
1、本发明公开的高精地图数据存储介质,简化了数据生产过程中的数据存储模型,可以自动化生产高精地图数据,在满足自动驾驶应用的同时,提升了数据生产效率,从而降低了数据生产成本,提升了数据鲜度。
2、本发明还公开了高精地图自动化生成方法,简化了数据生产过程中的数据存储模型,可以自动化生产高精地图数据,在满足自动驾驶应用的同时,提升了数据生产效率,从而降低了数据生产成本,提升了数据鲜度。
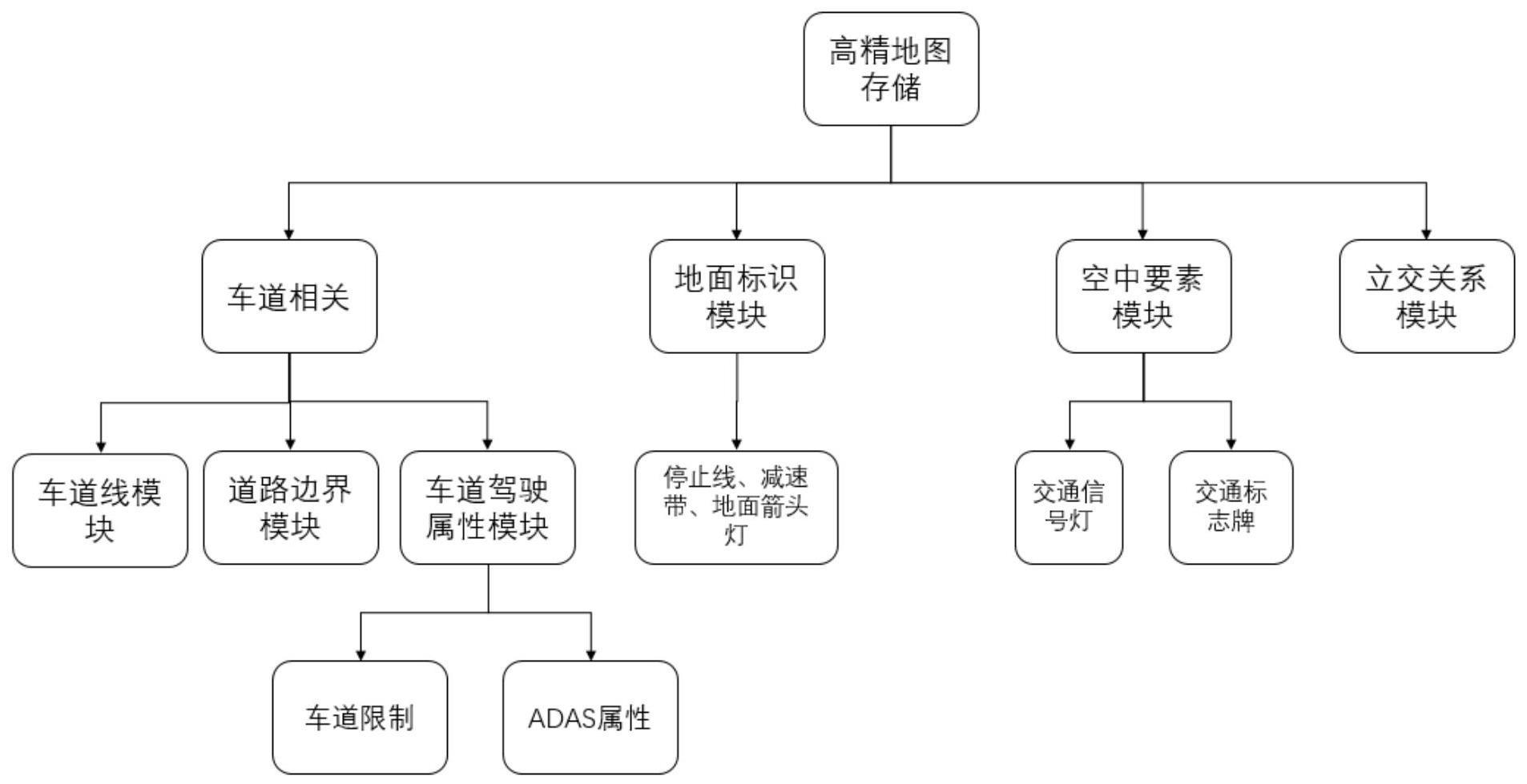
3、本发明公开的高精地图数据存储介质,包括车道线模块,所述车道线模块存储有实现横向控车功能需要的本车道中心线信息,本车车道边界信息,本车车道中心线与其他车道中心线、本车道中心线与车道边界横向左右关联关系信息,所述车道线模块数据被用于下发车端,配合实现车辆横向控制功能。
4、进一步地,还包括道路边界模块,所述道路边界模块含有道路边界信息,车道线模块存储有本车道中心线与道路边界横向左右关联关系信息。
5、进一步地,所述本车道中心线信息含有本车车道中心线标识、本车车道中心线与其他车道中心线横向关联关系由本车车道中心线标识与左侧和/或右侧车道中心线标识关联、本车道中心线与车道边界横向关联关系由本车道中心线标识与左侧和/或右侧车道分界线标识关联、本车道中心线与道路边界横向左右关联关系由本车车道中心线与左侧和/右侧道路边界标识关联。
6、进一步地,车道中心线由感知识别的两侧车道线自动推导生成后,无车道线场景,根据车道中心线节点通过车辆轨迹自动化判断点点连接自动形成。
7、进一步地,道路边界模块还至少包括护栏、路缘石、铺设边缘道路边界数据之一。
8、进一步地,还至少包括空中要素模块、地面标识模块、车道驾驶属性模块和立交关系模块之一。
9、所述空中要素模块包括交通信号灯、交通标牌信息等。
10、所述地面标识模块包括地面行人及车辆行驶提示信息等。
11、所述车道驾驶属性模块包括本车道驾驶限制方向信息、限制时间信息及驾驶坡度曲率信息。
12、所述立交关系模块包括立交点信息及立交层级信息。
13、所述车道线模块通过本车道中心线与空中要素模块、地面标识模块、车道驾驶属性模块、立交关系模块中对应路段信息关联。
14、进一步地,所述车道驾驶属性模块由车道线模块、道路边界模块、空中要素模块、地面标识模块的数据进行adas属性及车道限制属性计算获得;
15、所述立交关系模块由车道线模块、道路边界模块、空中要素模块、地面标识模块的数据进行立交关系属性计算获得。
16、本发明还公开了高精地图数据自动生成方法,包括以下步骤,
17、步骤1)车道中心线由感知识别的两侧车道线自动生成断续车道中心线,根据轨迹,点点纵向连通断续的车道中心线。
18、步骤2)建立车道线模块之间、车道线模块与道路边界模块关联关系,所述车道线模块存储有实现横向控车功能需要的本车道中心线信息,本车车道中心线与其他车道中心线横向关联关系信息,本车道中心线与车道边界横向关联关系信息,本车道中心线与道路边界横向关联关系信息,所述车道线模块数据被用于下发车端,配合实现车辆横向控制功能;
19、步骤3)建立车道线模块与空中要素模块、地面标识模块关联关系;所述车道线模块通过本车道中心线与所述空中要素模块、所述地面标识模块中对应路段信息关联;
20、所述空中要素模块至少包括交通信号灯、交通标牌信息之一;
21、所述地面标识模块包括地面行人及车辆行驶提示信息。
22、进一步地,还包括步骤4),
23、步骤4)建立车道线模块与车道驾驶属性模块、立交关系模块关联关系;
24、所述车道驾驶属性模块由车道线模块、道路边界模块、空中要素模块、地面标识模块的数据进行adas属性及车道限制属性计算获得;
25、所述立交关系模块由车道线模块、道路边界模块、空中要素模块、地面标识模块的数据进行立交关系属性计算获得;
26、所述立交关系模块包括立交点及立交层级信息;所述车道驾驶属性模块包括本车道驾驶限制方向、限制时间信息及驾驶坡度信息;
27、所述车道线模块通过本车道中心线与车道驾驶属性模块、立交关系模块中对应路段信息关联。
28、进一步地,根据车端感知识别的车道线、道路边界自动生成断续车道中心线,根据车端上传车辆轨迹,点点纵向连通断续的车道中心线。
29、进一步地,
30、步骤1)之前包括以下步骤,
31、车端实时感知识别车道及建图相关信息,结合车辆姿态、组合惯导信息,在车端建图形成局部语义地图并将其上传云端;
32、步骤4之后包括以下步骤,
33、建设高精地图数据质检库,自动化逻辑检查高精地图数据;将通过质检高精地图数据通过数据编译、合规性处理后下发车端。
34、本发明有益技术效果为;本发明公开的高精地图数据存储介质及高精地图数据自动生成方法,不进行人工平行打断成组,以自动驾驶表达通行的主要要素-车道中心线要素为基础,组织整个高精地图数据存储,通过记录车道中心线和车道中心线、车道中心线与车道边界,车道中心线和道路边界的横向左右关系,实现横向控车等功能。该横向关联关系可基于空间匹配算法,进行全自动化计算,无需人工参与,减少了人工成本,提升了数据生产效率,缩减了数据生产周期,提升了数据鲜度。
- 还没有人留言评论。精彩留言会获得点赞!