一种车道线匹配方法及装置与流程
本技术涉及自动驾驶,尤其是涉及一种车道线匹配方法及装置。
背景技术:
1、目前,为了保证车辆能够准确定位到高精度地图上,可基于车道线与地图匹配的多传感器融合定位方法,获取车道线的识别结果以对车辆进行定位。
2、但是,因车辆在移动,不同时刻或者不同空间获取的视频画面中出现的车道线难以确定是否为同一车道线,不利于后期数据的融合。采用现有的车道线匹配方法需要先确定拍摄的车道线点及与之对应的地图车道线点,获得车道线点在地图车道线对应点的匹配关系后,再通过点对匹配的方式确定同一时刻不同坐标系下对同一车道线的观测之间的匹配,计算量大,匹配速度慢。
3、针对上述中的相关技术,发明人发现现有的车道线匹配方式存在有匹配速度慢的问题。
技术实现思路
1、为了提升车道线的匹配速度,本技术提供了一种车道线匹配方法及装置。
2、第一方面,本技术提供一种车道线匹配方法。
3、本技术是通过以下技术方案得以实现的:
4、一种车道线匹配方法,包括以下步骤,
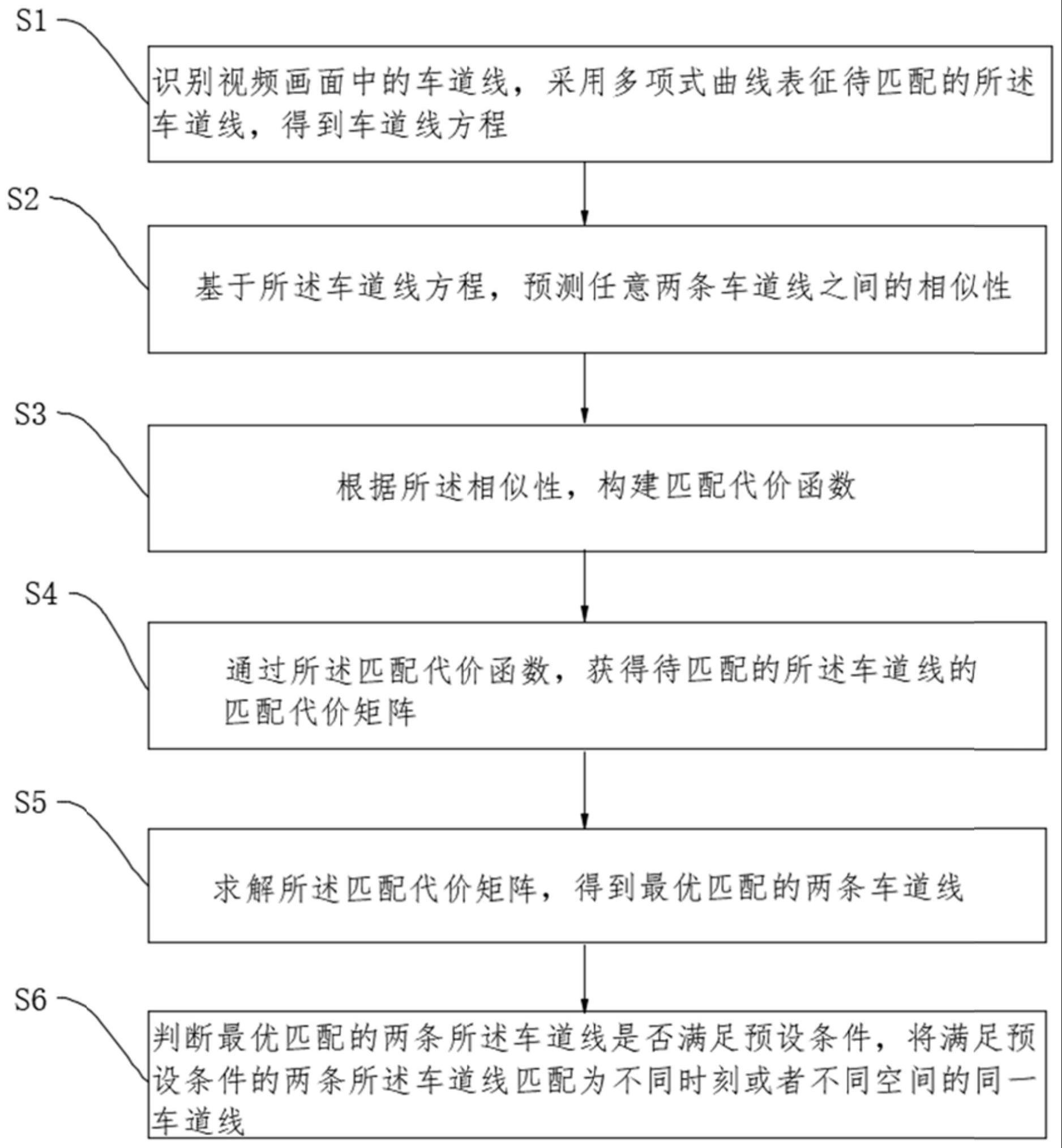
5、识别视频画面中的车道线,采用多项式曲线表征待匹配的所述车道线,得到车道线方程;
6、基于所述车道线方程,预测任意两条车道线之间的相似性;
7、根据所述相似性,构建匹配代价函数;
8、通过所述匹配代价函数,获得待匹配的所述车道线的匹配代价矩阵;
9、求解所述匹配代价矩阵,得到最优匹配的两条车道线;
10、判断最优匹配的两条所述车道线是否满足预设条件,将满足预设条件的两条所述车道线匹配为不同时刻或者不同空间的同一车道线。
11、本技术在一较佳示例中可以进一步配置为:基于所述车道线方程,预测任意两条车道线之间的相似性的步骤包括,
12、基于所述车道线方程,计算两条车道线的差值函数;
13、基于所述差值函数,计算两条车道线的平均宽度;
14、基于所述平均宽度,结合所述差值函数,计算两条车道线的归一化损失;
15、预设等级阈值,将所述归一化损失与所述等级阈值进行比较,确定两条车道线之间的平行相似性等级。
16、本技术在一较佳示例中可以进一步配置为:通过所述匹配代价函数,获得待匹配的所述车道线的匹配代价矩阵的步骤包括,
17、基于所述匹配代价函数,获得两条车道线的匹配代价;
18、预设代价阈值和初始化匹配代价矩阵,将所述匹配代价与所述代价阈值进行比较;
19、若所述匹配代价小于或等于所述代价阈值,则将所述匹配代价存储至所述匹配代价矩阵中;
20、若所述匹配代价大于所述代价阈值,则将所述匹配代价统一重置为新元素再存储至所述匹配代价矩阵中,所述新元素区别于所述匹配代价矩阵存储的其他所有元素。
21、本技术在一较佳示例中可以进一步配置为:求解所述匹配代价矩阵,得到最优匹配的两条车道线的步骤包括,
22、采用km算法求解所述匹配代价矩阵,得到两条车道线的总匹配代价;
23、将最小的总匹配代价对应的两条车道线作为最优匹配的两条车道线。
24、本技术在一较佳示例中可以进一步配置为:所述判断最优匹配的两条所述车道线是否满足预设条件,将满足预设条件的两条所述车道线匹配为不同时刻或者不同空间的同一车道线的步骤包括,
25、预设理想阈值,比较最优匹配的两条车道线对应的所述总匹配代价与所述理想阈值的大小关系;
26、若最优匹配的两条车道线对应的所述总匹配代价小于或等于所述理想阈值,则将两条所述车道线匹配为不同时刻或者不同空间的同一车道线;
27、若最优匹配的两条车道线对应的所述总匹配代价大于所述理想阈值,则默认匹配失败。
28、本技术在一较佳示例中可以进一步配置为:所述平均宽度的表达式包括,
29、
30、a=max(l1.start,l2.start)
31、b=max(min(l1.end,l2.end),a+5)
32、式中,w表示任意两条车道线的平均宽度,a表示匹配区域的下限值,b表示匹配区域的上限值,df(x)表示差值函数,l1.start表示一车道线l1的纵向起始点,l1.end表示一车道线l1的纵向终止点,l2.start表示另一车道线l2的纵向起始点,l2.end表示另一车道线l2的纵向终止点。
33、本技术在一较佳示例中可以进一步配置为:所述归一化损失的表达式包括,
34、
35、式中,loss表示归一化损失,df(x)表示差值函数,w表示任意两条车道线的平均宽度,α表示匹配区域的下限值,b表示匹配区域的上限值。
36、本技术在一较佳示例中可以进一步配置为:根据所述相似性,构建匹配代价函数的步骤包括,
37、基于两条车道线的所述平均宽度、所述归一化损失和所述平行相似性等级,构建匹配代价函数,所述匹配代价函数的表达式包括,
38、cost_ij=(abs(w)+loss)*(z-similarity)
39、式中,cost_ij表示任意两条车道线的匹配代价,w表示任意两条车道线的平均宽度,loss表示任意两条车道线的归一化损失,similarity表示任意两条车道线的平行相似性等级的表征数值,z>similarity。
40、本技术在一较佳示例中可以进一步配置为:所述车道线方程的表达式包括,
41、l=f(x)=c0+c1·x+c2·x2+c3·x3
42、式中,l表示车道线,f(x)表示车道线方程的函数值,c0、c1、c2和c3为常数。
43、第二方面,本技术提供一种车道线匹配装置。
44、本技术是通过以下技术方案得以实现的:
45、一种车道线匹配装置,包括,
46、车道线表征模块,用于识别视频画面中的车道线,采用多项式曲线表征待匹配的所述车道线,得到车道线方程;
47、相似性模块,用于基于所述车道线方程,预测任意两条车道线之间的相似性;
48、匹配代价函数模块,用于根据所述相似性,构建匹配代价函数;
49、匹配代价矩阵模块,用于通过所述匹配代价函数,获得待匹配的所述车道线的匹配代价矩阵;
50、最优匹配模块,用于求解所述匹配代价矩阵,得到最优匹配的两条车道线;
51、筛选模块,用于判断最优匹配的两条所述车道线是否满足预设条件,将满足预设条件的两条所述车道线匹配为不同时刻或者不同空间的同一车道线。
52、第三方面,本技术提供一种计算机设备。
53、本技术是通过以下技术方案得以实现的:
54、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任意一种车道线匹配方法的步骤。
55、第四方面,本技术提供一种计算机可读存储介质。
56、本技术是通过以下技术方案得以实现的:
57、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述任意一种车道线匹配方法的步骤。
58、综上所述,与现有技术相比,本技术提供的技术方案带来的有益效果至少包括:
59、仅用待匹配的两车道线方程计算两车道线之间的相似性,并构建匹配代价函数预估匹配代价矩阵,相比于传统的根据拍摄车道线与地图车道线之间的旋转矩阵r和横向平移变量t等构建的匹配矩阵,计算量更小,匹配速度更快,且可用于不同时刻和不同空间对同一车道线的观测之间的匹配,适用范围更大;无需事先获取拍摄车道线点在地图车道线对应点的匹配关系,实现更简单。
- 还没有人留言评论。精彩留言会获得点赞!