一种粉尘一体化智能治理方法、设备及介质与流程
本技术涉及人工智能领域,尤其涉及一种粉尘一体化智能治理方法、设备及介质。
背景技术:
1、现有的料场粉尘治理是浓度监测仪检测到料棚内的粉尘浓度达到预设阈值上限时,则启动雾炮进行喷雾抑尘,其治理具有明显的滞后性。同时,雾炮的启动时,其喷雾方式为按照预设程序水平往复转动喷雾,无法精确跟踪产尘目标进行喷雾,治理效果往往不佳。
2、当运输车辆和挖掘机在工作时,往往容易造成料场中烟羽粉尘的大量生成,对环境造成大量的污染,并且难以根据车辆行驶或者作业过程中,对其进行精准定位,造成了烟羽粉尘治理的滞后性,使粉尘治理的效率低,且浪费大量水资源。
技术实现思路
1、本技术实施例提供了一种粉尘一体化智能治理方法、设备及介质,用于解决如下技术问题:现有的料场粉尘治理方法存在滞后性,难以根据作业车辆实时产生烟羽粉尘进行精准跟踪式的喷雾治理,造成了治理效果差且容易浪费大量水资源。
2、本技术实施例采用下述技术方案:
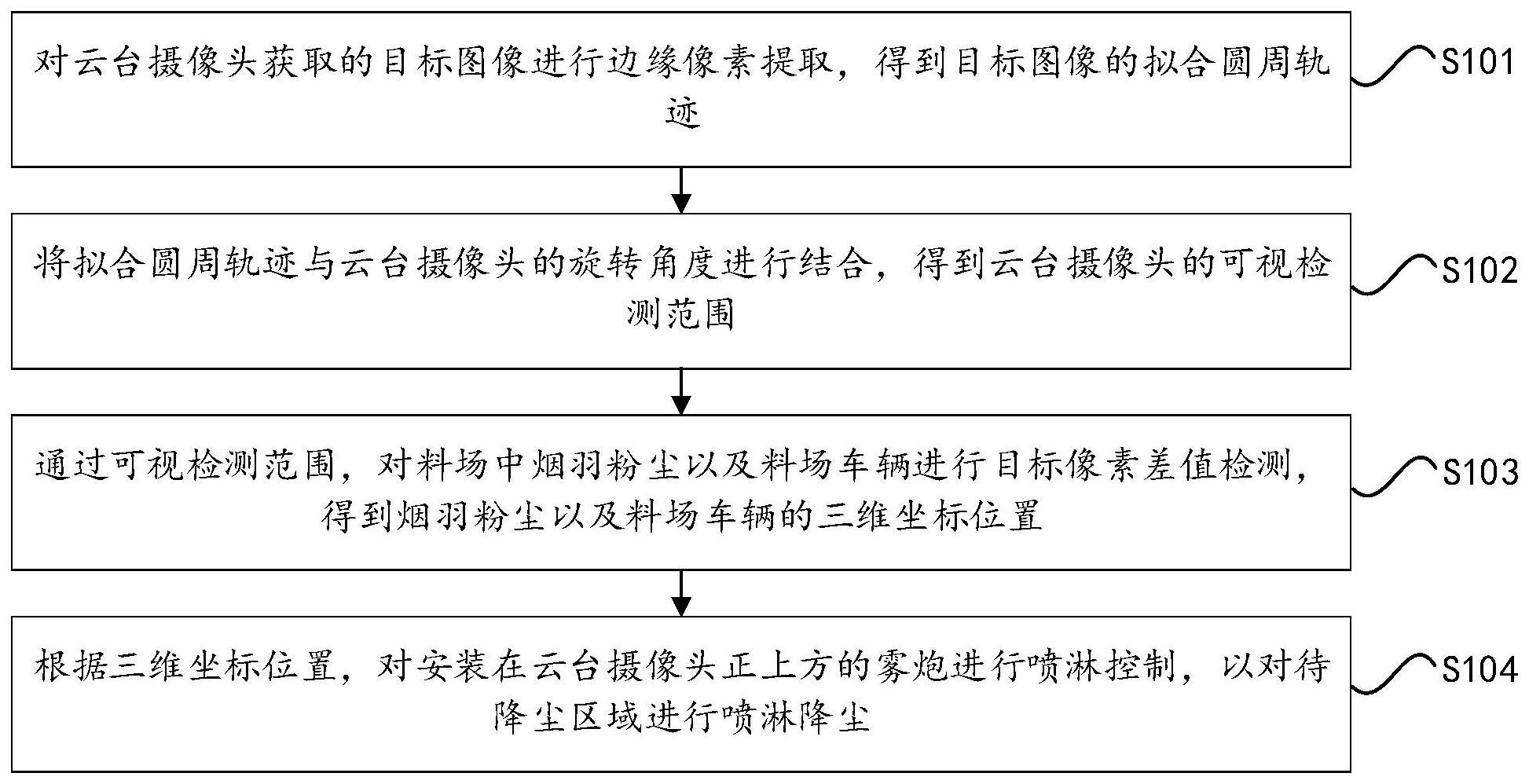
3、一方面,本技术实施例提供了一种粉尘一体化智能治理方法,包括:对云台摄像头获取的目标图像进行边缘像素提取,得到所述目标图像的拟合圆周轨迹;将所述拟合圆周轨迹与所述云台摄像头的旋转角度进行结合,得到所述云台摄像头的可视检测范围;通过所述可视检测范围,对料场中烟羽粉尘以及料场车辆进行目标像素差值检测,得到所述烟羽粉尘以及料场车辆的三维坐标位置;根据所述三维坐标位置,对安装在所述云台摄像头正上方的雾炮进行喷淋控制,以对待降尘区域进行喷淋降尘。
4、本技术实施例通过带云台摄像头实时监控料场,使用目标检测算法实时检测料场中的烟羽粉尘及容易造成粉尘的运输车辆和挖掘机。计算检测的目标像素视差值,利用烟羽粉尘视差模型,计算出检测的烟羽粉尘及料场车辆在云台坐标系下的三维坐标位置。智能联动系统根据三维坐标位置,锁定烟羽及料场车辆位置,控制雾炮转向,启动喷雾系统进行喷淋,能够精确跟踪产尘目标进行喷雾,治理效率高效果好,且节省大量水资源。
5、在一种可行的实施方式中,对云台摄像头获取的目标图像进行边缘像素提取,得到所述目标图像的拟合圆周轨,具体包括:确定出检测范围内的目标物;通过所述云台摄像头,对所述目标物进行图像获取,得到所述目标图像,并将此位置的所述云台摄像设为初始位置;其中,所述目标物位于所述目标图像的中心位置;根据所述云台摄像的初始位置,调节所述云台摄像头进行水平转动角,并分别获取不同水平角度下的若干测试图像;检测所述若干测试图像中云台轨迹圆的边缘像素,并根据所述云台轨迹圆的边缘像素,随机提取若干个像素点,得到基于所述目标图像的拟合圆周轨迹。
6、在一种可行的实施方式中,将所述拟合圆周轨迹与所述云台摄像头的旋转角度进行结合,得到所述云台摄像头的可视检测范围,具体包括:根据所述云台摄像头的旋转角度,确定出所述云台摄像头的取景视角参数;将所述拟合圆周轨迹与所述旋转角度进行一一对应结合,得到拟合圆周轨迹参数;根据所述拟合圆周轨迹参数与所述取景视角参数,对所述云台摄像头的可视范围进行测算,得到所述云台摄像头的可视检测范围。
7、本技术实施例通过对云台摄像头的可视检测范围的检测,能够测算出最大可视范围,为目标识别与料场准备定位提供保证。
8、在一种可行的实施方式中,在通过所述可视检测范围,对料场中烟羽粉尘以及料场车辆进行目标像素差值检测,得到所述烟羽粉尘以及料场车辆的三维坐标位置之前,所述方法还包括:采集所述料场中的烟羽粉尘图像;通过预设yolox-darknet的主干神经网络结构,对所述烟羽粉尘图像进行残差网络的反向传播方式,得到预处理烟羽粉尘图像;获取与所述预处理烟羽粉尘图像对应的若干视频帧,并对所述若干视频帧进行双帧差分监测,得到所述若干视频帧之间的像素差值变化特征;根据所述预处理烟羽粉尘图像的像素变化特征,对所述yolox-darknet的主干神经网络结构进行重点监督训练,得到烟羽粉尘视差模型;其中,所述烟羽粉尘视差模型用于训练识别出半透明物体以及烟羽粉尘的天然保护色。
9、本技术实施例通过采用双帧差分监测帧与帧之间像素级别的变化方案,并对yolox-darknet的主干神经网络结构做重点监督训练,解决了半透明物体识别效果差及烟羽粉尘天然保护色问题,提高了烟羽粉尘视差模型对烟羽粉尘图像的识别效果。
10、在一种可行的实施方式中,在得到烟羽粉尘视差模型之后,所述方法还包括:通过预设深度学习yolov5+deepsort算法,将料场车辆图像进行车辆表面光线特征的提取,得到车辆亮暗特征;根据所述料场车辆图像对应视频帧的光流信息,将当前视频帧的车辆亮暗特征与相邻视频帧的车辆亮暗特征进行近邻匹配,以对所述料场车辆进行实时目标跟踪,得到所述料场车辆的目标追踪算法。
11、本技术实施例通过对目标车辆图像跟踪过程中提取的车辆表观光线特征进行视频帧的近邻匹配,可以有效的改善遮挡情况下的目标追踪效果差的问题,得到用于实时追踪料场车辆的目标追踪算法。
12、在一种可行的实施方式中,通过所述可视检测范围,对料场中烟羽粉尘以及料场车辆进行目标像素差值检测,得到所述烟羽粉尘以及料场车辆的三维坐标位置,具体包括:根据所述可视检测范围,实时读取所述云台摄像头的rtsp视频流信息;根据所述rtsp视频流信息,基于所述烟羽粉尘视差模型以及所述目标追踪算法,将若干rtsp视频帧中对应的烟羽粉尘图像特征以及料场车辆图像特征进行像素位置与像素高度的识别,得到实时目标像素值;其中,所述实时目标像素值包括:实时目标像素位置以及实时目标像素高度;将所述实时目标像素值与历史目标像素值进行像素差值检测计算,得到目标像素差值;通过所述烟羽粉尘视差模型以及预设云台坐标系,将所述目标像素差值对应的烟羽粉尘图像特征以及料场车辆图像特征进行三维位置的判断,得到所述烟羽粉尘的三维坐标位置以及所述料场车辆的三维坐标位置。
13、在一种可行的实施方式中,根据所述三维坐标位置,对安装在所述云台摄像头正上方的雾炮进行喷淋控制,以对待降尘区域进行喷淋降尘,具体包括:获取所述烟羽粉尘以及料场车辆的三维坐标位置;将所述烟羽粉尘以及料场车辆的三维坐标位置转换为控制坐标,并根据目标像素差值,确定出所述烟羽粉尘的变化面积值;其中,所述控制坐标为控制所述雾炮进行运动的坐标;基于所述控制坐标,根据所述烟羽粉尘的变化面积值,识别出所述待降尘区域以及对应的喷淋时间;根据所述待降尘区域以及对应的喷淋时间,控制所述雾炮进行喷淋降尘。
14、在一种可行的实施方式中,在根据所述待降尘区域以及对应的喷淋时间,控制所述雾炮进行喷淋降尘之后,所述方法还包括:若达到所述喷淋时间并且所述目标像素差值小于第一预设阈值,则将所述雾炮进行停止控制,并对安装在所述云台摄像头正上方的雾炮进行复位操作。
15、第二方面,本技术实施例还提供了一种粉尘一体化智能治理设备,所述设备包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有能够被所述至少一个处理器执行的指令,以使所述至少一个处理器能够执行上述任一实施方式所述的一种粉尘一体化智能治理方法。
16、第三方面,本技术实施例还提供了一种非易失性计算机存储介质,其特征在于,所述存储介质为非易失性计算机可读存储介质,所述非易失性计算机可读存储介质存储有至少一个程序,每个所述程序包括指令,所述指令当被终端执行时,使所述终端执行上述任一实施方式所述的一种粉尘一体化智能治理方法。
17、本技术提供了一种粉尘一体化智能治理方法、设备及介质,通过带云台摄像头实时监控料场,使用目标检测算法实时检测料场中的烟羽粉尘及容易造成粉尘的运输车辆和挖掘机。计算检测的目标像素视差值,利用烟羽粉尘视差模型,计算出检测的烟羽粉尘及料场车辆在云台坐标系下的三维坐标位置。智能联动系统根据三维坐标位置,锁定烟羽及料场车辆位置,控制雾炮转向,启动喷雾系统进行喷淋,能够精确跟踪产尘目标进行喷雾,治理效率高效果好,且节省大量水资源。
- 还没有人留言评论。精彩留言会获得点赞!