车道线检测方法、装置、电子设备及存储介质与流程
本技术涉及自动驾驶,尤其涉及一种车道线检测方法、装置、电子设备及存储介质。
背景技术:
1、目前,车道线检测是自动驾驶技术领域的重要问题。在车道线检测中,需要借助有限的信息检测出场景中所有车道线的位置。目前车道线场景比较复杂,例如,交叉、回合、褪色等情况,为了应对复杂的车道线场景,目前采用的车道线检测模型大而复杂,只能部署在图像处理器gpu中,难以部署在车辆中,且大而复杂的模型训练成本高,维护难度大。
技术实现思路
1、本技术旨在至少在一定程度上解决相关技术中的技术问题之一。
2、本技术提出一种车道线检测方法,以实现采用量化的车道线检测模型,进行车道线检测处理;其中,量化的车道线检测模型计算量小,训练成本低,维护难度小,且容易部署在车辆中。
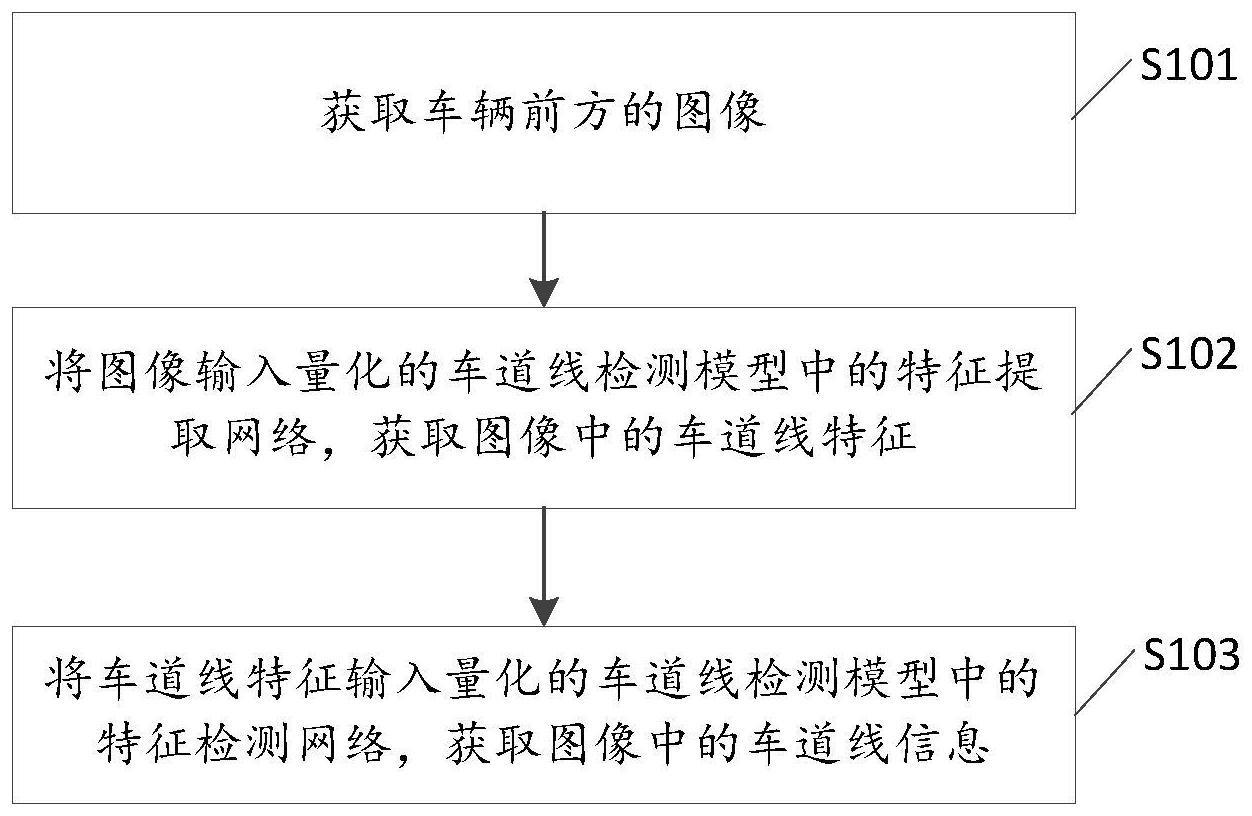
3、本技术第一方面实施例提出了一种车道线检测方法,包括:获取车辆前方的图像;将所述图像输入量化的车道线检测模型中的特征提取网络,获取所述图像中的车道线特征;将所述车道线特征输入所述量化的车道线检测模型中的特征检测网络,获取所述图像中的车道线信息。
4、本技术实施例的车道线检测方法,通过获取车辆前方的图像;将图像输入量化的车道线检测模型中的特征提取网络,获取图像中的车道线特征;将车道线特征输入量化的车道线检测模型中的特征检测网络,获取图像中的车道线信息,从而能够通过量化的车道线检测模型,降低模型计算量,降低模型的训练成本,降低模型的维护难度,使得车道线检测模型可以部署在车辆中,提高车道线检测模型的部署效率。
5、可选地,所述将所述车道线特征输入所述量化的车道线检测模型中的特征检测网络,获取所述图像中的车道线信息,包括:将所述车道线特征输入所述特征检测网络,获取检测结果,其中,所述检测结果包括:图像中是否包括车道线、车道线在图像中的出现位置和消失位置、车道线在图像中的像素点位置、每个所述像素点位置上存在车道线的概率;根据所述检测结果,确定所述图像中的所述车道线信息。
6、可选地,所述根据所述检测结果,确定所述图像中的所述车道线信息,包括:在所述图像中包括车道线的情形下,根据车道线在图像中的出现位置和消失位置、车道线在图像中的像素点位置、每个所述像素点位置上存在车道线的概率,确定所述图像中的车道线数量,以及每条车道线所占用的像素点;根据所述图像中的车道线数量,以及每条车道线所占用的像素点,确定所述图像中的所述车道线信息。
7、可选地,所述量化的车道线检测模型中,参数的比特位数小于指定比特位数。
8、可选地,在将所述图像输入量化的车道线检测模型中的特征提取网络,获取所述图像中的车道线特征之前,所述方法还包括:获取所述量化的车道线检测模型;对所述量化的车道线检测模型进行部署处理。
9、可选地,所述获取所述量化的车道线检测模型,包括:向服务器发送车道线检测模型获取请求;接收所述服务器返回的所述量化的车道线检测模型。
10、可选地,所述获取所述量化的车道线检测模型,包括:获取训练数据,所述训练数据包括:多个样本图像,以及所述样本图像中的样本车道线信息;获取初始的车道线检测模型;采用多个所述样本图像以及所述样本图像中的样本车道线信息,对所述初始的车道线检测模型进行参数调整以及参数量化处理,得到所述量化的车道线检测模型。
11、可选地,所述采用多个所述样本图像以及所述样本图像中的样本车道线信息,对所述初始的车道线检测模型进行参数调整以及参数量化处理,得到所述量化的车道线检测模型,包括:将所述样本图像输入所述车道线检测模型,获取所述车道线检测模型输出的预测车道线信息;根据所述样本图像中的样本车道线信息以及所述预测车道线信息,构建损失函数;根据所述损失函数的数值,对所述车道线检测模型进行参数调整以及参数量化处理,得到所述量化的车道线检测模型。
12、可选地,在获取初始的车道线检测模型之后,所述方法还包括:对所述初始的车道线检测模型进行以下至少一种算子的删除处理:1×1的卷积算子、attention算子、加法算子;对所述初始的车道线检测模型进行卷积通道数量的减少处理。
13、本技术第二方面实施例提出了一种车道线检测装置,包括:获取模块,用于获取车辆前方的图像;第一输入模块,用于将所述图像输入量化的车道线检测模型中的特征提取网络,获取所述图像中的车道线特征;第二输入模块,用于将所述车道线特征输入所述量化的车道线检测模型中的特征检测网络,获取所述图像中的车道线信息。
14、本技术实施例的车道线检测装置,通过获取车辆前方的图像;将图像输入量化的车道线检测模型中的特征提取网络,获取图像中的车道线特征;将车道线特征输入量化的车道线检测模型中的特征检测网络,获取图像中的车道线信息,从而能够通过量化的车道线检测模型,降低模型计算量,降低模型的训练成本,降低模型的维护难度,使得车道线检测模型可以部署在车辆中,提高车道线检测模型的部署效率。
15、可选地,所述第二输入模块具体用于,将所述车道线特征输入所述特征检测网络,获取检测结果,其中,所述检测结果包括:图像中是否包括车道线、车道线在图像中的出现位置和消失位置、车道线在图像中的像素点位置、每个所述像素点位置上存在车道线的概率;根据所述检测结果,确定所述图像中的所述车道线信息。
16、可选地,所述第二输入模块具体还用于,在所述图像中包括车道线的情形下,根据车道线在图像中的出现位置和消失位置、车道线在图像中的像素点位置、每个所述像素点位置上存在车道线的概率,确定所述图像中的车道线数量,以及每条车道线所占用的像素点;根据所述图像中的车道线数量,以及每条车道线所占用的像素点,确定所述图像中的所述车道线信息。
17、可选地,所述量化的车道线检测模型中,参数的比特位数小于指定比特位数。
18、可选地,所述装置还包括:部署处理模块;所述获取模块,还用于获取所述量化的车道线检测模型;所述部署处理模块,用于对所述量化的车道线检测模型进行部署处理。
19、可选地,所述获取模块具体用于,向服务器发送车道线检测模型获取请求;接收所述服务器返回的所述量化的车道线检测模型。
20、可选地,所述获取模块具体用于,获取训练数据,所述训练数据包括:多个样本图像,以及所述样本图像中的样本车道线信息;获取初始的车道线检测模型;采用多个所述样本图像以及所述样本图像中的样本车道线信息,对所述初始的车道线检测模型进行参数调整以及参数量化处理,得到所述量化的车道线检测模型。
21、可选地,所述获取模块具体还用于,将所述样本图像输入所述车道线检测模型,获取所述车道线检测模型输出的预测车道线信息;根据所述样本图像中的样本车道线信息以及所述预测车道线信息,构建损失函数;根据所述损失函数的数值,对所述车道线检测模型进行参数调整以及参数量化处理,得到所述量化的车道线检测模型。
22、可选地,所述获取模块具体还用于,对所述初始的车道线检测模型进行以下至少一种算子的删除处理:1×1的卷积算子、attention算子、加法算子;对所述初始的车道线检测模型进行卷积通道数量的减少处理。
23、本技术第三方面实施例提出了一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本技术第一方面实施例提出的车道线检测方法。
24、本技术第四方面实施例提出了一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令用于使所述计算机执行本技术第一方面实施例提出的车道线检测方法。
25、本技术第五方面实施例提出了一种计算机程序产品,当所述计算机程序产品中的指令处理器执行时,执行本技术第一方面实施例提出的车道线检测方法。
26、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!