基于FPGA语言的图像边界锐化算法、装置和控制系统的制作方法
本公开涉及,尤其涉及一种基于fpga语言的图像边界锐化算法、装置和控制系统。
背景技术:
1、相机需要在fpga上进行,同时需要快速实时处理数据,并有需要保证低延迟的要求,所以无法进行迭代操作,且资源有限。
2、目前现有一些算法比如图像锐化算法,是使图像边缘更清晰的一种图像处理方法,常用的做法是提取图像的高频分量,将其叠加到原图上。图像高频分量的提取有两种做法,一种是用高通滤波器,得到高频分量,另一种是通过低通滤波,用原图减低频得以高频。直接提取高频的方法有sobel算法、laplcian算子等,sobel算子是图像的一阶导数,提取的是梯度信息,分水平和垂直两种,常常用来做边缘检测、方向判别,sobel算子在斜坡处不为0,因此会产生较粗的边缘。
3、因此上述算法主要是采用对图像高频分量进行增强,但是如果想要使用小资源而不用迭代的方式等实现又都比较不实用,同时锐化可能会增大孤立的的噪声增大。
4、然而针对工业显微镜环境需求,要求图像可以对很细的边界进行精准锐化,同时又要保证尽可能多的进行连贯性锐化用于取得更高的图像效果。因此有必要进行算法改进,提高图像边界锐化效果。
技术实现思路
1、为了解决上述问题,本技术提出一种基于fpga语言的图像边界锐化算法、装置和控制系统。
2、本技术一方面,提出一种基于fpga语言的图像边界锐化算法,其特征在于,包括如下步骤:
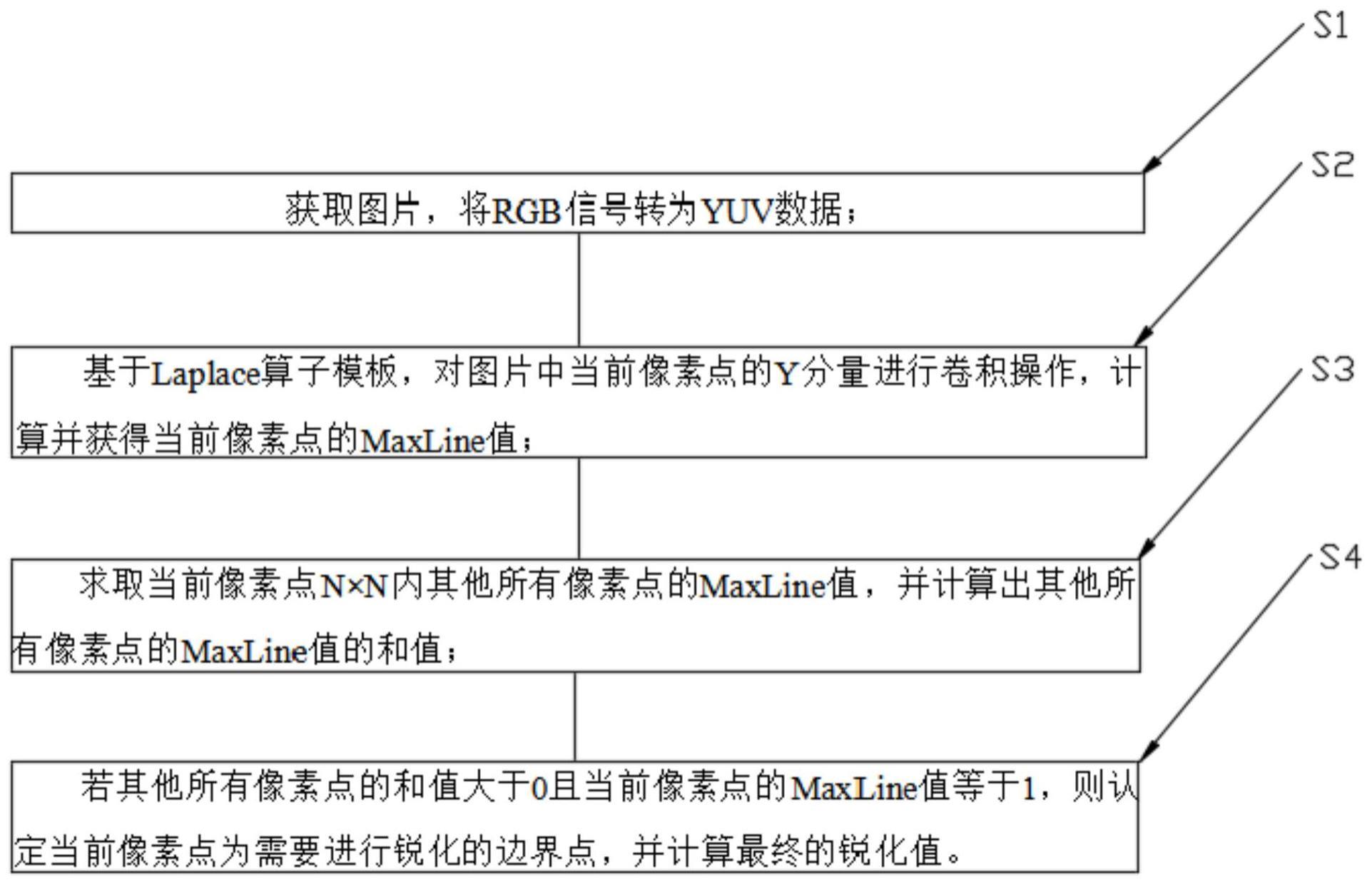
3、获取图片,将rgb信号转为yuv数据;
4、基于laplace算子模板,对图片中当前像素点的y分量进行卷积操作,计算并获得当前像素点的maxline值;
5、求取当前像素点n×n内其他所有像素点的maxline值,并计算出其他所有像素点的maxline值的和值;
6、若其他所有像素点的和值大于0且当前像素点的maxline值等于1,则认定当前像素点为需要进行锐化的边界点,并计算最终的锐化值。
7、作为本技术的一可选实施方案,可选地,基于laplace算子模板,对图片中当前像素点的y分量进行卷积操作,计算并获得当前像素点的maxline值,包括:
8、使用laplace算子,构建laplace算子模板;
9、进行非极大值x抑制操作,利用所构建的laplace算子模板x,对当前像素点的x分量做卷积,计算得到gayx分量;
10、进行y分量卷积操作,利用所构建的laplace算子模板y,对当前像素点的y分量做卷积,计算得到gayy分量;
11、计算gayx分量的绝对值和gayy分量的绝对值之和,得到grad:
12、grad=gayx分量的绝对值+gayy分量的绝对值;
13、令dtemp=grad。
14、作为本技术的一可选实施方案,可选地,基于laplace算子模板,对图片中当前像素点的y分量进行卷积操作,计算并获得当前像素点的maxline值,还包括:
15、根据gayx分量和gayy分量,计算当前像素点的梯度值;
16、对梯度值进行插值处理,得到当前像素点的梯度阈值;
17、在预设范围内,判断当前像素点的dtemp是否超过所述梯度阈值:
18、是则maxline=1,当前像素点需进行锐化;
19、否则maxline=0,当前像素点不需要进行检测。
20、作为本技术的一可选实施方案,可选地,根据gayx分量和gayy分量,计算当前像素点的梯度值,包括:
21、(1)如果gayy分量比gayx分量大,说明导数方向趋向于y分量,则:
22、g2=grad[npos-w];
23、g4=grad[npos+w];
24、如果gayx分量和gayy分量的数值正负相同,则:
25、g1=grad[npos-w-1];
26、g3=grad[npos+w+1];
27、如果gayx分量和gayy分量的数值正负不相同,则
28、g1=grad[npos-w+1];
29、g3=grad[npos+w-1];
30、(2)如果gayx分量比gayy分量大,说明导数方向趋向于x分量,则:
31、g2=grad[npos+1];
32、g4=grad[npos-1];
33、如果gayx分量和gayy分量的数值正负相同,则:
34、g1=grad[npos+w+1];
35、g3=grad[npos-w-1];
36、如果gayx分量和gayy分量的数值正负不相同,则:
37、g1=grad[npos-w+1];
38、g3=grad[npos+w-1];
39、其中,npos指的是当前像素点,w指的是窗口大小。
40、作为本技术的一可选实施方案,可选地,对梯度值进行插值处理,得到当前像素点的梯度阈值,包括:
41、利用g1~g4对梯度进行插值:
42、dtemp1=(g1+g2)/2;
43、dtemp2=(g3+g4)/2。
44、作为本技术的一可选实施方案,可选地,求取当前像素点n×n内其他所有像素点的maxline值,并计算出其他所有像素点的maxline值的和值,包括:
45、获取当前像素点的dtemp,如果(dtemp>=dtemp1)且(dtemp>=dtemp2),那么即maxline=1否则maxline=0;
46、按照上述方式,计算当前像素点n×n内其他所有像素点的maxline值;
47、对当前像素点n×n内其他所有像素点的maxline值进行累加,得到当前像素点n×n内其他所有像素点的maxline值的和值。
48、作为本技术的一可选实施方案,可选地,计算最终的锐化值,包括:
49、获取当前像素点的锐度值,判断锐度值的正负情况:
50、当锐度值为正数时,判断为增加,如果大于255-目标值,否则等于255-目标值;
51、当锐度值为负数时,判断为减少,判断如果锐度值大于当前值,则令锐度值等于当前值;再和原值的中心点值累加,得到最终的锐化值。
52、本技术另一方面,提出一种装置,用于实现所述的基于fpga语言的图像边界锐化算法,包括:
53、图像获取模块,用于获取图片,将rgb信号转为yuv数据;
54、算子卷积模块,用于基于laplace算子模板,对图片中当前像素点的y分量进行卷积操作,计算并获得当前像素点的maxline值;
55、和值计算模块,用于求取当前像素点n×n内其他所有像素点的maxline值,并计算出其他所有像素点的maxline值的和值;
56、边界点识别模块,用于在若其他所有像素点的和值大于0且当前像素点的maxline值等于1时,则认定当前像素点为需要进行锐化的边界点,并计算最终的锐化值。
57、本技术另一方面,还提出一种控制系统,包括:
58、处理器;
59、用于存储处理器可执行指令的存储器;
60、其中,所述处理器被配置为执行所述可执行指令时实现所述的基于fpga语言的图像边界锐化算法。
61、本发明的技术效果:
62、本技术通过获取图片,将rgb信号转为yuv数据;基于laplace算子模板,对图片中当前像素点的y分量进行卷积操作,计算并获得当前像素点的maxline值;求取当前像素点n×n内其他所有像素点的maxline值,并计算出其他所有像素点的maxline值的和值;若其他所有像素点的和值大于0且当前像素点的maxline值等于1,则认定当前像素点为需要进行锐化的边界点,并计算最终的锐化值。通过laplace算子模板计算并找到符合锐化条件的边界点,以此对其进行锐化处理。laplacian比sobel算子更适合做图像锐化。针对工业显微镜环境需求,要求图像可以对很细的边界进行精准锐化,同时又要保证尽可能多的进行连贯性锐化用于取得更高的图像效果。本技术的图像边界锐化算法本身,占用资源较少,可以减少孤立点的噪声。
63、根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!