定位方法、热力成像方法、装置、电子设备及存储介质与流程
本技术涉及计算机,尤其涉及一种定位方法、热力成像方法、装置、电子设备及存储介质。
背景技术:
1、在相机工作过程中(例如,图像测量过程以及机器视觉应用中),为确定空间物体表面某点(即标定点)的三维几何位置与其在图像中对应点之间的转换关系,必须建立相机成像的几何模型,即相机参数。该得到相机参数的过程称为相机标定(或摄像机标定)。且标定结果的精度以及算法的稳定性,直接影响相机工作的准确性。
2、在相关技术中,通常会由于相机的镜头视野过窄、操作者拍摄不当等原因,导致标定板拍摄补全,存在污点等情况,影响对标定点的位置确定,进而造成相机的误标定、漏标定等。在该情况下,通常需要相关人员手动测量标定点的位置,也会影响测量位置的准确度,进而影响相机参数的精度,且该过程所需的人力成本和时间成本较高,会影响相机标定过程的工作效率。
技术实现思路
1、本技术实施例提供了一种定位方法,以解决相关技术中,相机标定精确度较低的问题。
2、相应的,本技术实施例还提供了一种定位装置、热力成像方法、热力成像装置、一种电子设备以及一种存储介质,用以保证上述方法的实现及应用。
3、一方面,本技术实施例提供一种定位方法,该方法包括:
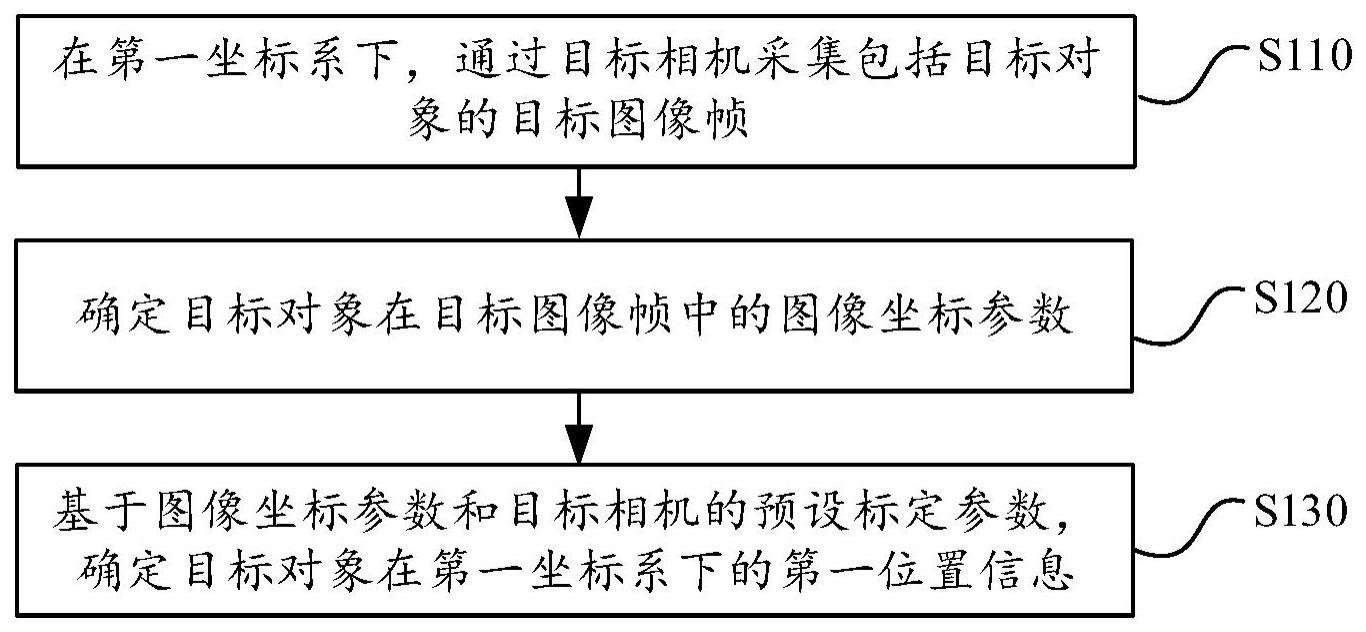
4、在第一坐标系下,通过目标相机采集包括目标对象的目标图像帧;
5、确定目标对象在目标图像帧中的图像坐标参数;其中,该图像坐标参数为目标相机的图像坐标系下的坐标参数;
6、基于图像坐标参数和目标相机的预设标定参数,确定目标对象在第一坐标系下的第一位置信息;其中,预设标定参数是基于超宽带技术uwb对目标相机进行标定得到的。
7、另一方面,本技术实施例提供了一种热力成像方法,其特征在于,该方法应用于热力成像设备中,包括:
8、接收目标对象在第一坐标系下的第一位置信息;其中,该第一位置信息是基于目标相机的预设标定参数与目标对象在目标图像帧中的图像坐标参数确定的;图像坐标参数为目标相机的图像坐标系下的坐标参数;目标图像帧是在第一坐标系下,通过目标相机对目标对象采集得到的;预设标定参数是基于超宽带技术uwb对目标相机进行标定得到的;
9、基于热力成像设备的热力成像坐标系的坐标原点和图像坐标系的坐标原点,对第一位置信息进行校正,得到校正后的位置信息;
10、将校正后的位置信息映射至热力成像坐标系中,并基于映射后的位置信息进行热力成像操作。
11、另一方面,本技术实施例提供了一种定位装置,该装置包括:
12、图像帧采集模块,用于在第一坐标系下,通过目标相机采集包括目标对象的目标图像帧;
13、图像坐标参数确定模块,用于确定目标对象在目标图像帧中的图像坐标参数;其中,该图像坐标参数为目标相机的图像坐标系下的坐标参数;
14、第一位置信息确定模块,用于基于图像坐标参数和目标相机的预设标定参数,确定目标对象在第一坐标系下的第一位置信息;其中,预设标定参数是基于超宽带技术uwb对目标相机进行标定得到的。
15、可选地,上述装置还可以包括相机标定模块,该相机标定模块用于:
16、基于uwb,获取至少三个样本对象在第一坐标系下的第二位置信息;
17、通过目标相机采集包括样本对象的第一图像,并基于第一图像,确定样本对象在图像坐标系下的第三位置信息;
18、基于第二位置信息和第三位置信息,确定预设标定参数。
19、可选地,上述相机标定模块在获取至少三个样本对象在第一坐标系下的第二位置信息时,可以具体用于:
20、获取参考基站在第一坐标系下的第四位置信息;
21、基于uwb,确定从参考基站向每个样本对象进行消息传输所需的第一时间间隔;
22、基于样本对象对应的第一时间间隔和传输消息的速度信息,确定样本对象与参考基站在第一坐标系下的第一距离信息;
23、基于样本对象对应的第一距离信息和第四位置信息,确定第二位置信息。
24、可选地,上述相机标定模块在基于第二位置信息和第三位置信息,确定预设标定参数时,可以具体用于:
25、基于第二位置信息和第三位置信息,构建图像坐标系和第一坐标系之间的坐标转换关系;
26、基于样本对象对应的坐标转换关系,确定预设标定参数。
27、可选地,上述图像帧采集模块在通过目标相机采集包括目标对象的目标图像帧时,可以具体用于:
28、通过目标相机采集包括目标对象的目标视频;
29、确定目标视频中的第一视频帧和第二视频帧;该第一视频帧为目标视频中的第一帧视频帧,第二视频帧为目标视频中除第一视频帧外的任一视频帧;
30、在第二视频帧与第一视频帧之间的像素差值满足预设条件的情况下,将第二视频帧确定为目标图像帧。
31、可选地,上述图像坐标参数确定模块在确定目标对象在目标图像帧中的图像坐标参数时,可以具体用于:
32、对目标图像帧进行降噪处理,得到降噪后的图像帧;
33、基于降噪后的图像帧,确定上述图像坐标参数。
34、另一方面,本技术实施例提供了一种热力成像装置,该装置应用于热力成像设备中,包括:
35、第一位置信息接收模块,用于接收目标对象在第一坐标系下的第一位置信息;其中,该第一位置信息是基于目标相机的预设标定参数与目标对象在目标图像帧中的图像坐标参数确定的;图像坐标参数为目标相机的图像坐标系下的坐标参数;目标图像帧是在第一坐标系下,通过目标相机对目标对象采集得到的;预设标定参数是基于超宽带技术uwb对目标相机进行标定得到的;
36、位置信息校正模块,用于基于热力成像设备的热力成像坐标系的坐标原点和图像坐标系的坐标原点,对第一位置信息进行校正,得到校正后的位置信息;
37、热力成像模块,用于将校正后的位置信息映射至热力成像坐标系中。
38、可选地,上述热力成像模块在将校正后的位置信息映射至热力成像坐标系中时,可以具体用于:
39、对校正后的位置信息进行数据聚合,得到聚合后的位置信息;
40、将聚合后的位置信息映射至热力成像坐标系中。
41、另一方面,本技术实施例提供了一种电子设备,包括处理器和存储器,该处理器和存储器相互连接;
42、上述存储器用于存储计算机程序;
43、上述处理器被配置用于在调用上述计算机程序时,执行本技术实施例提供的定位方法或热力成像方法。
44、另一方面,本技术实施例提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行以实现本技术实施例提供的定位方法或热力成像方法。
45、在本技术实施例中,通过基于超宽带技术uwb对目标相机进行标定得到目标相机的预设标定参数,可以提高相机标定的准确率和精确度。进一步地,通过将该预设标定参数应用于定位过程中,具体地:在第一坐标系下,通过目标相机采集包括目标对象的目标图像帧,确定目标对象在目标图像帧中的图像坐标参数,并基于图像坐标参数和目标相机的预设标定参数,确定目标对象在第一坐标系下的第一位置信息。基于准确率和精确度的相机标定参数,对目标对象进行定位,提高了对目标对象的定位准确率。
- 还没有人留言评论。精彩留言会获得点赞!