一种基于三维传感器的点云拼接方法、系统和存储介质与流程
本技术属于三维测量,更具体的,涉及一种基于三维传感器的点云拼接方法、系统和存储介质。
背景技术:
1、三维测量技术已广泛应用于工业检测、逆向工程领域,是保障产品质量的重要手段。常见的三维传感器有线激光扫描仪、结构光、双目视觉等。然而,由于单个传感器的数据视图有限,在面对工业环境中的复杂测量场景时,常有目标物体遮挡、尺寸过大,导致点云缺失和不完整等问题,因此必须进行点云拼接以满足测量需求。
2、点云拼接的原理是计算源点云和目标点云间的转换关系,将两点云融合到同一个坐标系下显示。常见的点云拼接方法为利用特征匹配点粗配准以及精配准。
3、粗配准是利用两传感器测量获取到同一特征点,将数据点集进行矩阵运算得到传感器间刚体变换矩阵。其中,特征点一般以测量背景中的视觉特征或依赖于光学标定板获得,前者得到的视觉特征点数量较少无法均匀覆盖整个测量空间域,而后者利用光学标定板的过程繁琐,效率较低。
4、最小迭代方法与梯度下降迭代是精配准中较成熟的方法之一,能精准的拼接两幅点云,但前提是必须提供较准确的初始刚体变换参数,否则容易陷入局部最优解。同时,传统方法匹配点为了便于定位通常为规律的点阵列形式,因此数据行列间相关系数较高,导致标定矩阵病态性严重,矩阵病态性高代表抗扰动能力差,而在实际工业场景中容易有环境噪声或传感器自身等的随机误差,若只提取特征匹配点集进行配准,容易得到较差的初始配准参数,导致陷入局部最优。目前常见的精配准优化方法中较多以单一目标函数作为优化对象,然而转换矩阵中包含旋转及平移多个参数,以目前的方法很难评价优化解在全局的优劣性,导致拼接精度的不确定性提高。
5、目前在计算机视觉应用中,普遍用小孔成像模型来简化相机成像过程,理想假设里,我们定义光心点(模型中的小孔)作为三维坐标原点以光轴和成像平面建立三维坐标系,光轴被定义为穿过所有透镜曲率半径的直线。然而在实际情况中,光轴因加工误差会产生偏移,而光心也会因为透镜组种类、安装位移、标定后位移而有改变。因此在三维成像中,尽管标定了畸变参数,也不可避免的产生三维成像误差,导致即使两款相同三维传感器,上述光轴、光心偏移产生的成像误差分布也不完全相同,因此只依赖于刚体变换是无法精确的将两点云统一到同一坐标系下,最终使点云拼接后全局边界误差增大、精度降低。
技术实现思路
1、有鉴于此,本技术提供了一种基于三维传感器的点云拼接方法、系统和存储介质,解决现有点云拼接方法标定效率低、配准标定方法鲁棒性差以及非严格刚体变换导致变形误差的技术问题。
2、本技术的具体技术方案如下:
3、本技术第一方面提供一种基于三维传感器的点云拼接方法,包括如下步骤:
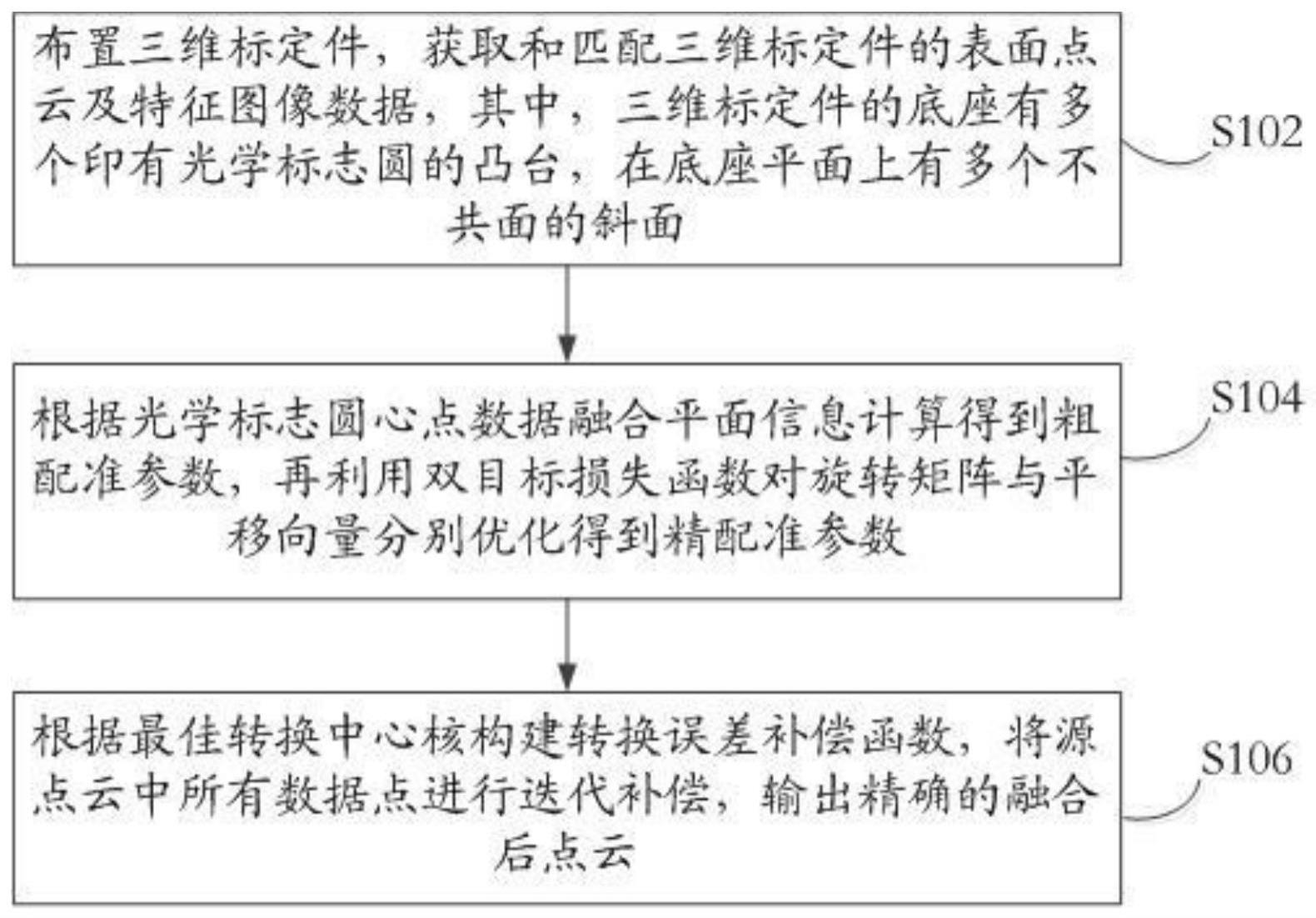
4、布置三维标定件,获取和匹配三维标定件的表面点云及特征图像数据,其中,三维标定件的底座有多个印有光学标志圆的凸台,在底座平面上有多个不共面的斜面;
5、根据光学标志圆心点数据融合平面信息计算得到粗配准参数,再利用双目标损失函数对旋转矩阵与平移向量分别优化得到精配准参数;
6、根据最佳转换中心核构建转换误差补偿函数,将源点云中所有数据点进行迭代补偿,输出精确的融合后点云。
7、进一步的,获取和匹配三维标定件的表面点云及特征图像数据具体为:
8、获取主从相机测量得到的三维标定件表面的有序点云数据,包括标志圆平面点云以及不共面的斜面点云;
9、利用标志圆与斜面点云分布信息分析特征圆心点三维坐标,根据特征圆心点三维坐标定位特征匹配点坐标。
10、进一步的,根据光学标志圆心点数据融合平面信息计算得到粗配准参数具体为:
11、根据特征圆心点三维坐标生成圆心匹配点集,对圆心匹配点集重新中心化;
12、利用最小二乘拟合两坐标系下的平面方程,计算得到主从相机中匹配平面法向量;
13、根据圆心匹配点与匹配平面法向量信息构建转换矩阵,利用svd方法解耦出旋转平移参数即粗配准参数。
14、进一步的,利用双目标损失函数对旋转矩阵与平移向量分别优化得到精配准参数具体为:
15、根据平面点云与目标平面法向量信息构建优化旋转矩阵为主要目标的损失函数,根据圆心匹配点云构建优化平移向量为主要目标的损失函数;
16、利用损失函数的集合向量采用自定义阈值的方式获得精配准参数。
17、进一步的,利用双目标损失函数对旋转矩阵与平移向量分别优化得到精配准参数具体为:
18、对损失函数的集合向量采用mtl方法进行优化定义,获取最优值不为零的对应解;
19、根据函数整体的梯度方向将对应解引入权重值生成函数的梯度参数;
20、通过更新梯度参数对损失函数进行多次迭代,直到函数整体的损失值小于阈值,提取当前的旋转矩阵与平移向量作为精配准参数。
21、进一步的,根据最佳转换中心核构建转换误差补偿函数具体为:获取目标物与光学系统的距离参数,根据距离参数定义最佳转换中心核;
22、以最佳转换中心核为基准构建转换误差补偿函数,输入三维标定件平面点云信息计算出转换补偿参数用于进行迭代补偿。
23、进一步的,还包括:
24、判断粗配准参数是否超过阈值,若超过阈值,则重新布置三维标定件的空间位置,重新分析特征圆心点三维坐标,并重新建立平面点云分割方案定位特征匹配点坐标,以生成新的粗配准参数。
25、本技术第二方面提供一种基于三维传感器的点云拼接系统,包括存储器和处理器,所述存储器中包括基于三维传感器的点云拼接程序,所述基于三维传感器的点云拼接程序被所述处理器执行时,实现如下步骤:
26、布置三维标定件,获取和匹配三维标定件的表面点云及特征图像数据,其中,三维标定件的底座有多个印有光学标志圆的凸台,在底座平面上有多个不共面的斜面;
27、根据光学标志圆心点数据融合平面信息计算得到粗配准参数,再利用双目标损失函数对旋转矩阵与平移向量分别优化得到精配准参数;
28、根据最佳转换中心核构建转换误差补偿函数,将源点云中所有数据点进行迭代补偿,输出精确的融合后点云。
29、进一步的,获取和匹配三维标定件的表面点云及特征图像数据具体为:
30、获取主从相机测量得到的三维标定件表面的有序点云数据,包括标志圆平面点云以及不共面的斜面点云;
31、利用标志圆与斜面点云分布信息分析特征圆心点三维坐标,根据特征圆心点三维坐标定位特征匹配点坐标。
32、本技术第三方面提供一种计算机可读存储介质,所述计算机可读存储介质中包括基于三维传感器的点云拼接程序,所述基于三维传感器的点云拼接程序被处理器执行时,实现所述基于三维传感器的点云拼接方法的步骤。
33、综上所述,本技术提供了一种基于三维传感器的点云拼接方法、系统和存储介质。本技术通过采用底座有多个印有光学标志圆的凸台,底座平面上有多个不共面斜面的三维标定件进行点云拼接标定,提升了标定效率并且能精确完整的拼接两幅点云;根据光学标志圆心点数据融合平面信息计算得到粗配准参数,再利用双目标损失函数对旋转矩阵与平移向量分别优化得到精配准参数,通过非刚体坐标最佳转换核构建转换误差补偿函数,对点云转换误差进行优化。本方法有效降低矩阵病态性,提高粗标定算法的鲁棒性,提升点云拼接标定精度,解决现有点云拼接方法标定效率低、配准标定方法鲁棒性差以及非严格刚体变换导致变形误差的技术问题,满足工业复杂场景中的三维测量需求。
- 还没有人留言评论。精彩留言会获得点赞!