车辆参数辨识方法、装置、计算机可读存储介质及车辆与流程
本技术属于智能驾驶,尤其涉及一种车辆参数辨识方法、装置、计算机可读存储介质及车辆。
背景技术:
1、在工程实践中,车辆参数容易随着车辆的维修保养和使用年限的增加而发生改变,导致可能造成较大的控制误差,并影响车辆的安全性。
2、为了解决这个问题,现有技术中通常采用车辆参数辨识方法对车辆参数进行辨识。然而,现有的车辆参数辨识方法大多是基于二轴车辆模型构建的,缺少针对三轴车辆的车辆参数辨识方法,导致难以对三轴车辆的车辆参数进行准确辨识。
技术实现思路
1、有鉴于此,本技术实施例提供了一种车辆参数辨识方法、装置、计算机可读存储介质及车辆,以解决现有技术中缺少针对三轴车辆的车辆参数辨识方法,导致难以对三轴车辆的车辆参数进行准确辨识的问题。
2、本技术实施例的第一方面提供了一种车辆参数辨识方法,可以包括:
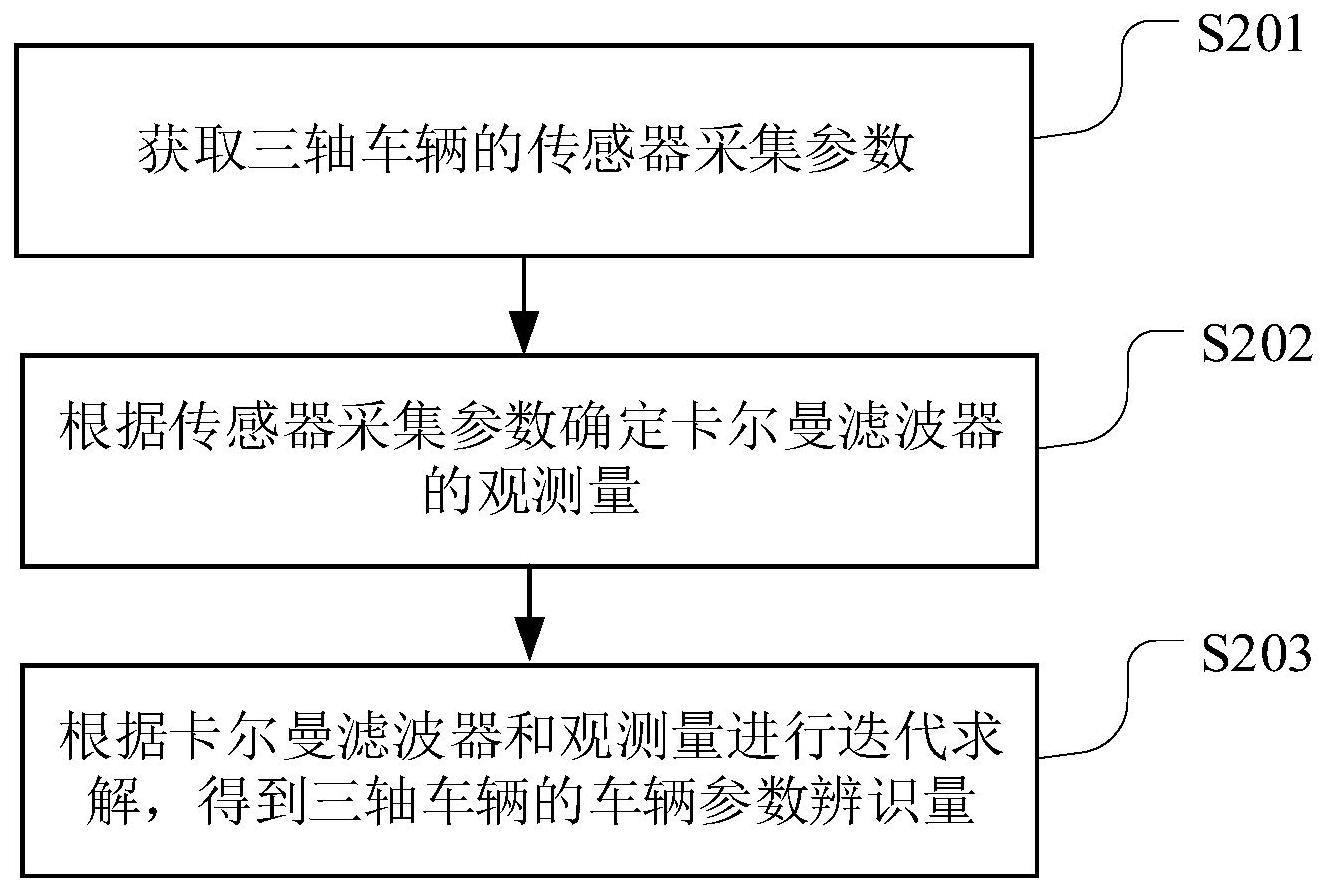
3、获取三轴车辆的传感器采集参数;
4、根据所述传感器采集参数确定卡尔曼滤波器的观测量;其中,所述卡尔曼滤波器为基于预设的三轴车辆动力学模型构建得到;
5、根据所述卡尔曼滤波器和所述观测量进行迭代求解,得到所述三轴车辆的车辆参数辨识量。
6、在第一方面的一种具体实现方式中,所述根据所述传感器采集参数确定卡尔曼滤波器的观测量,可以包括:
7、对所述传感器采集参数进行时间同步处理,得到同步传感器采集参数;
8、根据所述同步传感器采集参数确定所述观测量。
9、在第一方面的一种具体实现方式中,所述对所述传感器采集参数进行时间同步处理,得到同步传感器采集参数,可以包括:
10、确定与目标时刻对应的第一采集时刻和第二采集时刻;其中,所述目标时刻为所述卡尔曼滤波器进行迭代计算的时刻,所述第一采集时刻为在所述目标时刻之前的与所述目标时刻最近的参数采集时刻,所述第二采集时刻为在所述目标时刻之后的与所述目标时刻最近的参数采集时刻;
11、根据所述第一采集时刻和所述第二采集时刻确定与所述目标时刻对应的插值系数;
12、根据所述插值系数对所述传感器采集参数进行插值计算,得到同步传感器采集参数。
13、在第一方面的一种具体实现方式中,所述传感器采集参数可以包括第一传感器采集参数和第二传感器采集参数;
14、所述获取三轴车辆的传感器采集参数,可以包括:
15、获取所述三轴车辆的惯性测量单元采集的第一传感器采集参数;
16、获取所述三轴车辆的方向盘转角传感器采集的第二传感器采集参数。
17、在第一方面的一种具体实现方式中,所述根据所述卡尔曼滤波器和所述观测量进行迭代求解,得到所述三轴车辆的车辆参数辨识量,可以包括:
18、根据第k次迭代的后验估计结果、第k次迭代的后验估计协方差、所述卡尔曼滤波器的状态转移矩阵,确定第k+1次迭代的先验估计结果和第k+1次迭代的先验估计协方差;
19、根据第k+1次迭代的先验估计结果、第k+1次迭代的先验估计协方差、所述卡尔曼滤波器的观测矩阵和所述观测量,确定第k+1次迭代的后验估计结果和第k+1次迭代的后验估计协方差;
20、根据第k+1次迭代的后验估计协方差判断第k+1次迭代的后验估计结果是否达到收敛状态;
21、若第k+1次迭代的后验估计结果未达到收敛状态,则继续进行下一次迭代求解;
22、若第k+1次迭代的后验估计结果达到收敛状态,则根据第k+1次迭代的后验估计结果确定所述车辆参数辨识量。
23、在第一方面的一种具体实现方式中,所述根据第k+1次迭代的先验估计结果、第k+1次迭代的先验估计协方差、所述卡尔曼滤波器的观测矩阵和所述观测量,确定第k+1次迭代的后验估计结果和第k+1次迭代的后验估计协方差,可以包括:
24、根据第k+1次迭代的先验估计结果、第k次迭代的卡尔曼增益、所述观测矩阵和所述观测量,确定第k+1次迭代的后验估计结果;
25、根据第k+1次迭代的先验估计协方差和所述观测矩阵,确定第k+1次迭代的卡尔曼增益;
26、根据第k+1次迭代的先验估计协方差、第k+1次迭代的卡尔曼增益和所述观测矩阵,确定第k+1次迭代的后验估计协方差。
27、在第一方面的一种具体实现方式中,所述观测量可以包括:车身纵向速度、等效轴距、车身旋转角速度、车身横滚角、前轮转角;
28、所述车辆参数辨识量可以包括:前轴轮胎侧偏刚度、中轴轮胎侧偏刚度、后轴轮胎侧偏刚度、等效轴距、中轴到质心的距离、横摆转动惯量、方向零偏角。
29、本技术实施例的第二方面提供了一种车辆参数辨识装置,可以包括:
30、参数获取模块,用于获取三轴车辆的传感器采集参数;
31、观测量确定模块,用于根据所述传感器采集参数确定卡尔曼滤波器的观测量;其中,所述卡尔曼滤波器为基于预设的三轴车辆动力学模型构建得到;
32、迭代求解模块,用于根据所述卡尔曼滤波器和所述观测量进行迭代求解,得到所述三轴车辆的车辆参数辨识量。
33、在第二方面的一种具体实现方式中,所述参数获取模块可以包括:
34、同步处理单元,用于对所述传感器采集参数进行时间同步处理,得到同步传感器采集参数;
35、观测量确定单元,用于根据所述同步传感器采集参数确定所述观测量。
36、在第二方面的一种具体实现方式中,所述同步处理单元可以包括:
37、采集时刻确定子单元,用于确定与目标时刻对应的第一采集时刻和第二采集时刻;其中,所述目标时刻为所述卡尔曼滤波器进行迭代计算的时刻,所述第一采集时刻为在所述目标时刻之前的与所述目标时刻最近的参数采集时刻,所述第二采集时刻为在所述目标时刻之后的与所述目标时刻最近的参数采集时刻;
38、插值系数确定子单元,用于根据所述第一采集时刻和所述第二采集时刻确定与所述目标时刻对应的插值系数;
39、插值计算子单元,用于根据所述插值系数对所述传感器采集参数进行插值计算,得到同步传感器采集参数。
40、在第二方面的一种具体实现方式中,所述传感器采集参数包括第一传感器采集参数和第二传感器采集参数;
41、所述参数获取模块,可以包括:
42、第一参数获取单元,用于获取所述三轴车辆的惯性测量单元采集的第一传感器采集参数;
43、第二参数获取单元,用于获取所述三轴车辆的方向盘转角传感器采集的第二传感器采集参数。
44、在第二方面的一种具体实现方式中,所述迭代求解模块可以包括:
45、先验估计确定单元,用于根据第k次迭代的后验估计结果、第k次迭代的后验估计协方差、所述卡尔曼滤波器的状态转移矩阵,确定第k+1次迭代的先验估计结果和第k+1次迭代的先验估计协方差;
46、后验估计确定单元,用于根据第k+1次迭代的先验估计结果、第k+1次迭代的先验估计协方差、所述卡尔曼滤波器的观测矩阵和所述观测量,确定第k+1次迭代的后验估计结果和第k+1次迭代的后验估计协方差;
47、收敛判断单元,用于根据第k+1次迭代的后验估计协方差判断第k+1次迭代的后验估计结果是否达到收敛状态;
48、迭代求解单元,用于若第k+1次迭代的后验估计结果未达到收敛状态,则继续进行下一次迭代求解;
49、辨识量确定单元,用于若第k+1次迭代的后验估计结果达到收敛状态,则根据第k+1次迭代的后验估计结果确定所述车辆参数辨识量。
50、在第二方面的一种具体实现方式中,所述后验估计单元可以包括:
51、后验估计结果确定子单元,用于根据第k+1次迭代的先验估计结果、第k次迭代的卡尔曼增益、所述观测矩阵和所述观测量,确定第k+1次迭代的后验估计结果;
52、卡尔曼增益确定子单元,用于根据第k+1次迭代的先验估计协方差和所述观测矩阵,确定第k+1次迭代的卡尔曼增益;
53、后验估计协方差确定子单元,用于根据第k+1次迭代的先验估计协方差、第k+1次迭代的卡尔曼增益和所述观测矩阵,确定第k+1次迭代的后验估计协方差。
54、在第二方面的一种具体实现方式中,所述观测量可以包括:车身纵向速度、等效轴距、车身旋转角速度、车身横滚角、前轮转角;
55、所述车辆参数辨识量可以包括:前轴轮胎侧偏刚度、中轴轮胎侧偏刚度、后轴轮胎侧偏刚度、等效轴距、中轴到质心的距离、横摆转动惯量、方向零偏角。
56、本技术实施例的第三方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述任一种车辆参数辨识方法的步骤。
57、本技术实施例的第四方面提供了一种车辆,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任一种车辆参数辨识方法的步骤。
58、本技术实施例的第五方面提供了一种计算机程序产品,当计算机程序产品在车辆上运行时,使得车辆执行上述任一种车辆参数辨识方法的步骤。
59、本技术实施例与现有技术相比存在的有益效果是:本技术实施例获取三轴车辆的传感器采集参数;根据所述传感器采集参数确定卡尔曼滤波器的观测量;其中,所述卡尔曼滤波器为基于预设的三轴车辆动力学模型构建得到;根据所述卡尔曼滤波器和所述观测量进行迭代求解,得到所述三轴车辆的车辆参数辨识量。通过本技术实施例,可以预先针对三轴车辆构建三轴车辆动力学模型和对应的卡尔曼滤波器,迭代求解得到三轴车辆的车辆参数辨识量,实现了对三轴车辆的车辆参数的准确辨识。
- 还没有人留言评论。精彩留言会获得点赞!