一种基于人体运动状态识别的行人航迹推算方法
本发明属于惯性导航,涉及一种基于人体运动状态识别的行人航迹推算方法。
背景技术:
1、行人航迹推算(pdr)的原理是通过imu的加速度计、陀螺仪和磁力计的传感器数据推算出行人实时行进步长与行进方向,并通过累积的方式来计算出当前位置,从而实现定位。随着微机电系统(micro-electro-mechanical system,mems)的快速发展,成本低、尺寸小、耗能低及易集成的imu逐渐受到重视,基于imu的行人导航成为了研究热点。基于imu的定位系统不需要提前获取未知环境的信息,也不需要在定位区域部署其它硬件设备,在解决火灾、地震等应急灾害救援领域,具有重要的应用价值。
2、目前对于如何提高行人定位导航的精度的问题,大多数研究主要集中在减小imu的测量误差上面,对于行人的运动状态研究较少。pdr算法的原理是在已知行人初始位置的前提下,通过实时获取的加速度计和陀螺仪的数据,判断行人是否跨出一步,然后计算出行人的步长和航向角,从而通过累积得到行人当前位置信息。常规的pdr算法在行人跑步、行走+跑步混合等运动状态下定位效果不理想。本方法在已有的研究基础上,提出一种基于人体运动状态识别的行人航迹推算方法。通过分析行人行走状态和跑步状态下对应的加速度峰值,从而设置不同的加速度阈值和时间窗口来改进原有的峰值检测算法进行计步检测,同时对于不同的运动状态,采用自适应步长计算公式,以减小pdr算法的整体定位误差。实验结果表明,该算法在行人行走状态、跑步状态和行走+跑步状态下都达到了较好的定位效果。
3、cn113239803a,一种基于行人运动状态识别的航迹推算定位方法,包括步骤:构建行人运动状态识别分类模型、识别行人运动状态、进行步频检测、步长估计、航向估计和航迹推算。本发明的有益效果在于:针对行人在二维空间内的运动状态,采集五类运动状态且仅采集三轴加速度和三轴陀螺仪数据实现行人导航定位,航迹推算方法的实用性更强,更加有利于实际应用环境的应用和开发。五类运动状态识别模型建模和使用模型识别运动状态更加完善且精准。步态检测和步频检测无需根据运动状态行为而改变检测方法,更加通用且准确,最大程度降低与人体运动状态识别方法的耦合性。航迹推算能够接受更为复杂的运动状态种类,适用性更强。
4、该专利中的方法需要获得足够的步态数据用于训练步态模型,还需要处理五类运动状态的时域特征和建立有效特征矩阵,算法复杂度较高,对硬件的处理能力要求较高,难以在实际应用中普及;运动状态分类太多,容易出现误判,从而导致误差变大。本发明的算法不需要提前获取步态数据,对于运动状态的分类是基于加速度阈值和时间窗口阈值,时间复杂度和空间复杂度较底,硬件开销很小。
技术实现思路
1、本发明旨在解决以上现有技术的问题。提出了一种基于人体运动状态识别的行人航迹推算方法。本发明的技术方案如下:
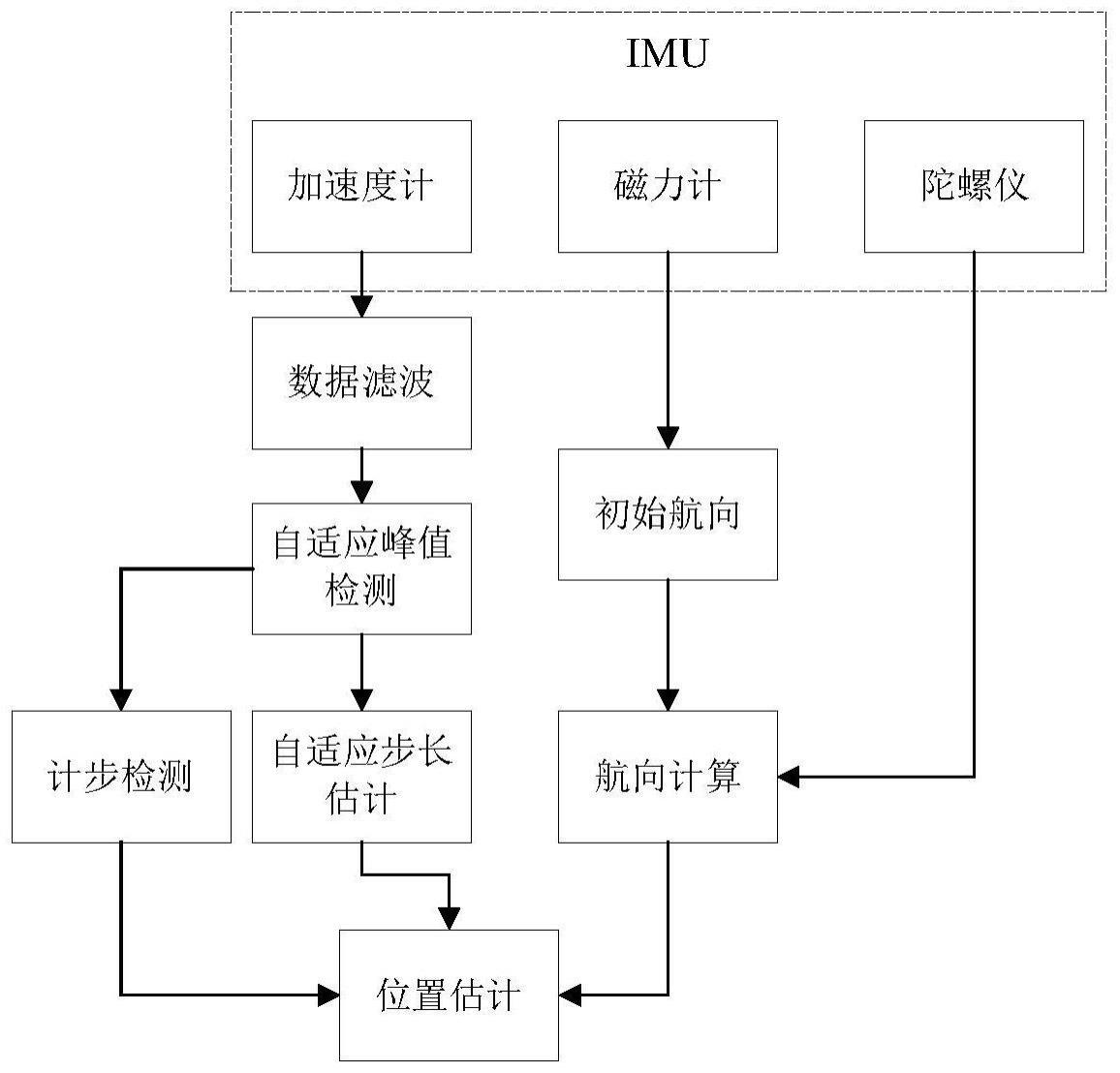
2、一种基于人体运动状态识别的行人航迹推算方法,其包括以下步骤:
3、步骤a,将imu佩戴于行人腰部,在行人运动过程中实时获取加速度计和陀螺仪的数据,并对数据进行预处理;
4、步骤b,利用采集的运动数据,使用自适应峰值检测算法对行人的运动状态进行分类及计步检测,利用航向推算模型计算航向;
5、步骤c,根据行人所处的不同运动状态,使用自适应步长估计拟合行人的实际运动步长;
6、步骤d,根据计步检测和步长估计,实时获取行人运动过程中的位置信息。
7、进一步的,所述步骤a中对数据进行预处理具体包括:
8、将采集的三轴加速度数据按下式合并得到合加速度模值:
9、
10、式中,ax、ay、az为采集的三轴加速度值;
11、对于原始数据的预处理,消除各种噪声,并尽量多地保留原始数据的特征;采用移动均值滤波法对合加速度数据进行预处理,窗口大小为5。
12、进一步的,所述步骤b,利用采集的运动数据,使用自适应峰值检测算法对行人的运动状态进行分类及计步检测,利用航向推算模型计算航向,具体包括:
13、峰值检测法是利用人体行走时加速度信号呈现类似正弦波的特点,当检测到波峰时就认为行人走了一步,记录波峰时刻,如下式所示:
14、
15、式中,s表示标记为加速度峰值的时刻集合,和分别表示tpeak-k和tpeak+k时刻加速度的大小,其中,k为波峰的条件参数;
16、峰值检测法设立一个阈值,只有当峰值加速度值大于该阈值,才会视为行人走了一步;如下式所示:
17、
18、将行人的运动状态分为行走、静止和跑步三种,根据加速度峰值不同提出自适应峰值检测算法;
19、pdr中的航向计算主要依赖于航向推算模型,即
20、
21、其中,和分别是t-1与t时刻的航向,初始航向由磁力计的信息进行初始校准;δt是陀螺仪数据的间隔时间;∑ω是t-1到t时刻陀螺仪输出的角速度之和。
22、进一步的,所述步骤c中,根据行人所处的不同运动状态,使用自适应步长估计拟合行人的实际运动步长,具体包括:
23、采用线性和非线性步长模型融合的方式来估计步长;对于行走状态,采用式(5)的线性步长模型来估计步长;对于跑动状态,采用式(8)所示由加速度最大值和最小值决定的weinberg非线性步长模型;
24、sk=a+b×lfk+c×lvk (5)
25、式中,参数a、b、c为常数,lfk和lvk分别为第k步的步频和加速度方差,其计算公式如下:
26、
27、
28、其中,tk和tk+1分别是第k步的起始时刻和终止时刻,at为t时刻的加速度,为第k步的平均加速度,nk表示第k步所包含的加速度的采样个数;
29、
30、式中,k为常数,amax和amin表示单步加速度的最大值和最小值;
31、结合式(5)和式(8),提出了一种自适应步长估计算法,用于满足正常行走和跑步这两种行走模式下的精确计步,如下所示:
32、
33、本发明的优点及有益效果如下:
34、本发明公开了一种基于人体运动状态识别的行人航迹推算方法,其创新点、优点及有益效果在于:
35、1、提出对原始数据进行预处理,消除了噪声的干扰和原始的加速度值在波峰附近会出现的伪波峰,从而避免了误判,提高了计步检测的准确度。
36、2、通过分析行人行走状态和跑步状态下对应的加速度峰值,从而设置不同的加速度阈值和时间窗口来改进原有的峰值检测算法进行计步检测,同时对于不同的运动状态,采用自适应步长计算公式,以减小pdr算法的整体定位误差。实验结果表明,该方法在行人行走状态、跑步状态和行走+跑步状态下都达到了较好的定位效果。
37、本发明的创新主要有:步骤a中的数据预处理,采用移动均值滤波,消除了噪声的干扰和原始的加速度值在波峰附近会出现的伪波峰,从而避免了误判,提高了计步检测的准确度;步骤b的自适应峰值检测算法,对每一步产生的最大加速度进行阈值判断,实现运动状态的分类。根据行走状态与跑步状态对应的参数设置阈值,改变邻域窗口,实现不同运动状态的自适应判断和准确计步。算法对传感器姿态和行人运动状态的适应性很好,实现多种传感器姿态下计步准确率均达到99%以上,弥补了常规波峰检测关算法无法进行非正常态计步的不足;步骤c中的自适应步长估计模型,根据行人所处的不同运动状态,实时调整每一步的估计值,从而提高定位的准确度。
- 还没有人留言评论。精彩留言会获得点赞!