一种基于环境信息的建筑物面要素匹配方法及系统
本发明属于地理信息科学领域,特别是涉及一种基于环境信息的建筑物面要素匹配方法及系统。
背景技术:
1、要素匹配是空间数据处理和应用领域的基础性技术,它广泛应用于地理空间数据的更新、维护和融合。近年来,“自发地理信息”(vgi)已成为可能,它是以web2.0、移动智能终端、定位技术(gps或北斗)、位置服务(location based service,lbs)技术和开放的高分辨率遥感影像以及个人空间认知的地理知识为基础,由非专业测绘人员自发(自愿)参与创建并分享的地理信息的新方式。与传统的专业测绘数据相比,vgi具有语义信息丰富、现势强、获取成本低等优点。要素匹配又成为vgi质量评价和基于vgi的数据更新的关键技术。
2、传统要素匹配方法主要用于解决待匹配数据之间存在位置偏移和不同细节层次(lod)的问题。然而,基于vgi的匹配方法面临着新的挑战。首先,vgi数据的lod不统一,其因对象异;其次,vgi数据的位置精度不稳定;最后,志愿者们是独立于更新周期创建vgi。相比之下,权威地理空间数据具有定义良好的生产和更新规范,这保证了数据具有严格的度量精度。因此传统的要素匹配方法难以直接用于vgi匹配对象的识别,对现有的匹配方法进行改进是必然的。
3、为此在2018年提出了mbr组合优化算法,它较好的解决了传统匹配中位置偏移和不同lod的问题。然而,典型的mbr组合优化算法也存在不足:(1)它需要设置一个相似性阈值,但是vgi的数据质量在空间分布上不均衡,通过一个固定的阈值来发现所有的正确匹配对是不切实际的;(2)它不能区分相邻的相似形状的建筑物,但在城市中存在许多相邻相似形状的建筑物,例如一个小区的住宅楼或学校的宿舍楼,它们具有高度相似的形状。因此,需要对mbr组合优化算法进一步改进以满足精度较低的空间数据匹配的需求。
技术实现思路
1、本发明提供一种基于环境信息的建筑物面要素匹配方法及系统,用以解决现有技术中无法正确识别匹配对的问题。
2、一方面为实现上述目的,本发明提供一种基于环境信息的建筑物面要素匹配方法,包括:
3、从两个待匹配的建筑物面要素集中获取潜在匹配对;
4、计算每对潜在匹配对之间的初始概率,基于所述初始概率构建初始概率矩阵;
5、定义每对潜在匹配对的邻域对象,计算每对潜在匹配对与其邻域匹配对之间的兼容系数;根据所述兼容系数迭代更新所述初始概率矩阵p,直到两次迭代之间的概率差异小于预设阈值,迭代停止,获得最终的匹配结果。
6、可选地,计算每对潜在匹配对之间的初始概率,基于所述初始概率构建初始概率矩阵p的过程包括,
7、对于每一对潜在匹配对(a1,a2,..,ai:b1,b2,..,bj),将{a1,a2,..,ai}和{b1,b2,..,bj}视为聚合多边形,分别表示为ai和bj,则bj是ai的候选匹配对象,定义为bj∈c(ai),c(ai)表示为ai潜在匹配对象集合;将所有潜在匹配关系表示为mi:j={(ai:bj)|i=1,2,...,p;j=1,2,...,q}后,建立初始概率矩阵p。
8、可选地,所述初始概率矩阵p的计算公式为:
9、
10、其中,m(ai)是向量(δx,δy)平移多边形ai的函数,((δx,δy)是mbr(ai)和mbr(bj)质心坐标之间的偏差;
11、mbr质心坐标计算公式如下:
12、x0=(xmax-xmin)/2,
13、y0=(ymax-ymin)/2,
14、(xmin,ymin)和(xmax,ymax)分别是mbr的最小和最大坐标。
15、可选地,所述调节系数α的计算公式为:
16、
17、其中,和分别表示ai和bj中所有面要素轮廓点的总和。
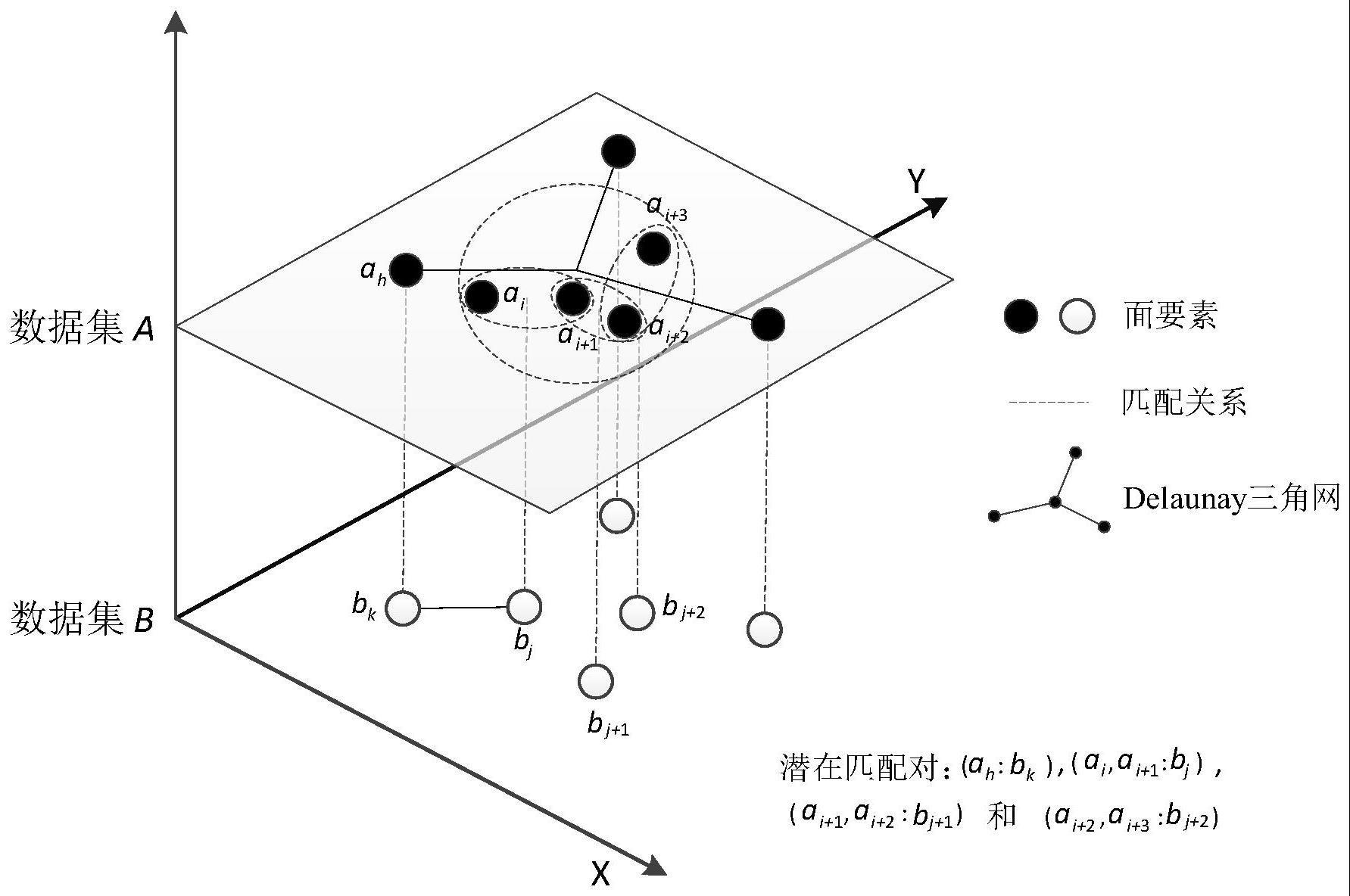
18、可选地,所述定义每对潜在匹配对的邻域对象的过程包括:通过递归在潜在匹配对对应表中查找到与ai有关的所有潜在匹配对;
19、假设检测到:
20、(ai:bj)=(ai,ai+1:bj),(ai+1:bj+1)=(ai+1,ai+2:bj+1)和(ai+2:bj+2)=(ai+2,ai+3:bj+2),
21、则将:gai=ai∪ai+1∪ai+2={ai,ai+1,ai+2,ai+3};
22、提取mbr(gai)的几何中心点,以此类推,获取点集va;根据点集va建立delaunay三角网,表达式为gdt(a)=(va,ea),ea为三角网边的集合,mbr(ai)的几何中心点和mbr(ah)的几何中心点是由ea中任一一条边相连,则ai和ah互为邻居,ah是ai的邻域集合中的元素;
23、ai的邻域定义为:n(ai)={ah|(ai,ah)∈ea}
24、其中,n(ai)表示为ai的邻域集合,定义:
25、n(ai)=n(ai+1)=n(ai+2)=n(gai);
26、bj的邻域定义为:
27、
28、其中,n(bj)表示为bj的邻域集合,bj∈c(ai)表示为bj和ai是潜在匹配对,表示bj和bk不包含同一要素,bk∈c(ah)表示为bk和ah是潜在匹配对,(ai,ah)∈ea表示ai和ah是邻居。
29、可选地,计算每对潜在匹配对与其邻域匹配对之间的兼容系数的过程包括:通过距离相似度和面积重叠率定义兼容系数,基于所述兼容系数在每次迭代中消除正确匹配对之间的歧义;
30、设(ai:bj)和(ah:bk)是相邻的潜在匹配对,则(ai:bj)和(ah:bk)之间的兼容系数计算如下:
31、c(ai,bj;ah,bk)=rdis(ai,bj;ah,bk)×roverlaparea(ai,bj;ah,bk)
32、其中,相对距离rdis(ai,bj;ah,bk)计算公式如下:
33、
34、其中,dis(ai,bj)表示ai和bj之间的距离,计算公式如下:
35、
36、其中,和分别表示mbr(ai)和mbr(bj)的质心点坐标;
37、(ai:bj)和(ah:bk)的相对面积重叠率roverlaparea(ai,bj;ah,bk)的计算公式如下:
38、
39、其中,m(ai)是向量(δx,δy)平移多边形ai的函数,α为调节系数。
40、可选地,根据所述兼容系数迭代更新所述初始概率矩阵p,直到两次迭代之间的概率差异小于预设阈值,迭代停止,获得最终的匹配结果的过程包括,
41、在每一次迭代更新概率矩阵中,(ai:bj)从其的邻域中获得全部支持,支持函数计算公式如下:
42、
43、最后,根据计算得到的支持度更新概率矩阵,其计算公式为,
44、
45、每次迭代更新后保持
46、当两次迭代之间min(p(t+1)(ai:bj)-p(t)(ai:bj))<0.001,则迭代终止;对于ai,bj∈c(ai),如果p(ai:bj)=max,则(ai:bj)为最终的匹配结果。
47、为了实现上述目的,本发明还提供了一种基于环境信息的建筑物面要素匹配系统,包括:
48、数据获取模块,用于从两个待匹配的面要素集中获取潜在匹配对;
49、计算模块,用于计算每对潜在匹配对之间的初始概率,基于所述初始概率构建初始概率矩阵,其中,需要通过调节系数α来平衡同名面要素之间的面积重叠率的误差;
50、匹配模块,用于定义每对潜在匹配对的邻域对象,计算每对潜在匹配对与其邻域匹配对之间的兼容系数;还用于根据所述兼容系数迭代更新所述初始概率矩阵,直到两次迭代之间的概率差异小于预设阈值,迭代停止,获得最终的匹配结果。
51、本发明公开了以下技术效果:
52、本发明提供的一种基于环境信息的建筑物面要素匹配方法及系统,通过改进最小边界矩形组合优化(mbr组合优化)算法,解决了位置差异、lod差异、阈值设置和自动化匹配的问题,在数据质量更低的vgi数据匹配中也取得了较好的结果。具体地,该方法具有以下优点:(1)避免了相似度阈值和权重的设置,且不需要训练样本,该过程是基于空间上下文信息和优化算法实现的;(2)克服了mbr组合优化算法无法区分形状相似的相邻建筑物的缺点;(3)针对mbr组合优化算法获取大量无效的潜在匹配对情况下,优化了概率松弛算法中邻域和兼容系数的定义以适应所面对的新情况。
- 还没有人留言评论。精彩留言会获得点赞!