基于时域模型修正的海上风机土结相互作用状态识别方法
本发明涉及海上风机,具体涉及一种基于时域模型修正的海上风机土结相互作用状态识别方法。
背景技术:
1、海上风机在风、浪、流和风轮转动等动力荷载作用下,其土结相互作用将会随时间变化。而土结相互作用对海上风机结构整体的动力特性影响较大,若不能实时掌握海上风机土结相互作用状态,则无法对海上风机的安全状态进行准确评估,从而导致海上风机事故的发生。
2、海上风机的结构健康状态常采用监测系统和检测仪器进行识别,但海上风机基础一般处于海平面以下,且被土壤覆盖。针对海上风机结构健康监测,目前已有的大部分海上风机未在基础上安装传感器以监测海上风机的土结相互作用状态,因此,难以对海上风机的安全状态进行准确评估。且采用传统的结构健康监测和检测手段难以准确识别海上风机土结相互作用。故采用传统的监测检测手段难以识别海上风机的结构健康状态。
3、因此,现有技术还有待于改进和发展。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种基于时域模型修正的海上风机土结相互作用状态识别方法,旨在解决现有技术中采用传统的监测检测手段难以识别海上风机的结构健康状态的问题。
2、本发明解决技术问题所采用的技术方案如下:
3、第一方面,本发明提供一种基于时域模型修正的海上风机土结相互作用状态识别方法,其中,所述方法包括:
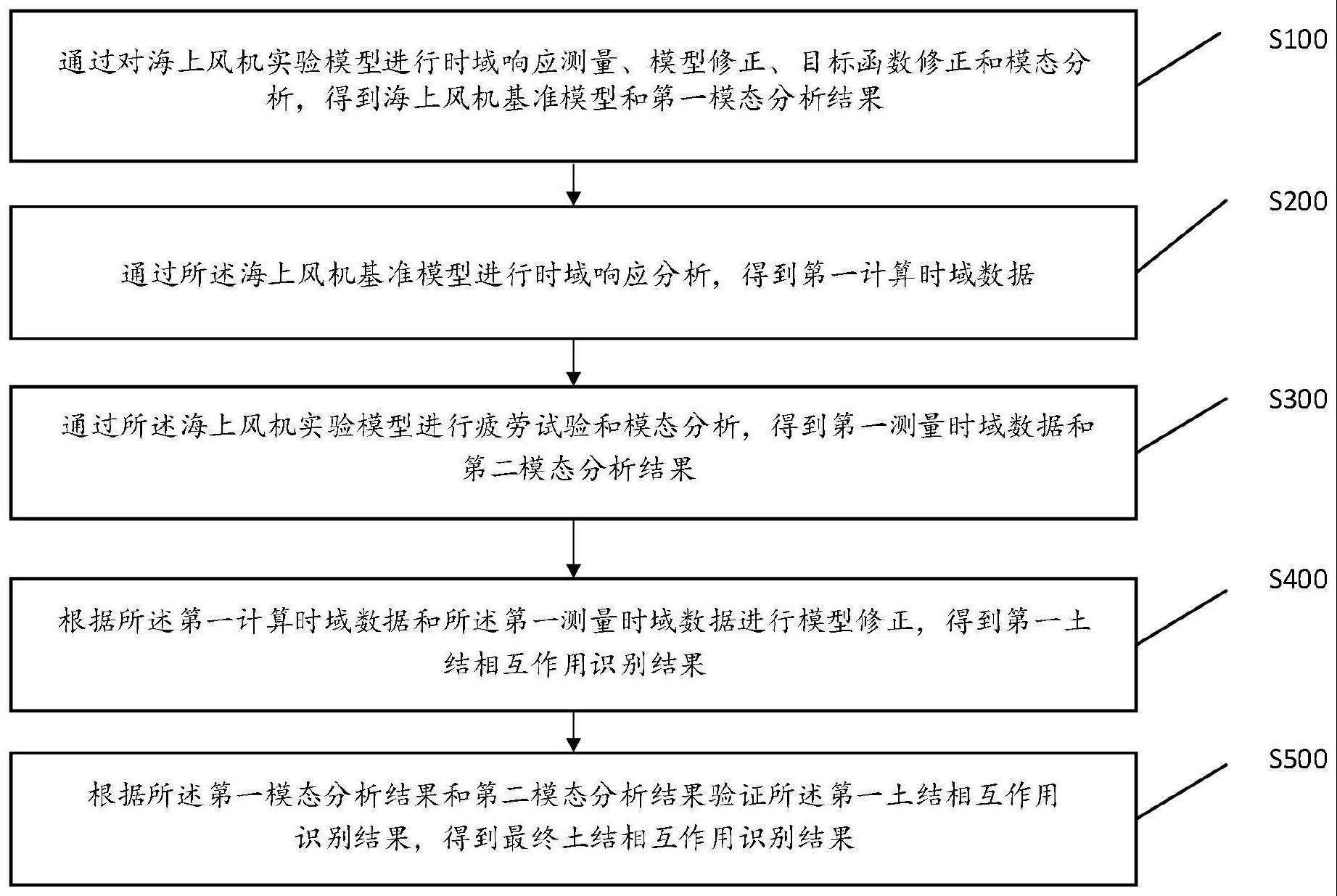
4、通过对海上风机实验模型进行时域响应测量、模型修正和模态分析,得到海上风机基准模型和第一模态分析结果;
5、通过所述海上风机基准模型进行土结相互作用状态识别,得到第一计算时域数据;
6、通过所述海上风机实验模型进行疲劳试验和模态分析,得到第一测量时域数据和第二模态分析结果;
7、根据所述第一计算时域数据和所述第一测量时域数据进行模型修正,得到第一土结相互作用识别结果;
8、根据所述第一模态分析结果和第二模态分析结果验证所述第一土结相互作用识别结果,得到最终土结相互作用识别结果。
9、在一种实现方式中,所述通过对海上风机实验模型进行时域响应测量、模型修正和模态分析,得到海上风机基准模型和第一模态分析结果,包括:
10、根据所述海上风机实验模型建立基准有限元模型;其中,所述基准有限元模型的土结相互作用采用非线性弹簧和阻尼器进行模拟;
11、通过所述基准有限元模型进行时域分析,得到第二计算时域数据;
12、通过所述海上风机实验模型进行第一次模态分析,得到第二测量时域数据和第一模态分析结果;
13、根据所述第二计算时域数据和所述第二测量时域数据建立第一模型修正目标函数;
14、根据所述第一模型修正目标函数对所述基准有限元模型的参数进行修正,得到所述海上风机基准模型;其中,所述参数包括材料参数、非线性弹簧参数、阻尼器参数和瑞丽阻尼参数。
15、在一种实现方式中,所述根据所述第一计算时域数据和所述第一测量时域数据进行模型修正,得到第一土结相互作用识别结果,包括:
16、根据所述第一计算时域数据和所述第一测量时域数据建立第二模型修正目标函数;
17、根据所述第二模型修正目标函数对所述基准有限元模型的非线性弹簧参数和阻尼器参数进行修正,得到第二次修正后非线性弹簧参数和阻尼器参数;
18、将所述第二次修正后非线性弹簧参数和阻尼器参数作为所述第一土结相互作用识别结果。
19、在一种实现方式中,所述根据所述第一计算时域数据和所述第一测量时域数据建立第二模型修正目标函数,包括:
20、根据所述第一计算时域数据和所述第一测量时域数据的极值以及所述极值对应的时间,得到第二模型修正目标函数。
21、在一种实现方式中,所述根据所述第一模态分析结果和第二模态分析结果验证所述第一土结相互作用识别结果,得到最终土结相互作用识别结果,包括:
22、将所述第一模态分析结果和第二模态分析结果中的频率参数和阻尼参数进行比较,得到所述模态参数的变化趋势;
23、将所述基准有限元模型的非线性弹簧参数和阻尼器参数与所述第二次修正后非线性弹簧参数和阻尼器参数的进行比较,得到所述非线性弹簧参数和阻尼器参数的变化趋势。
24、在一种实现方式中,所述根据所述第一模态分析结果和第二模态分析结果验证所述第一土结相互作用识别结果,得到最终土结相互作用识别结果,包括:
25、若所述模态参数的变化趋势和非线性弹簧参数和阻尼器参数变化趋势一致,则将所述第一土结相互作用识别结果作为所述最终土结相互作用识别结果;
26、若所述模态参数的变化趋势和非线性弹簧参数和阻尼器参数变化趋势不一致,则重新执行所述根据所述第二模型修正目标函数对所述基准有限元模型的非线性弹簧参数和阻尼器参数进行修正,得到第二次修正后非线性弹簧参数和阻尼器参数的步骤。
27、在一种实现方式中,所述方法还包括基于人工生态系统的优化算法aeo对所述基准有限元模型和所述海上风机基准模型进行修正。
28、第二方面,本发明实施例还提供一种基于时域模型修正的海上风机土结相互作用状态识别装置,其中,所述装置包括:
29、海上风机基准模型建立模块,用于通过对海上风机实验模型进行时域响应测量、模型修正和模态分析,得到海上风机基准模型和第一模态分析结果;
30、第一计算时域数据获取模块,用于通过所述海上风机基准模型进行土结相互作用状态识别,得到第一计算时域数据;
31、第一测量时域数据获取模块,用于通过所述海上风机实验模型进行疲劳试验和模态分析,得到第一测量时域数据和第二模态分析结果;
32、第一土结相互作用识别结果获取模块,用于根据所述第一计算时域数据和所述第一测量时域数据进行模型修正,得到第一土结相互作用识别结果;
33、最终土结相互作用识别结果获取模块,用于根据所述第一模态分析结果和第二模态分析结果验证所述第一土结相互作用识别结果,得到最终土结相互作用识别结果。
34、第三方面,本发明实施例还提供一种智能终端,其中,所述智能终端包括存储器、处理器及存储在所述存储器中并可在所述处理器上运行的基于时域模型修正的海上风机土结相互作用状态识别程序,所述处理器执行所述基于时域模型修正的海上风机土结相互作用状态识别程序时,实现如以上任一项所述的基于时域模型修正的海上风机土结相互作用状态识别方法的步骤。
35、第四方面,本发明实施例还提供一种计算机可读存储介质,其中,所述计算机可读存储介质上存储有基于时域模型修正的海上风机土结相互作用状态识别程序,所述基于时域模型修正的海上风机土结相互作用状态识别程序被处理器执行时,实现如以上任一项所述的基于时域模型修正的海上风机土结相互作用状态识别方法的步骤。
36、有益效果:与现有技术相比,本发明提供了一种基于时域模型修正的海上风机土结相互作用状态识别方法。本发明首先通过对海上风机实验模型进行时域响应测量、模型修正得到海上风机基准模型,并进行第一模态分析。再通过所述海上风机基准模型进行土结相互作用状态识别,得到第一计算时域数据。然后,通过所述海上风机实验模型进行疲劳试验和模态分析,得到第一测量时域数据和第二模态分析结果。接着通过对第一计算时域数据和第一测量时域数据进行模型修正,得到第一土结相互作用识别结果。最后,根据两次模态分析的结果对第一土结相互作用识别结果进行验证,以得到最终土结相互作用识别结果,从而通过建立海上风机基准模型对海上风机的结构健康状态进行模拟检测,解决了土结相互作用状态直接测量难度大的问题。
- 还没有人留言评论。精彩留言会获得点赞!