一种基于图像识别与TOPSIS综合评价的驾驶风格分类方法
本发明涉及智能驾驶,特别涉及一种基于图像识别与topsis综合评价的驾驶风格分类方法。
背景技术:
1、随着汽车工业和人工智能的发展,汽车在人们生活中的地位越来越高,对自动驾驶和智能网联汽车的研究也越来越多。根据美国汽车工业协会(sae)提出的自动驾驶等级分类标准,汽车的自动化程度从l0(no driving automation)级别到l5(full drivingautomation)级别的发展过程中,由于当前技术发展的限制,目前市面上可以进行商用的基本为l2(partial driving automation)级别自动驾驶汽车,因此目前大量的研究指向l3(conditional driving automation)级别驾驶。在l3级别的驾驶研究中,大部分的研究者认为研究驾驶权的分配是一个可行的方向。
2、在驾驶权的分配问题上,驾驶风格分类方式的研究对其产生至关重要的作用,驾驶风格的分类可以作为驾驶权分配模型的输入端对驾驶权模型进行优化和修正,使得驾驶权分配模型更加智能化和人性化。对于驾驶风格分类而言,早期的研究主要是通过问卷调查等主观的方式进行专家打分和人为分类。随着计算机网络技术的发展,目前大部门的研究基本在通过分析汽车车辆的数据(其中最为常见的为汽车的加速度数据)来进行分类。也有研究者使用卷积神经网络的机器学习方式对数据进行处理和分类,但是在以往的研究中并没有将驾驶过程中的常规驾驶和操作事件进行区分讨论。
3、以往的研究和专利在对驾驶风格的数据来源上通常有使用网络公共数据集和采集车辆与驾驶人数据集两种,在数据的处理和分类方式上主要有传统统计分析的方法和使用机器学习的端到端分类方法,在对驾驶风格的分类种类上,部分研究者认为分为激进和正常即可,另外的部分研究者则认为应该分为激进、正常、谨慎三种,也有研究者认为再加入运动形成四种驾驶风格。或将其更加细致的分为了6种驾驶风格。另一方面,不乏有研究者将驾驶风格分为-1到+1之间的一个无级范围内,以使得其形成更细致的分类风格。
4、但是太多的分类种类不仅仅是带来计算的复杂度提升,同时也不利于模型的简化和高效,然而分成太少的2种风格则容易造成数据的丢失,造成较大的误差。
技术实现思路
1、本发明提供一种基于图像识别与topsis综合评价的驾驶风格分类方法,所述基于图像识别与topsis综合评价的驾驶风格分类方法包括以下步骤:
2、步骤1,进行驾驶员驾驶数据的收集,将驾驶数据分割为操作事件和常规驾驶,并进一步将每个操作事件分为多个分事件;所述分事件包括整个事件持续时间、油门踏板速度、油门踏板加速度、方向盘转角速度和方向盘转角加速度;
3、步骤2,根据操作事件持续时间设定驾驶风格,并使用kmeans一维聚类算法进一步对操作事件持续时间进行分类;
4、步骤3,通过模型获取操作事件中除操作事件持续时间各分事件和常规驾驶中各限速等级的驾驶风格;
5、步骤4,基于分事件下驾驶风格确认对应的操作事件的驾驶风格。
6、更近一步地,在步骤1中还包括以下步骤:
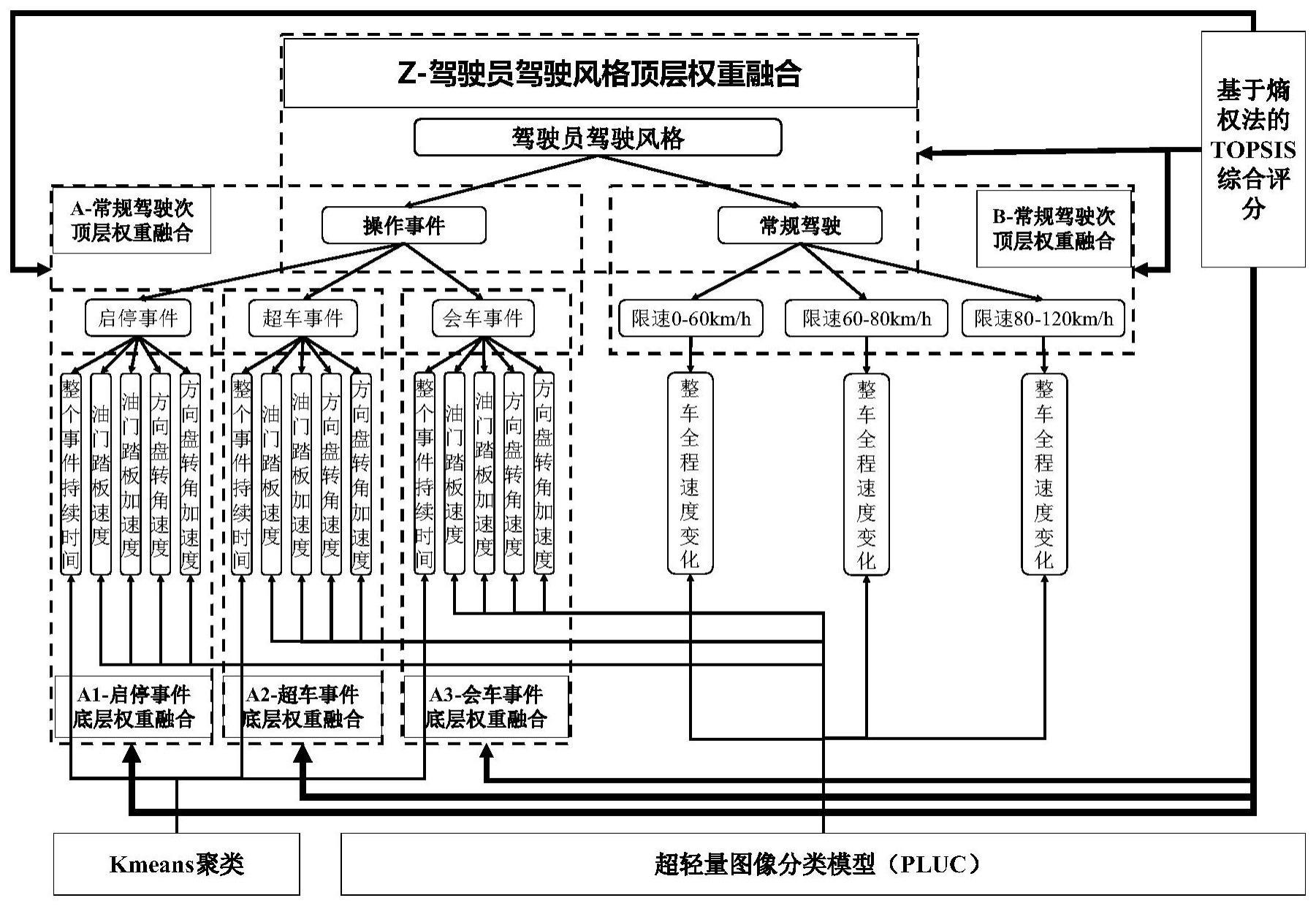
7、步骤1.1,通过数据分析统计的方式分类出整个驾驶过程中的常规驾驶路段和操作事件路段;其中操作事件进一步细分为在平时驾驶过程中极其常见的启停事件、超车事件和会车事件;常规事件定义为驾驶员在驾驶过程中没有进行相应的油门或者踏板操作,具体分为在某一段限速道路上0-60km/h、60-80km/h和80-120km/h三个限速模式下的汽车速度变化;
8、步骤1.2,将操作事件下的启停事件、超车事件和会车事件分别又进行细分,具体分为整个事件持续时间、油门踏板速度、油门踏板加速度、方向盘转角速度和方向盘转角加速度各5个分事件。
9、更近一步地,在步骤2中还包括以下步骤:
10、步骤2.1,根据激进型、正常型和谨慎型3种驾驶风格将数据分为3类,确定聚类算法的样本中心k值为3;
11、步骤2.2,从整个事件持续时间中持续的时间数据点中随机选择3个点,作为3个簇的初始样本中心;
12、步骤2.3,计算数据点与各样本中心之间的距离,并将最近的中心所在的簇作为该数据点所属的簇;
13、步骤2.4,计算每个簇的数据点的平均值,并将其作为新的样本中心;
14、步骤2.5,重复步骤2.2~2.4,直到所有簇的样本中心不再发生变化,或达到最大迭代次数为止,得到整个事件持续时间这一分事件上的驾驶风格。
15、更近一步地,在步骤3中还包括以下步骤:
16、步骤3.1,根据采集到的油门踏板和方向盘位置数据,由vi=(xi+1-xi)/t和ai=2(xi+1-xi)/t2两个公式计算其速度和加速度,并生成分别对应启停事件、超车事件和会车事件下的油门踏板速度、油门踏板加速度、方向盘转角速度和方向盘转角加速度4条曲线;
17、步骤3.2,根据生成的速度与加速度曲线与横轴围成的面积纵坐标的高低赋予不同颜色深度,形成更容易识别的速度与加速度图像。
18、步骤3.3,将众多不同的速度与加速度图像输入超轻量图像分类模型进行分类的和识别。
19、更近一步地,在步骤3.3中还包括以下步骤:
20、步骤3.3.1,对于原始图片,通过数据增强策略集成,融合图像变换、图像裁剪和图像混叠3种数据增强方法,通过调整触发概率p%,增强模型的泛化能力,以此得到通过处理后的图片,通过此模型将经过处理和增强的图片作为输出进入半监督蒸馏算法ssld进行权重的预训练;
21、步骤3.3.2,对上述步骤3.3.1中得到的未贴标签的图片数据,通过小模型学习到imagenet22k无标签大规模数据的知识,并将通过半监督蒸馏算法ssld预训练得到的权重作为模型的初始化参数,进入骨干网络模型pp-lcnet;
22、步骤3.3.3,通过步骤3.3.2的算法训练出来的权重对骨干网络模型pp-lcnet进行初始化,再将图片数据输入模型进行优化,经过该网络处理后得到一个全连接层网络,并将结果输入到skl蒸馏损失函数;
23、步骤3.3.4,将步骤3.3.3中的图片数据同时进入教室预训练模型进行训练,再通过skl-ugi知识蒸馏算法,在经典的kl知识蒸馏算法的基础上引入对称信息,将该算法输出的图片输入到skl蒸馏损失函数,得到最终的图像识别结果;
24、通过该识别结果分别得到启停、超车和会车三个操作事件下油门踏板速度、油门踏板加速度、方向盘转角速度和方向盘转角加速度四个分事件、以及常规驾驶下60km/h、60-80km/h和80-120km/h三个限速模式表现的驾驶风格。
25、更近一步地,在步骤4中还包括以下步骤:
26、步骤4.1,根据启停、超车和会车三个事件确定样本条数3和激进型、正常型和谨慎型三个驾驶风格确定样本维度数3,取得每一个分事件下驾驶风格,并根据影响大小给每一个驾驶风格确定一个值,作为算法中随机变量的取值xij,即得到变量矩阵:
27、
28、其中,i分别表示启停、超车和会车三个事件,j表示激进型、正常型和谨慎型三个驾驶风格;
29、步骤4.2,对上述矩阵进行标准化处理,即根据不同指标的含义,使用公式和将其分为正向指标和逆向指标,其中,xj表示同一个事件下三个驾驶风格的变量取值;
30、步骤4.3,通过公式其中对数据中每个维度的熵值进行计算;
31、步骤4.4,通过公式dj=1-ej计算冗余度和公式进行每个冗余度的权重计算,并由上述计算得到加权后的范化矩阵z=(zij)n×m=(pij*ωj);
32、步骤4.5,通过样本中表现最好的值和表现最差的值分别确定正理想解和负理想解再根据公式计算每个样本距离正理想解的距离和每个样本距离负理想解的距离
33、步骤4.6,通过以下公式计划各评价对象与最优方案的贴近程度,其结果的取值范围为[0,1],越接近1表明样本评分越好;该评分值即每个分事件下驾驶风格所占权重,表明其对最终结果的影响程度,并取权重最大值作为该事件下表现的驾驶风格;
34、步骤4.7,通过上述方式,重复步骤4.1~4.6分别对启停事件、超车事件和会车事件下的整个事件持续时间、油门踏板速度、油门踏板加速度、方向盘转角速度和方向盘转角加速度等各5个分事件进行底层的权重融合;再重复步骤4.1~4.6对常规驾驶中60km/h、60-80km/h和80-120km/h三个限速模式进行次顶层权重融合;同理重复步骤4.1~4.6对操作事件和常规驾驶进行顶层权重融合,最终得到驾驶员的驾驶风格,完成驾驶风格的分类。
35、本发明达到的有益效果是:
36、与现有的仅使用汽车速度和加速度或者使用机器学习的方式进行驾驶风格分类的方法相比,本发明创新的将整个驾驶数据分为不同的事件进行讨论,并且针对不同的事件使用了不同驾驶风格识别方法,并且最终通过topsis综合评分的办法进行权重融合完成分类。针对整个事件持续时间使用经典kmeans聚类的方式进行分类,在少量数据的情况下可以达到更高的分类精度;针对油门踏板和方向盘转角的速度与加速度图像,创新的使用了超轻量图像分类(pluc)模型进行分类,有效保证了在数据量很小情况下的图像分类精度;最终通过基于熵权法的topsis综合评分方法对分事件的各个驾驶风格进行多层权重融合,使得驾驶风格的分类更具客观性、提高了分类可信度、简化了分类算法和模型,使得驾驶风格的分类在进行驾驶权分配的研究中提供更好的模型输入参数。
- 还没有人留言评论。精彩留言会获得点赞!