鸟瞰概率图的更新方法、车道线检测方法及相关装置与流程
本技术涉及更新,特别涉及一种鸟瞰概率图的更新方法、车道线检测方法及相关装置。
背景技术:
1、在自动驾驶、高精地图等领域,更新频率高、计算量小、传输快的众包式采集建图越来越受到大家的青睐。采图所使用的车载传感器可以感知车辆周围环境和提供定位功能,而众包三维语义地图的建立与更新,亦是通过处理这些传感器数据得到。当语义地图用做定位时,且有地图尺寸小、传输快等优点。其中,车道线的信息和坐标更是需要被精准的检测出来,其精准程度直接影响到自动驾驶车辆的众多安全辅助驾驶行为。
2、但是,对于目前最先进的车道线检测感知算法,也无法保证对于每条车道线的精准无误,比如一些特殊路段,如:左转或者右转专用道、高速路上下匝道、城区路口、城区s弯以及高速高架汇流等等。除此之外,由于遮挡等因素,感知检测还会出现某一帧或者某几帧检测丢失的现象,或者检测十分模糊,从而造成了自动驾驶时的安全问题。
技术实现思路
1、本技术主要解决的技术问题是提供鸟瞰概率图的更新方法、车道线检测方法及相关装置,能够达到实时输出高质量鸟瞰概率图,便于下游安全使用辅助驾驶的目的。
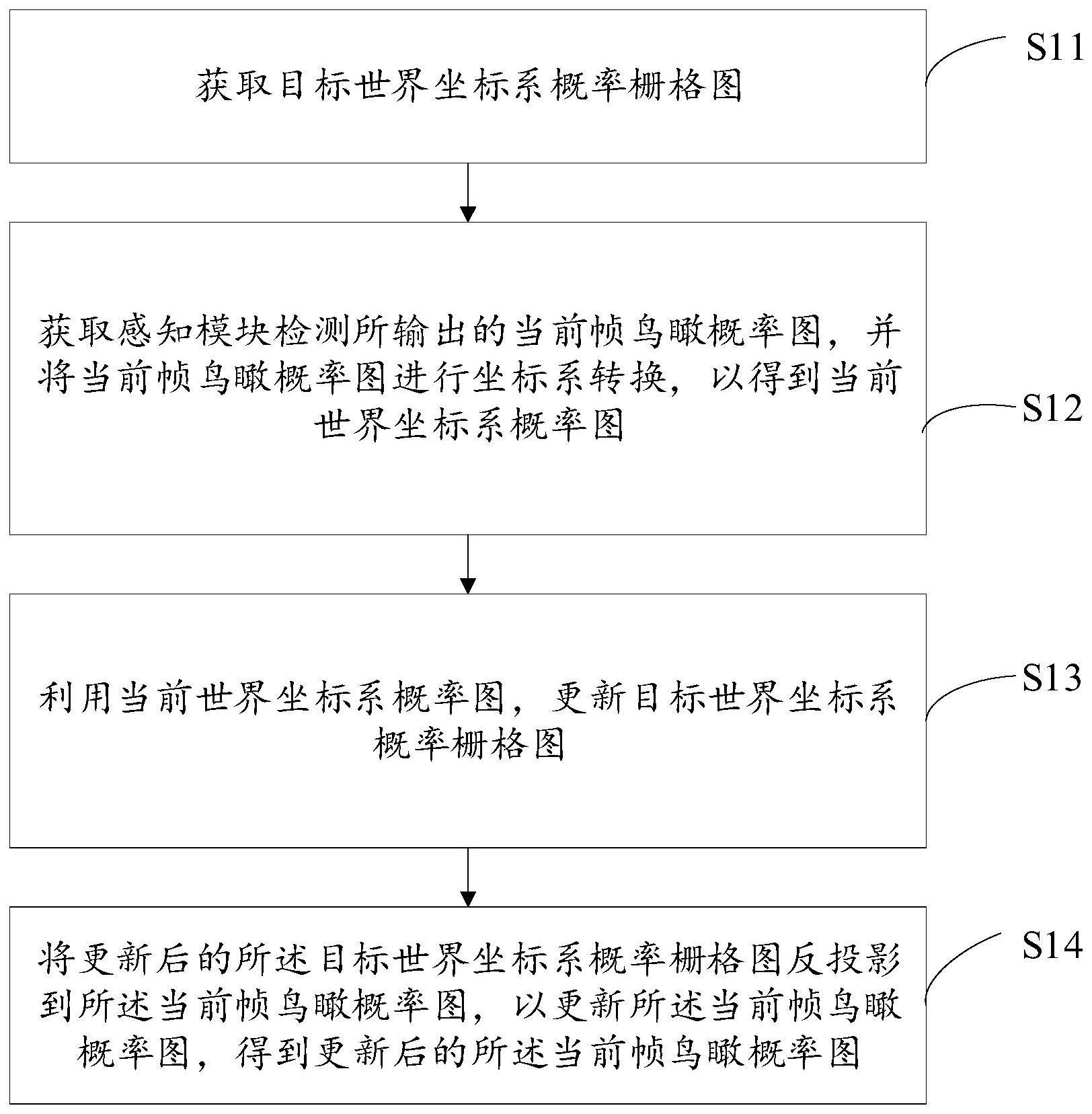
2、为解决上述技术问题,本技术的第一方面公开了一种鸟瞰概率图的更新方法,该方法包括:获取目标世界坐标系概率栅格图;获取感知模块检测所输出的当前帧鸟瞰概率图,并将所述当前帧鸟瞰概率图进行坐标系转换,以得到当前世界坐标系概率图;利用所述当前世界坐标系概率图,更新所述目标世界坐标系概率栅格图;将更新后的所述目标世界坐标系概率栅格图反投影到所述当前帧鸟瞰概率图,以更新所述当前帧鸟瞰概率图,得到更新后的所述当前帧鸟瞰概率图。
3、其中,所述利用所述当前世界坐标系概率图,更新所述目标世界坐标系概率栅格图,包括:依据所述当前世界坐标系概率图,更新所述目标世界坐标系概率栅格图,得到当前世界坐标系概率栅格图,作为更新后的所述目标世界坐标系概率栅格图,从而更新所述目标世界坐标系概率栅格图;其中,所述当前世界坐标系概率栅格图中,每个栅格对应的值为该栅格在所述目标世界坐标系概率栅格图中对应的值与所述当前鸟瞰概率图中转换到所述当前世界坐标系概率图中的像素对应的值之和。
4、其中,所述利用所述当前世界坐标系概率图,更新所述目标世界坐标系概率栅格图,进一步包括:获取与所述当前帧鸟瞰概率图相应的众包鸟瞰概率图,并将所述众包鸟瞰概率图进行坐标系转换,以得到众包世界坐标系概率图;将所述众包世界坐标系概率图投影到所述当前世界坐标系概率栅格图,得到众包世界坐标系概率栅格图,作为更新后的所述目标世界坐标系概率栅格图,从而更新所述目标世界坐标系概率栅格图;其中,所述众包世界坐标系概率栅格图中,每个栅格对应的值为该栅格在所述当前世界坐标系概率栅格图中对应的值与所述众包鸟瞰概率图中转换到所述众包世界坐标系概率图中的像素对应的值之和。
5、其中,所述目标世界坐标系概率栅格图为建立并初始化的原始世界坐标系概率栅格图;或者所述目标世界坐标系概率栅格图对应上一世界坐标系概率图,其中所述上一世界坐标系概率图是感知模块检测所输出的上一帧鸟瞰概率图进行坐标系转换而得到的。
6、其中,所述将所述当前帧鸟瞰概率图进行坐标系转换,以得到当前世界坐标系概率图,包括:将所述当前帧鸟瞰概率图的像素坐标进行区间映射,以得到所述当前帧鸟瞰概率图在车辆坐标系下的像素坐标;将所述当前帧鸟瞰概率图在车辆坐标系下的像素坐标转换成世界坐标系下的像素坐标,从而得到所述当前世界坐标系概率图;将所述上一帧鸟瞰概率图进行坐标系转换,以得到上一帧世界坐标系概率图,包括:将所述上一帧鸟瞰概率图的像素坐标进行区间映射,以得到所述上一帧鸟瞰概率图在车辆坐标系下的像素坐标;将所述上一帧鸟瞰概率图在车辆坐标系下的像素坐标转换成世界坐标系下的像素坐标,从而得到所述上一世界坐标系概率图;所述将所述众包鸟瞰概率图进行坐标系转换,以得到众包世界坐标系概率图,包括:将所述众包鸟瞰概率图的像素坐标进行区间映射,以得到所述众包鸟瞰概率图在车辆坐标系下的像素坐标;将所述众包鸟瞰概率图在车辆坐标系下的像素坐标转换成世界坐标系下的像素坐标,从而得到所述众包世界坐标系概率图。
7、其中,将所述当前帧鸟瞰概率图或者所述上一帧鸟瞰概率图或者众包鸟瞰概率图的像素坐标进行区间映射,以得到所述当前帧鸟瞰概率图或者所述上一帧鸟瞰概率图或者众包鸟瞰概率图的在车辆坐标系下的像素坐标,包括:将所述当前帧鸟瞰概率图或者所述上一帧鸟瞰概率图或者众包鸟瞰概率图中的每个像素分割成预设数量个子像素;将所述预设数量个子像素中每个子像素的像素坐标进行区间映射,从而得到所述当前帧鸟瞰概率图或者所述上一帧鸟瞰概率图或者众包鸟瞰概率图在所述车辆坐标系下的像素坐标。
8、其中,建立并初始化所述原始世界坐标系概率栅格图,包括:定义所述目标世界坐标系概率栅格图在世界坐标系下的栅格数以及每个栅格的尺寸,其中,每个栅格对应相应的概率,且被初始化而具有初始值,每个栅格的初始值与所述相应的概率相关。
9、其中,所述将更新后的所述目标世界坐标系概率栅格图反投影到所述至少一帧鸟瞰概率图中的当前帧鸟瞰概率图,以更新所述当前帧鸟瞰概率图,得到更新后的所述当前帧鸟瞰概率图,包括:根据所述当前帧鸟瞰概率图中每个像素在世界坐标系下的像素坐标,得到该像素在所述更新后的所述目标世界坐标系概率栅格图中对应的栅格的值;将该像素在所述更新后的所述目标世界坐标系概率栅格图中对应的栅格的值转换成概率值,并将所述概率值转换成像素灰度值,从而实现更新所述当前帧鸟瞰概率图,得到更新后的所述当前鸟瞰概率图。
10、本技术第二方面公开了一种车道线检测方法,该方法包括:获取车道线检测所输出的当前帧鸟瞰概率图;对所述当前帧鸟瞰概率图进行处理流程,以得到更新后的所述当前帧鸟瞰概率图,其中所述处理流程包括如如第一方面中所述的鸟瞰概率图的更新方法;根据所述更新后的所述当前帧鸟瞰概率图,得到相应的车道线。
11、本技术第三方面公开了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有程序数据,所述处理器用于执行所述程序数据以实现如第一方面中所述的鸟瞰概率图的更新方法,或者以实现第二方面中所述的车道线检测方法。
12、本技术第四方面公开了一种非易失性计算机可读存储介质,所述非易失性计算机可读存储介质存储有程序指令,所述计算机程序在被处理器执行时,用于实现如第一方面中所述的鸟瞰概率图的更新方法,或者以实现第二方面中所述的车道线检测方法。
13、本技术第五方面公开了一种车辆,所述车辆包括如上述第三方面的电子设备或如第四方面的非易失性计算机可读存储介质。
14、本技术实施例的有益效果是:区别于现有技术,本技术提供的鸟瞰概率图的更新方法,该方法包括:获取目标世界坐标系概率栅格图;获取感知模块检测所输出的当前帧鸟瞰概率图,并将当前帧鸟瞰概率图进行坐标系转换,以得到当前世界坐标系概率图;利用当前世界坐标系概率图,更新目标世界坐标系概率栅格图;将更新后的目标世界坐标系概率栅格图反投影到当前帧鸟瞰概率图,以更新当前帧鸟瞰概率图,得到更新后的当前帧鸟瞰概率图。通过上述方式,能够达到实时输出高质量鸟瞰概率图,便于下游安全使用辅助驾驶的目的。
- 还没有人留言评论。精彩留言会获得点赞!