HUD设备、控制方法、控制装置及电子设备与流程
本技术涉及抬头显示(head-up display)hud,尤其涉及一种hud设备、控制方法、控制装置及电子设备。
背景技术:
1、hud设备可用于根据车机发送的数据生成车辆的速度、导航轨迹等相关信息,并投射到车辆前方显示,使车辆驾驶员在保持抬头驾驶的情况下,也可以及时了解车辆的信息。
2、现有技术中,hud设备接收到车机发送的hud数据是离散的,当接收到车机在一个时刻发送的数据后,hud设备可以根据hud数据生成导航曲线等内容,并投射到车辆前方显示。hud设备在下一个时刻接收到车机发送的新的hud数据之后,根据新的hud数据更新导航曲线等内容,并重新投射到车辆前方显示。
3、但是,采用现有技术,hud设备在接收到车机发送的新的hud数据之后,直接根据新的hud数据进行显示,使hud设备接收到hud数据前后显示的内容之间的转换较为生硬,给用户带来观看的顿挫感、闪烁感等,严重影响了hud设备的显示效果。
技术实现思路
1、本技术提供一种hud设备、控制方法、控制装置及电子设备,hud设备可以对显示的曲线进行滤波处理,使hud设备显示的曲线之间的转换更加平滑,以克服现有技术中hud设备显示效果较差的技术问题。
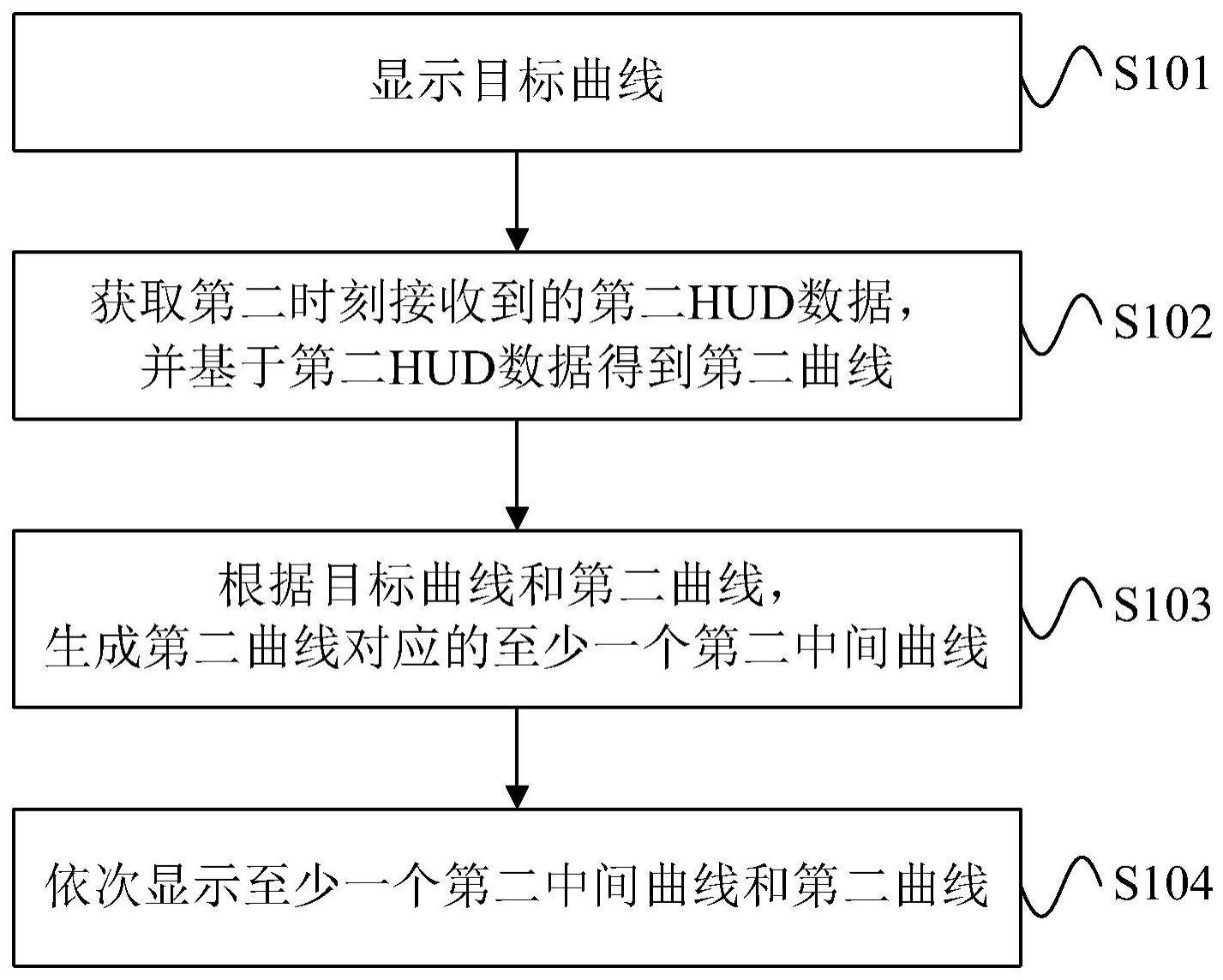
2、本技术第一方面提供一种抬头显示hud设备的控制方法,包括:显示目标曲线;所述目标曲线为基于第一时刻接收到的第一hud数据得到的第一曲线,或所述第一曲线对应的第一中间曲线;获取第二时刻接收到的第二hud数据,并基于所述第二hud数据得到第二曲线;根据所述目标曲线和所述第二曲线,生成所述第二曲线对应的至少一个第二中间曲线;所述至少一个第二中间曲线的曲率从所述目标曲线的曲率渐变至所述第二曲线的曲率;依次显示所述至少一个第二中间曲线和所述第二曲线。
3、在本技术第一方面一实施例中,所述根据所述目标曲线和所述第二曲线,生成所述第二曲线对应的至少一个第二中间曲线,包括:根据平滑曲线,对所述目标曲线的方程和所述第二曲线的方程中,对应于相同自变量的每两个系数分别进行滤波处理,得到每两个系数对应的至少一个中间系数;所述至少一个中间系数从所述目标曲线的方程中的系数渐变至所述第二曲线的方程中的系数;根据所述每两个系数对应的至少一个中间系数,生成所述至少一个第二中间曲线的方程;根据所述至少一个第二中间曲线的方程,确定所述至少一个第二中间曲线。
4、在本技术第一方面一实施例中,所述平滑曲线包括第一积分区间和第二积分区间,所述第一积分区间的起始值到终止值之间所述平滑曲线的取值逐渐增加,所述第二积分区间的起始值到终止值之间所述平滑曲线的取值逐渐降低。
5、在本技术第一方面一实施例中,当所述目标曲线为所述第一曲线,所述对所述目标曲线的方程和所述第二曲线的方程中,每两个对应相同自变量的系数进行滤波处理,得到每两个系数对应的至少一个中间系数,包括:针对对应于相同自变量的所述目标曲线的方程中的第一系数和所述第二曲线的方程中的第二系数,根据所述平滑曲线从预设起始值到预设终止值之间的积分结果与所述第一系数和所述第二系数的差值,确定所述第二曲线对应的第一缩放系数;按照预设增量值对所述预设起始值到所述预设终止值之间的所述平滑曲线进行分段处理,得到多个数值区间;从所述预设起始值开始,依次根据所述平滑曲线的每个数值区间进行积分处理得到积分结果;根据每个数值区间的积分结果、所述第一缩放系数和所述第一系数,确定每个数值区间的至少一个中间系数;每个中间系数是通过前一个数值区间的中间系数、以及所述第一缩放系数和前一个数值区间的积分结果的乘积相加得到。
6、在本技术第一方面一实施例中,所述根据所述每两个系数对应的至少一个中间系数,生成所述至少一个第二中间曲线的方程,包括:从每两个系数对应的至少一个中间系数中,确定至少一个中间系数组;每个中间系数组包括所述目标曲线的方程和所述第二曲线的方程中每两个对应相同自变量的系数滤波处理得到的对应于相同增量值的多个中间系数;根据所述至少一个中间系数组和预设的自变量,生成所述至少一个第二中间曲线的方程;所述预设的自变量、所述目标曲线的方程中的自变量和所述第二曲线的方程中的自变量相同。
7、在本技术第一方面一实施例中,当所述目标曲线为所述第一中间曲线,所述对所述目标曲线的方程和所述第二曲线的方程中,每两个对应相同自变量的系数进行滤波处理,得到每两个系数对应的至少一个中间系数,包括:针对对应于相同自变量的所述目标曲线的方程中的第一系数和所述第二曲线的方程中的第二系数,根据所述目标曲线对应的第二缩放系数、所述目标曲线在平滑曲线上对应的数值区间内积分结果的乘积,以及所述第二曲线对应的第一缩放系数、所述第二积分区间上所述目标曲线在平滑区间上所对应数值区间的积分结果的乘积,建立第一等式;根据所述第二曲线中的第二系数与所述目标曲线中第一系数之差,以及所述第一缩放系数、所述第一积分区间上所述目标曲线在平滑曲线上对应的数值区间的目标积分值到预设终止值的积分结果的乘积,建立第二等式;联立所述第一等式和所述第二等式得到所述目标积分值和所述第一缩放系数;按照预设增量值对所述预设起始值到所述预设终止值之间的所述平滑曲线进行分段处理,得到多个数值区间;从所述目标积分值开始,依次根据所述平滑曲线的每个数值区间进行积分处理得到积分结果;根据每个数值区间的积分结果、所述第一缩放系数和所述第一系数,确定每个数值区间的至少一个中间系数;每个中间系数是通过前一个数值区间的中间系数、以及所述第一缩放系数和前一个数值区间的积分结果的乘积相加得到。
8、在本技术第一方面一实施例中,系数,包括:当联立所述第一等式和所述第二等式无解时,根据所述目标曲线对应的第二缩放系数、所述目标曲线在平滑曲线上对应的数值区间内积分结果的乘积,以及所述第二曲线对应的第一缩放系数、所述第一积分区间上所述目标曲线在平滑区间上对应的数值区间的积分结果的乘积,建立第三等式;据所述第二曲线中的第二系数与所述目标曲线中第一系数之差,以及所述第一缩放系数、所述第一积分区间和所述第二积分区间上所述目标曲线在平滑曲线上对应的数值区间的预设终止值的积分结果的乘积,建立第四等式;联立所述第三等式和所述第四等式得到所述目标积分值和所述第一缩放系数。
9、在本技术第一方面一实施例中,所述联立所述第一等式和所述第二等式得到所述目标积分值和所述第一缩放系数,包括:当联立所述第一等式和所述第二等式无解,且所述第二缩放系数、所述目标曲线在平滑曲线上对应的数值区间内积分结果的乘积小于第一计算结果,则根据所述平滑曲线从预设起始值到预设终止值之间的积分结果与所述第一系数和所述第二系数的差值,确定所述第一缩放系数;其中,第一计算结果为所述第二系数与所述第一系数之差与第一乘积之比,第一乘积为所述平滑曲线从预设起始值到预设终止值之间的积分结果与所述第二积分区间上的第一个数值区间对应的积分结果的乘积。
10、在本技术第一方面一实施例中,所述依次显示所述至少一个第二中间曲线和所述第二曲线之前,还包括:当所述第二系数和所述第一系数的差值与所述第二缩放系数的正负不同,根据所述第二缩放系数、预设数量、所述目标曲线在平滑曲线上所对应的数值区间在所述第二积分区间上的积分结果,得到预设数量个调整系数;根据所述预设数量个调整系数,生成预设数量个调整曲线,并依次显示所述预设数量个调整曲线。
11、本技术第二方面提供一种抬头显示hud设备的控制装置,包括:显示模块,用于显示目标曲线;所述目标曲线为基于第一时刻接收到的第一hud数据得到的第一曲线,或所述第一曲线对应的至少一个第一中间曲线;获取模块,用于获取第二时刻接收到的第二hud数据,并基于所述第二hud数据得到第二曲线;滤波模块,根据所述目标曲线和所述第二曲线,生成所述第二曲线对应的至少一个第二中间曲线;所述至少一个第二中间曲线的曲率从所述目标曲线的曲率渐变至所述第二曲线的曲率;所述显示模块还用于,依次显示所述至少一个第二中间曲线和所述第二曲线。
12、本技术第三方面提供一种抬头显示hud设备,用于执行如本技术第一方面任一项所述的方法。
13、本技术第四方面提供一种车辆,包括如本技术第三方面提供的所述的hud设备。
14、本技术第五方面提供一种电子设备,包括:至少一个处理器和存储器;所述存储器存储计算机指令;所述至少一个处理器执行所述存储器存储的计算机指令时,所述至少一个处理器执行如本技术第一方面任一项所述的方法。
15、本技术第六方面提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机指令,当处理器执行所述计算机指令时,实现如本技术第一方面任一项所述的方法。
16、本技术第七方面提供一种计算机程序产品,包括计算机程序,所述计算机程序被执行时,实现如本技术第一方面任一项所述的方法。
17、综上,本技术提供的hud设备、控制方法、控制装置及电子设备中,hud设备可以接收到第二hud数据后,基于第二hud数据得到的第二曲线和目标曲线进行滤波处理生成第二曲线对应的至少一个中间曲线,并依次显示中间曲线,由于至少一个中间曲线的曲率从目标曲线的曲率渐变至第二曲线的曲率,因此hud设备显示的曲线之间的转换更加平滑,从而改善了hud设备的显示效果,进而保证车辆驾驶员的正常驾驶,保障了车辆和人员的安全。
- 还没有人留言评论。精彩留言会获得点赞!