一种基于可变窗口匹配技术的数字图像相关方法
本发明涉及图像处理领域,尤其涉及一种基于可变窗口匹配技术的数字图像相关方法。
背景技术:
1、数字图像相关方法,即dic技术是一种非接触,非干涉式的全场光学测量方法,被广泛应用与全场位移和应变测量中。在物体表面自然散斑或者人工喷涂散斑,当物体发生变形或位移时候,散斑也发生变化。通过机拍摄变形前后散斑图像,并比较相关性,计算出出物体全场位移以及应变。
2、数字图像相关方法通常长分为整像素搜索和亚像素搜索两部分,整像素搜索的常用有逐点搜索,人工标定,爬山搜索,人工鱼群搜索等算法。其中逐点搜索时一种全局搜索算法,准确度高,但耗时大;爬山搜索,人工鱼群等智能搜索容易陷入局部最优的误差;人工标定的方法操作不便。
3、数字图像相关方法的测量精度主要取决于亚像素测量精度,现在较为常用的亚像素测量方法是高斯牛顿反向组合算法(icgn)。它是一种迭代算法,需要提供较为准确的初始变形猜测,通常是将整像素的搜索结果作为初始猜测进行亚像素搜素。
技术实现思路
1、为了解决上述现有技术中数字图像相关方法的缺陷,本发明提出了一种基于可变窗口匹配技术的数字图像相关方法,是一种可作用于整像素搜索的快速搜索方法,其采用可变搜索窗口,实现快速准确的整像素测量,大大提高了像素点匹配效率,缩短了计算时间。
2、本发明提出了一种基于可变窗口匹配技术的数字图像相关方法,首先获取参考图像上至少一个任意计算点在目标图像上的最佳匹配像素点;然后基于最佳匹配像素点计算目标图像与参考图像之间的变形参数取值;参考图像为试件变形前的拍摄图像,目标图像为试件变形后的拍摄图像;最佳匹配像素点的获取包括以下步骤:
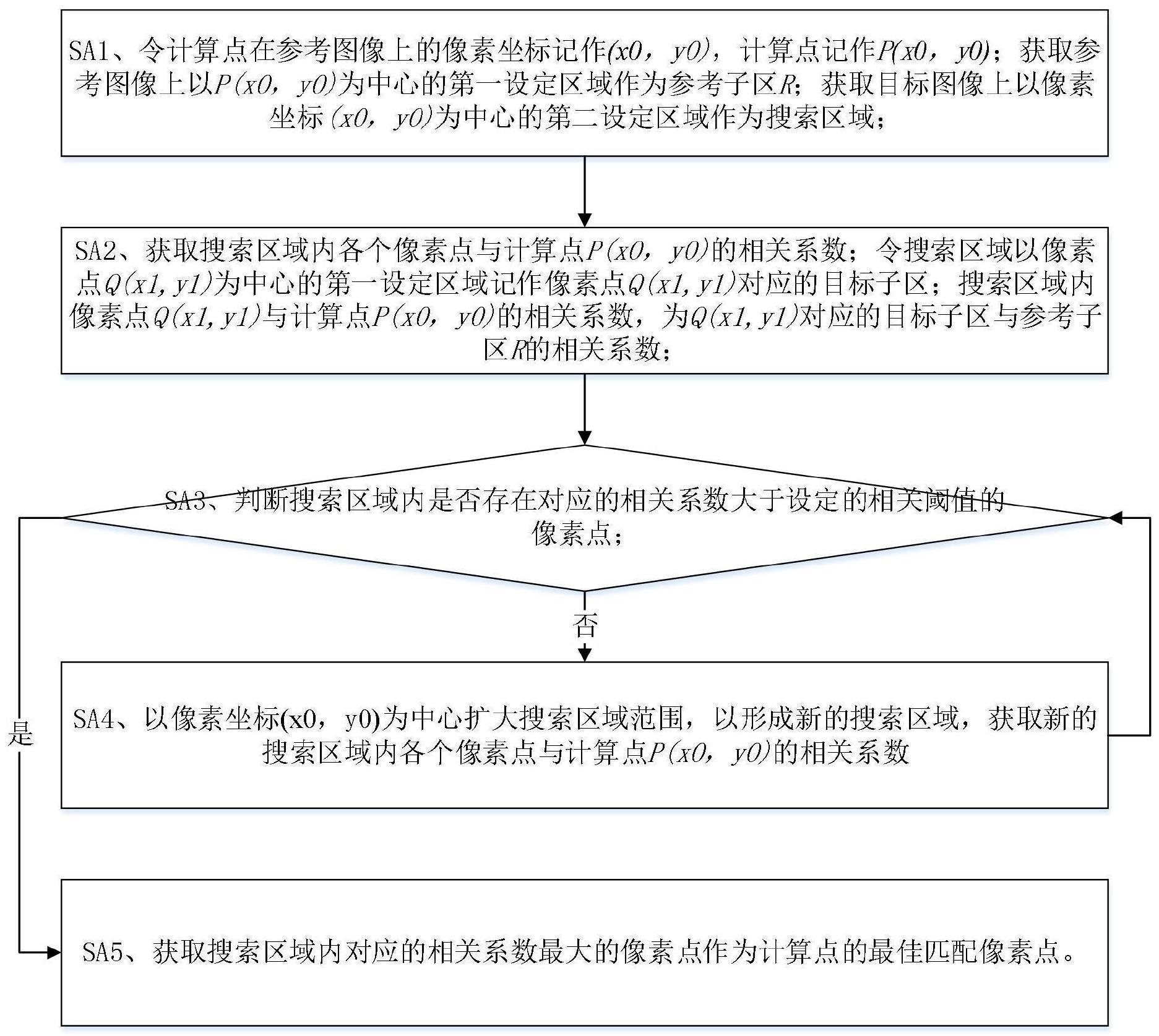
3、sa1、令计算点在参考图像上的像素坐标记作(x0,y0),计算点记作p(x0,y0);获取参考图像上以p(x0,y0)为中心的第一设定区域作为参考子区r;获取目标图像上以像素坐标(x0,y0)为中心的第二设定区域作为搜索区域;
4、sa2、获取搜索区域内各个像素点与计算点p(x0,y0)的相关系数;令搜索区域以像素点q(x1,y1)为中心的第一设定区域记作像素点q(x1,y1)对应的目标子区;搜索区域内像素点q(x1,y1)与计算点p(x0,y0)的相关系数,为q(x1,y1)对应的目标子区与参考子区r的相关系数;
5、sa3、判断搜索区域内是否存在对应的相关系数大于设定的相关阈值的像素点;
6、sa4、否,则以像素坐标(x0,y0)为中心扩大搜索区域范围,以形成新的搜索区域,获取新的搜索区域内各个像素点与计算点p(x0,y0)的相关系数,然后返回步骤sa3;
7、sa5、是,则获取搜索区域内对应的相关系数最大的像素点作为计算点的最佳匹配像素点。
8、优选的,步骤sa2中目标子区与参考子区的相关系数的计算公式如下:
9、
10、其中,r(x,y)为参考子区r中像素坐标为(x,y)的像素点的灰度值,t(x',y')为目标子区t中像素坐标为(x’,y’)的像素点的灰度值,为参考子区r的平均灰度,为目标子区t的平均灰度;表示目标子区t中像素坐标为(x’,y’)的像素点在目标子区t上位置等同于参考子区r中像素坐标为(x,y)像素点在参考子区r上的位置;即目标子区t上像素点(x’,y’)与目标子区t中心点构成的矢量坐标等于参考子区r上像素点(x,y)与参考子区r中心点构成的矢量坐标。
11、优选的,步骤sa2还包括构建节点与搜索区域内像素点一一对应的mx矩阵,sa2中将搜索区域内各像素点对应的相关系数填充到mx矩阵中对应的节点上;步骤sa3具体为判断mx矩阵中是否存在赋值大于设定的相关阈值的节点;否,则执行步骤sa4,sa4中还包括根据搜索区域扩充结果扩充mx矩阵;是,则执行步骤sa5。
12、优选的,步骤sa4具体为:以像素坐标(x0,y0)为中心扩大搜索区域范围,以形成新的搜索区域;根据新的搜索区域扩充mx矩阵,使得新的搜索区域中的像素点与扩充后的mx矩阵的节点一一对应;遍历mx矩阵中的节点,当节点赋值为初始值,则计算搜索区域中对应该节点的像素点与计算点p(x0,y0)的相关系数并填充到mx矩阵中该节点上。
13、优选的,sa2中,mx矩阵中各节点的初始值为-1;sa4中,mx矩阵中各新增节点的初始值为-1。
14、优选的,包括以下步骤:
15、s1、拍摄试件的变形前图像和变形后图像,将变形前图像作为参考图像,将变形后图像作为目标图像;
16、s2、在参考图像上设置感兴趣区域,在感兴趣区域内筛选计算点,获取参考图像上以计算点为中心的参考子区的变形参数组其中ux表示参考子区的水平位移,vy表示参考子区的竖直位移,表示参考子区的水平拉伸,表示参考子区的水平剪切,表示参考子区的竖直剪切,表示参考子区的竖直拉伸;
17、对各参考子区的变形参数组进行迭代,获取迭代收敛时的参数组取值作为参考子区的变形参数取值;
18、部分计算点对应的变形参数组的初始赋值为{u0,v0,0,0,0,0},u0为计算点和对应的最佳匹配像素点之间的水平位移,v0为计算点和对应的最佳匹配像素点之间的竖直位移;
19、另一部分计算点对应的变形参数组的初始赋值为已计算的相邻计算点对应的变形参数取值。
20、优选的,步骤s2具体包括以下步骤:
21、s21、在参考图像上设置感兴趣区域,在感兴趣区域内筛选计算点;设置变形参数组令首个计算点作为检测点;
22、s23、获取所述检测点在目标图像上的最佳匹配像素点;结合所述检测点和对应的最佳匹配像素点计算水平位移u0和竖直位移v0;
23、s24、令检测点的变形参数组的初始赋值为{u0,v0,0,0,0,0};然后采用icgn算法对变形参数组进行迭代,获取迭代收敛时的参数组取值作为以检测点为中心点的参考子区的变形参数取值;
24、s25、如果感兴趣区域内还存在未计算变形参数取值的计算点,则将与检测点相邻的计算点作为新的检测点,令检测点的变形参数组的初始赋值为上一个检测点的变形参数取值;
25、s26、采用icgn算法对检测点的变形参数组进行迭代;
26、如果变形参数组在设定的迭代次数内收敛,则获取迭代收敛时的参数组取值作为以检测点为中心点的参考子区的变形参数取值,然后返回步骤s25;
27、如果变形参数组在设定的迭代次数内未收敛,则令参考图像上的像素点(x2+u,y2+v)作为检测点,再返回步骤s23;(x2,y2)表示上一个检测点的像素坐标,u为(x2,y2)对应的变形参数取值中的水平位移取整后的值,v为(x2,y2)对应的变形参数取值中的竖直位移取整后的值;水平位移取整和竖直位移取整采用四舍五入、向下取整或者向上取整。
28、优选的,变形参数组的迭代收敛条件为最近两组变形参数组的迭代精度达到设定的精度阈值δ,最近两组变形参数组的迭代精度δp的计算公式为:
29、
30、其中,δux表示最近两组变形参数组中的水平位移ux之差,δvy表示最近两组变形参数组中的竖直位移vy之差,表示最近两组变形参数组中的水平拉伸之差,表示最近两组变形参数组中的水平剪切之差,表示最近两组变形参数组中的竖直剪切之差,表示最近两组变形参数组中的竖直拉伸之差。
31、本发明的优点在于:
32、(1)本发明提供的基于可变窗口匹配技术的数字图像相关方法,采用可变搜索区域,相对于现有的整像素搜索需要全场搜索,本发明只需要进行部分像素点搜索,大大降低了搜索耗时,提高了像素点匹配效率,大大节约了像素匹配搜索时间,从而进一步提高了变形参数组的计算效率。
33、(2)本发明基于区域相关性计算像素点匹配程度,有利于避免光线、角度等的场外因素影响,从而提高像素点匹配精确度。
34、(3)本发明采用mx矩阵记录像素点计算结果,有利于保存数据,提高计算效率和精确度;尤其是通过mx矩阵和可变搜索区域结合,避免了重复计算,进一步提高了计算效率。
35、(4)本发明中,理想情况下只需要对首个计算点搜索最佳匹配像素点,剩余的计算点对应的变形参数组可基于前一个计算点赋初始值;如此,通过变形参数组初始赋值,使迭代初值更接近实际值,在保证精度的情况下让迭代更快收敛。本发明不需要进行全场整像素搜索,只针对第一个点和亚像素搜索不成功的点进行整像素搜索,提高了计算速度,并有矫正搜索误差的能力。
36、(5)本发明中还通过icgn算法收敛限制条件排除了过渡变形的区域,从而识别不适用于通过前一个计算点赋予变形参数组初始值的计算点,从而在前一个计算点参考子区外选择新的检测点计算最佳匹配像素点,再基于最佳匹配像素点计算变形参数取值,保证了每一个计算点对应的变形参数取值的计算精度。
37、(6)本发明对于全场位移计算速度提升很大,尤其当计算点数量越多,计算效率提升更明显。本发明提供了一种通用的快速,精确,鲁棒性好的数字图像相关算法,可以用在二维或三维物体表面应变测量中,可快速精确算出物体表面全场位移,并具有矫正搜索误差的功能,进而计算出物体表面全场应变,具有很高的实际应用价值。
- 还没有人留言评论。精彩留言会获得点赞!