一种基于机器视觉的烧结机尾状态监测方法与流程
本发明涉及冶金智能制造、机器视觉和图像处理领域,更具体的说,涉及一种基于机器视觉的烧结机尾状态监测方法。
背景技术:
1、烧结工序段的现场环境一般比较复杂,通常为高温、高粉尘环境,同时烧结点火温度上千度,其终点温度也在400度左右,因此如何对烧结过程进行科学有效的控制也是烧结从业人员主要的研究热点,而目前国内大部分烧结从业人员对烧结过程本身的控制主要依靠人的经验和技巧,也就是凭着看火工在烧结机尾对烧结饼断面的直观观察和经验来对烧结过程进行相应的判断,并作出下一步操作,但烧结机尾的环境一般比较恶劣,而看火工之间的经验又存在差异,因此由恶劣的环境以及人工经验的差异可能会对烧结矿的质量以及高炉冶炼的效果产生很大影响,所以需要开发一种基于机器视觉的烧结机尾状态监测方法,通过图像处理,结合机器学习等相关算法,对烧结机尾的图像进行实时采集,实时分析,对图像中的红火层厚度、feo含量、黑矿层面积等进行实时检测,并将检测结果及预警情况实时的反馈到现场或中控室的操作人员,从而实现对烧结机尾的实时监测,进一步实现了烧结工序段的智能化生产,提高了钢铁企业的生产效率,降低了人工成本以及由人为因素带来的生产或安全问题。
技术实现思路
1、针对现有技术存在的缺陷和不足,本发明提供一种基于霍夫变换的型钢姿态判别方法。
2、为达到上述目的,本发明提供的技术方案为:
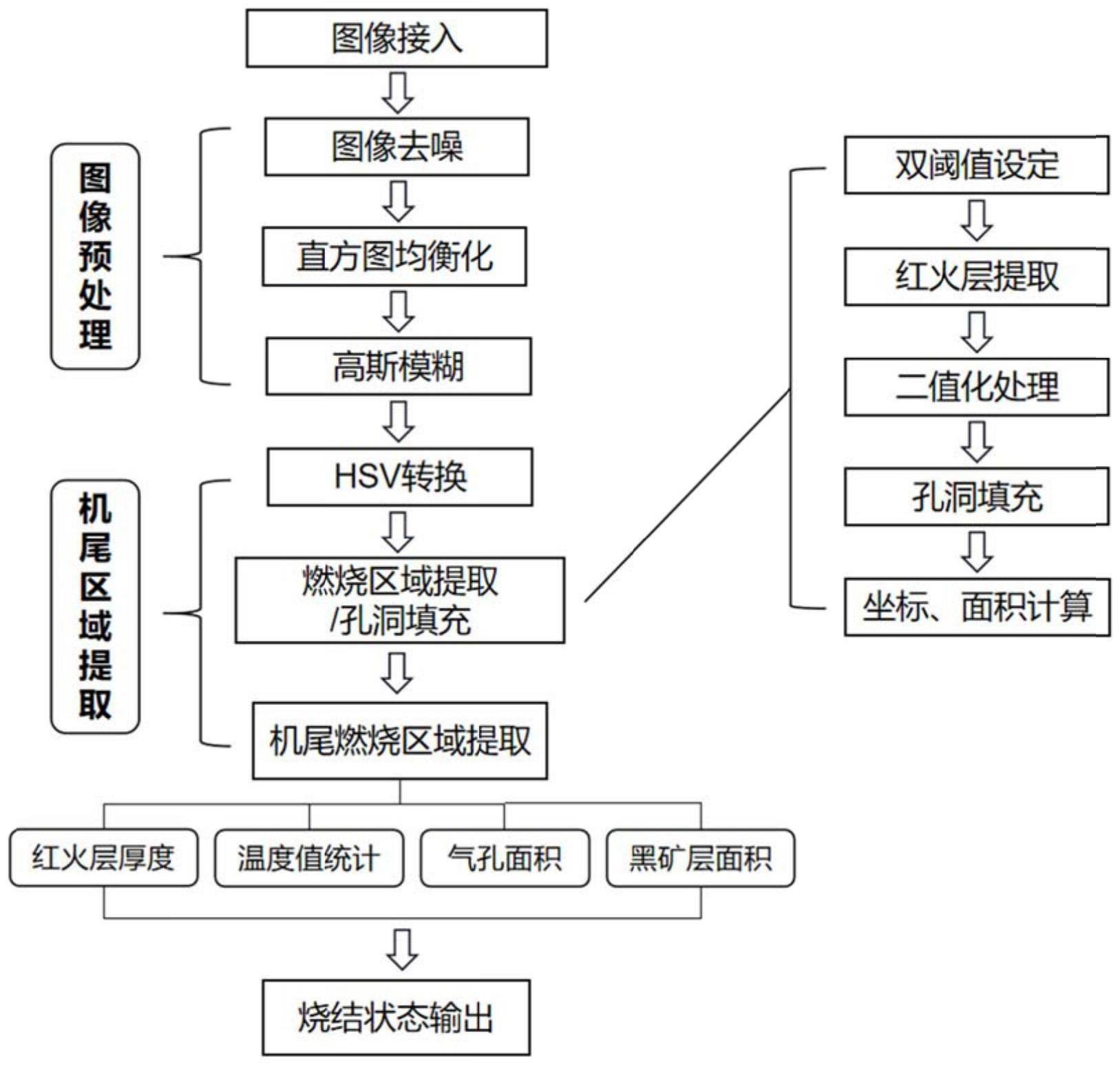
3、本发明的一种基于机器视觉的烧结机尾状态监测方法,包括以下步骤:
4、s1:对输入的烧结机尾图像进行预处理;
5、s2:将原始图像进行色域转换,提取出图像中的燃烧区域;
6、s3:对提取燃烧区域后的图像处理并提取出机尾区域;
7、s4:对提取出的机尾区域进行特征值计算;
8、s5:根据特征值对烧结状态进行判断及监测。
9、进一步的,所述的步骤s1具体为:
10、s11:对输入的烧结机尾图像进行预处理,首先通过图像去噪,对包含噪声点的图像进行中值滤波操作,抑制噪声,同时保持图像的原始细节。
11、s12:对经过中值滤波处理后的图像进行直方图均衡化,对图像中对比度不明显,关键区域较模糊的图像进行直方图均衡化,增强目标与背景的对比度。
12、s13:在步骤s11和步骤s12完成对图像的中值滤波和直方图均衡化后,对图像进行高斯模糊,以便于后续色域转换中的颜色提取。
13、进一步的,所述的步骤s3具体为:
14、s31:对提取燃烧区域后的图像进行二值化处理得到二值化图像。
15、s32:对图像中的燃烧区域进行孔洞填充,得到填充后的烧结机尾断面图像。
16、s33:将填充后的几块燃烧区域进行轮廓提取,计算对应的中心坐标与面积。
17、s34:对几块区域按照面积进行排序,将面积最大的几个区域中坐标位置靠上的中心坐标作为烧结机尾区域的中心坐标,并按照该坐标在原始图像中将机尾区域进行提取,供后续特征值的计算。
18、进一步的,所述的中值滤波操作,选用合适的二维滑动模板,从左到右,从上至下,遍历图像每个像素点,选取每个像素点及其周围临近像素点的像素值,将这些像素值进行排序,将位于中间位置的像素值作为当前像素点的像素值,从而消除孤立的噪声点。
19、进一步的,所述的直方图均衡化,首先扫描原始图像中的每一个像素,计算出图像在不同通道像素值的直方图;其次,计算出各通道直方图的累积分布函数;然后根据累积分布函数和直方图均衡化原理得到输入与输出之间的映射关系;最后根据映射关系得到结果进行图像变换,以此增强图像中目标物体与背景间的对比度。其中映射方法是:
20、
21、其中sk为当前通道像素值经过累积分布函数映射后的值,n为图像中像素的总和,nj为当前通道像素级的个数,l是图像中的单个通道的像素级总数。
22、进一步的,所述的高斯模糊,也叫高斯平滑,实质上是将中心像素的值替换为周围像素的加权平均值,其权重大小由正态分布来进行分配,越靠近中心,权重越大,越原理中心,权重越小,图像的二维正态分布的密度函数为:
23、
24、假定图像的中心像素坐标为(0,0),当σ的值为1.5时,该正态分布为其周围8个像素的权重分配值如下,为了使其权重和为1,需要对该权重矩阵进行归一化,得到高斯模糊模板如下:
25、
26、将权重矩阵归一化得到高斯模糊模板后,将其作用到烧结机尾图像,遍历每一个像素点,将每个像素与其邻域8个像素点对应乘以其权重值再求和,得到的值替换原来像素点的值,对所有像素点进行上述操作后,完成对图像的高斯模糊。
27、进一步的,所述的色域转换及燃烧区域提取,是将原始的rgb(红、绿、蓝)图像转换成hsv(色度、饱和度、明亮度)图像,再借由hsv明亮度通道的值来区分图像中的燃烧区域与非燃烧区域。其中rgb转hsv的变换公式如下:
28、
29、进一步的,所述的孔洞填充,是将区域内一些小的、缺失的孔洞,通过相应的算法进行填充,使其成为完整的区域,本质上孔洞是由前景像素相连接的边界所包围的一个背景区域,一般可通过约束膨胀法对其进行填充。即构建相应的结构元,先找到孔洞中的一个点,用该结构元进行膨胀,然后用原始图像的补集进行约束(交集运算),不断迭代重复这一操作直到算法收敛,就得到孔洞填充图。
30、进一步的,所述的区域中心坐标及面积计算,一般使用图像的零阶矩和一阶矩来计算区域的面积及其中心坐标,其中图像的零阶矩的计算公式如下:
31、
32、其中v(i,j)表示图像在点(i,j)上的像素值,当图像为二值图像时,该值为1,即m00就是图像中白色像素点的综合,因此可用此来求出区域的面积。
33、图像的一阶矩的计算公式如下:
34、
35、当图像为二值图时,v(i,j)值即为1,m10就是图像上白色区域x轴坐标的累加,因此一阶矩可以用来求二值图像的中心坐标:
36、
37、进一步的,所述的机尾区域的特征值计算,包括区域的红火层厚度、温度值统计、黑框层面积以及气孔面积,其中对于红火层厚度的计算,将烧结机尾区域按照横轴从左到右分成6个部分,统计每个部分所有列中hsv三通道中明亮度值在[220,250]之间的像素点,再将该部分中所有列取平均值,得到该部分的红火层平均厚度;对于温度值统计,主要按照水平和垂直两个方向,水平方向,统计每列所有像素点明亮值的均值,作为该列的温度值指标,垂直方向,统计每行所有像素点明亮值的均值,作为该行的温度值指标;对于黑框层面积,也按照水平和垂直两个方向,水平方向,统计每列中明亮值在[10,100]的所有像素点,作为该列的黑框层面积,用来反映水平方向的布料均匀性,垂直方向,统计每行中明亮值在[10,100]的所有像素点,作为该行的黑框层面积,用来反映垂直方向的布料均匀性;最后对于气孔面积,统计机尾区域中所有明亮值大于250的像素点情况,将这些符合要求的像素点面积与像素点组成的区域个数作除,得到机尾区域的单位气孔面积,用来反映烧结过程中氧化亚铁(feo)的含量指标。
38、本发明提供的基于机器视觉的烧结机尾状态监测方法,通过图像处理,机器学习等手段,对烧结机尾的断面图像进行滤波去噪,直方图均衡化,增强目标与背景的对比度,再进行高斯模糊、色域转换,将原始图像转换至hsv图像,接着通过明亮度差异,区域坐标及面积计算,提取出机尾区域,最后计算机尾区域红火层厚度、气孔面积、黑框层面积等特征值,并通过设定的参数范围将计算出的特征值以文本和图表的形式进行输出,反馈给操作人员。通过烧结机尾状态监测系统的建立,实现了对烧结饼断面的智能识别、实时监测,并且能有效的指导提高工艺操作水平,降低了铁前成本、人力成本以及由人为因素导致的安全或生产问题,提高了钢铁企业的生产效率。本项目通过视觉识别方法,进一步实现了烧结工序段的智能控制及调度,推动我国钢铁冶金领域的智能制造转型升级及智能化发展。
- 还没有人留言评论。精彩留言会获得点赞!