面向自动驾驶测试的危险变道场景泛化生成方法及系统
本发明属于自动驾驶加速测试,具体涉及面向自动驾驶测试的危险变道场景泛化生成方法及系统。
背景技术:
1、近年来,自动驾驶汽车正在由测试示范逐步迈入量产商用阶段的过程中,自动驾驶上路前需经过数十亿英里的安全性测试,由于传统的道路、场地测试受测试效率、成本、场景等的限制,已经难以满足自动驾驶汽车测试的需求,利用虚拟仿真技术构建交通测试场景来测试自动驾驶车辆性能已成为一种重要的自动驾驶测试验证手段。为了实现自动驾驶的全方位测试,希望能够通过虚拟仿真技术,利用有效的场景生成方法,生成危险场景,发现被测自动驾驶系统的未知危险场景。现有的变道场景生成方法通过优化变道场景参数来构建危险测试场景,难以生成符合人驾车辆特征的不同切入角度的紧急变道轨迹,难以构建可从理论上避免的风险临界测试场景,不能满足自动驾驶高风险场景测试的需求。
技术实现思路
1、为解决了现有技术中存在的问题,本发明的目的是提供面向自动驾驶测试的危险变道场景泛化生成方法及系统,综合考虑自动驾驶高风险场景测试的需求,生成符合人驾车辆特征的不同切入角度的紧急变道轨迹,利用不同风险的背景车变道轨迹构建可从理论上避免的风险临界测试场景。
2、本发明采用的技术方案如下:
3、一种面向自动驾驶测试的背景车辆紧急变道轨迹生成方法,包括如下过程:
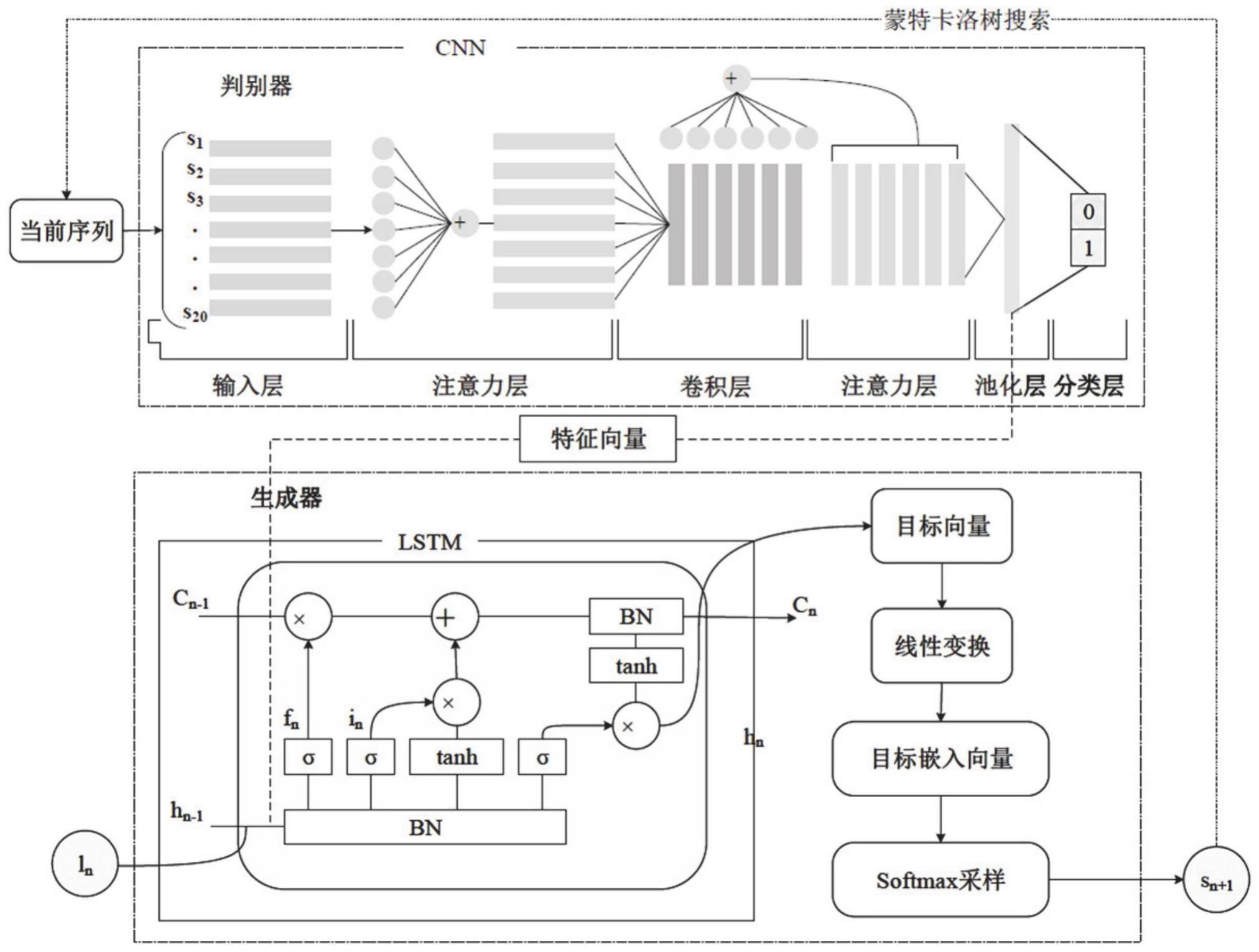
4、通过面向紧急变道轨迹生成的生成对抗模型,利用自动驾驶数据集中的紧急变道轨迹数据生成符合实际的背景车辆紧急变道轨迹数据;所述面向紧急变道轨迹生成的生成对抗模型为对序列生成对抗网络进行了生成器优化、判别器优化和损失函数设计后得到的模型。
5、优选的,生成器优化是在原始的序列生成对抗网络的生成器添加了批标准化运算;
6、添加了批标准化运算的生成器模型中遗忘门fn表达式如下:
7、
8、式中,σ是sigmoid函数,wf表示遗忘权重,hn-1表示前一层的隐藏状态,表示当前输入的内容,表示第m条紧急变道轨迹的第n个值;bf表示遗忘门偏置项,bn()表示批标准化操作;
9、所述生成器输入门由两个模块组成,生成器输入门的一个模块用于将筛选的数据信息保存到记忆细胞中,公式如下:
10、
11、其中,wi表示输入权重,bi表示输入门偏置项,in表示输入门;
12、生成器输入门的另一个模块用于把当前时刻传递的数据信息保存到记忆细胞中,公式如下:
13、
14、其中,wc和bc分别表示记忆细胞权重和记忆细胞偏置项,tanh表示激活函数,新的记忆细胞cn由遗忘门fn和输入门in更新,公式如下:
15、
16、其中,cn-1表示前一个记忆细胞;
17、生成器输出门on用于计算需要输出的信息,传递当前层的隐藏状态hn,公式如下:
18、
19、hn=on*tanh(bn(cn))
20、其中,wo和bo分别表示输出门权重和记忆细胞偏置项,hn-1表示前一层的隐藏状态,hn表示当前层的隐藏状态。
21、优选的,所述的判别器优化是对原始的序列生成对抗网络的判别器添加注意力机制,具体的,在原始判别器特征提取层的前后加入了注意力机制,公式如下:
22、
23、式中,q表示当前query的矩阵,k表示key的矩阵,v表示value的矩阵,其中q=k=v,q取值为数据的概率分布矩阵。
24、优选的,损失函数设计设计时,对于生成器:
25、生成器在预训练过程中使用的损失函数采用交叉熵损失函数;
26、生成器在对抗训练过程中使用的是策略梯度中的损失函数,策略梯度中的损失函数为对数损失乘以奖励值,表达式如下:
27、
28、其中,表示对θ的梯度算子,j(θ)表示生成器的奖励值,n表示一条紧急变道轨迹数据的序列长度,表示生成的第i条紧急变道轨迹的n-1个值,li表示生成器生成的值的空间,表示生成第n个值,gθ表示生成器,θ表示生成器参数,表示判别器,表示判别器参数,表示生成器和判别器的动作价值。
29、优选的,损失函数设计设计时,对于判别器:
30、判别器在预训练和对抗训练过程中的损失函数是一样的,使用交叉熵用作分类和预测任务的目标函数,使用对数损失函数来训练判别器,损失函数的表达式如下:
31、
32、其中,表示最小化判别器的参数,表示输入到判别器的值的数学期望,表示判别器,表示输入到生成器的值的数学期望,pdata表示真实紧急变道轨迹数据的分布,l表示输入到判别器的值。
33、本发明提供了一种用于实现本发明如上所述的面向自动驾驶测试的背景车辆紧急变道轨迹生成方法的装置,包括:
34、背景车辆紧急变道轨迹数据生成模块:用于通过面向紧急变道轨迹生成的生成对抗模型,利用自动驾驶数据集中的紧急变道轨迹数据生成符合实际的背景车辆紧急变道轨迹数据。
35、本发明提供了一种面向自动驾驶测试的危险变道场景泛化生成方法,包括以下步骤:
36、s1,利用车辆最短安全距离模型计算权利要求1所述面向自动驾驶测试的背景车辆紧急变道轨迹生成方法生成的每条背景车辆紧急变道轨迹数据对应的被测自动驾驶车辆的初始状态;
37、s2,结合权利要求1所得的背景车辆紧急变道轨迹数据和所述被测自动驾驶车辆的初始状态,生成紧急变道轨迹对应的危险变道场景;
38、s3,循环s1到s2,生成所有背景车辆紧急变道轨迹数据对应的危险变道场景。
39、优选的:解耦自动驾驶车辆的安全约束,建立得到所述车辆最短安全距离模型。
40、优选的,被测自动驾驶车辆的初始状态用以下公式计算:
41、
42、
43、
44、其中,dmin表示被测自动驾驶车辆与背景车辆最小安全距离,vav表示被测自动驾驶车辆初始速度,dh是被测自动驾驶车辆与背景车辆的初始横向距离,amax表示被测自动驾驶车辆的最大减速度,l表示背景车辆的长度,vhv表示背景车辆的行驶的平均速度,t1表示变减速运动阶段的时间,t2表示匀减速运动阶段的时间段。
45、本发明提供了一种面向自动驾驶测试的危险变道场景泛化生成系统,包括:
46、危险变道场景生成模块:用于利用本发明误伤所述的面向自动驾驶测试的危险变道场景泛化生成方法生成危险变道场景;
47、仿真交通场景生成模块:用于在unity3d中搭建仿真交通场景,并在搭建的仿真交通场景中注入背景车辆行驶轨迹和被测自动驾驶车辆所需要的数据;
48、测试模块:用于将所述危险变道场景中背景车辆运动轨迹和被测自动驾驶车辆初始状态注入到所述仿真交通场景中,测试自动驾驶车辆控制算法的有效性。
49、与现有技术相比,本发明具有如下有益效果:
50、本发明针对自动驾驶虚拟测试动态危险变道场景生成问题,基于公开自动驾驶数据集中的紧急变道轨迹数据,提出一种考虑人驾车辆特征的紧急变道轨迹对抗生成方法(bn-am-seqgan),构建基于安全距离的两车变道状态约束模型,计算风险临界场景下的被测自动驾驶车辆初始状态,提出危险场景泛化生成算法,生成危险变道变道场景,形成危险变道场景库。本发明解决了现有的变道场景生成方法通过优化变道场景参数来构建危险测试场景,难以生成符合人驾车辆特征的不同切入角度的紧急变道轨迹,难以构建可从理论上避免的风险临界测试场景,不能满足自动驾驶高风险场景测试需求的问题。
- 还没有人留言评论。精彩留言会获得点赞!