基于格拉姆角差场特征融合的非侵入式负荷识别方法
本发明涉及一种基于格拉姆角差场特征融合的非侵入式负荷识别方法。
背景技术:
1、“双碳”目标驱动下,电力行业正面临新一轮改革,全面向绿色低碳化转型。转型最重要的途径就是加强需求侧精细化管理,非侵入式负荷监测(non-intrusive loadmonitoring,nilm)作为智能电网需求侧精细化管理的关键技术之一,能通过智能电表采集的数据实时监测用户各电器类型、运行状态和能耗情况等信息,为用户优化自身用电模式提供决策依据,引导用户合理减少家庭用电量,提高家庭用电效率,推进节能减排,助力实现“碳达峰”和“碳中和”。
2、非侵入式负荷识别作为nilm的重要子任务之一,包含两个关键步骤:特征提取和负荷分类。早期国内外学者主要采用数学优化或传统机器学习算法提取特征及分类。文献[基于dtw算法与稳态电流波形的非侵入式负荷辨识方法]通过动态时间弯曲(dtw)算法计算负荷稳态波形与模版库波形的距离实现负荷识别,该算法利用稳态电流波形的可加性有效地降低了稳态电流提取时产生的相位误差,提升了负荷识别能力。文献[moderndevelopment of an adaptive non-intrusive appliance load monitoring system inelectricity energy conservation]提出了基于k最邻近算法和基于bp神经网络的两种负荷识别方法,并通过带fisher准则的人工免疫算法(aia)自适应调整模型参数来提升识别准确率。文献[基于k-nn结合核fisher判别的非侵入式负荷监测方法]构建了以负荷电流奇次谐波为特征的特征库,并通过adaboost算法筛选有效特征,得到更加精简的负荷特征库,最后将k最邻近算法与核fisher判别相结合实现家庭负荷识别,该方法兼顾识别精度和计算复杂度。上述方法主要通过提取采样数据的频率、相位或其他统计学特征实现负荷识别,计算量虽不高但识别准确率难以达到高水平。
3、随着深度学习技术的不断发展以及高频数据获取难度降低,从稳态或暂态数据中提取细粒度特征进行非侵入式负荷识别的研究越来越多。一些学者探索利用v-i轨迹来描述电器的特性,文献[electric load classification by binary voltage–currenttrajectory mapping]详细解释了可由v-i轨迹描述的物理特性,并验证了不同类型的负荷能通过v-i轨迹表征其独有的形状特征,获得较好的负荷识别效果。文献[基于特征融合与深度学习的非侵入式负荷辨识算法]提出了一种基于特征融合与深度学习的负荷辨识方法,通过在v-i轨迹中融入功率特征,解决了v-i轨迹无法体现设备功率大小的问题,提升了多状态负荷辨识能力。文献[基于v-i轨迹颜色编码的非侵入式负荷识别方法]先利用k-means聚类算法进行初步分类,然后将颜色编码后的v-i轨迹特征输入到alexnet神经网络进行负荷精细化分类。上述研究表明v-i轨迹及其二维图像表示能有效地用于非侵入式负荷识别任务,并且能利用深度学习算法提取到更深层次的特征来提升负荷识别的整体性能。
4、尽管上述方法已经成功将v-i轨迹应用于非侵入式负荷识别任务中,但由于v-i轨迹主要通过绘制归一化后的电压和电流获得,而部分电器的工作电压和电流相近,使得其v-i轨迹存在重叠现象,难以有效识别。
技术实现思路
1、为了解决上述技术问题,本发明提供一种算法简单、识别精度高的基于格拉姆角差场特征融合的非侵入式负荷识别方法。
2、本发明解决上述问题的技术方案是:一种基于格拉姆角差场特征融合的非侵入式负荷识别方法,包括以下步骤:
3、步骤一:对设备采集到的高频稳态数据进行预处理,获得一个完整基波周期电流和电压信号;
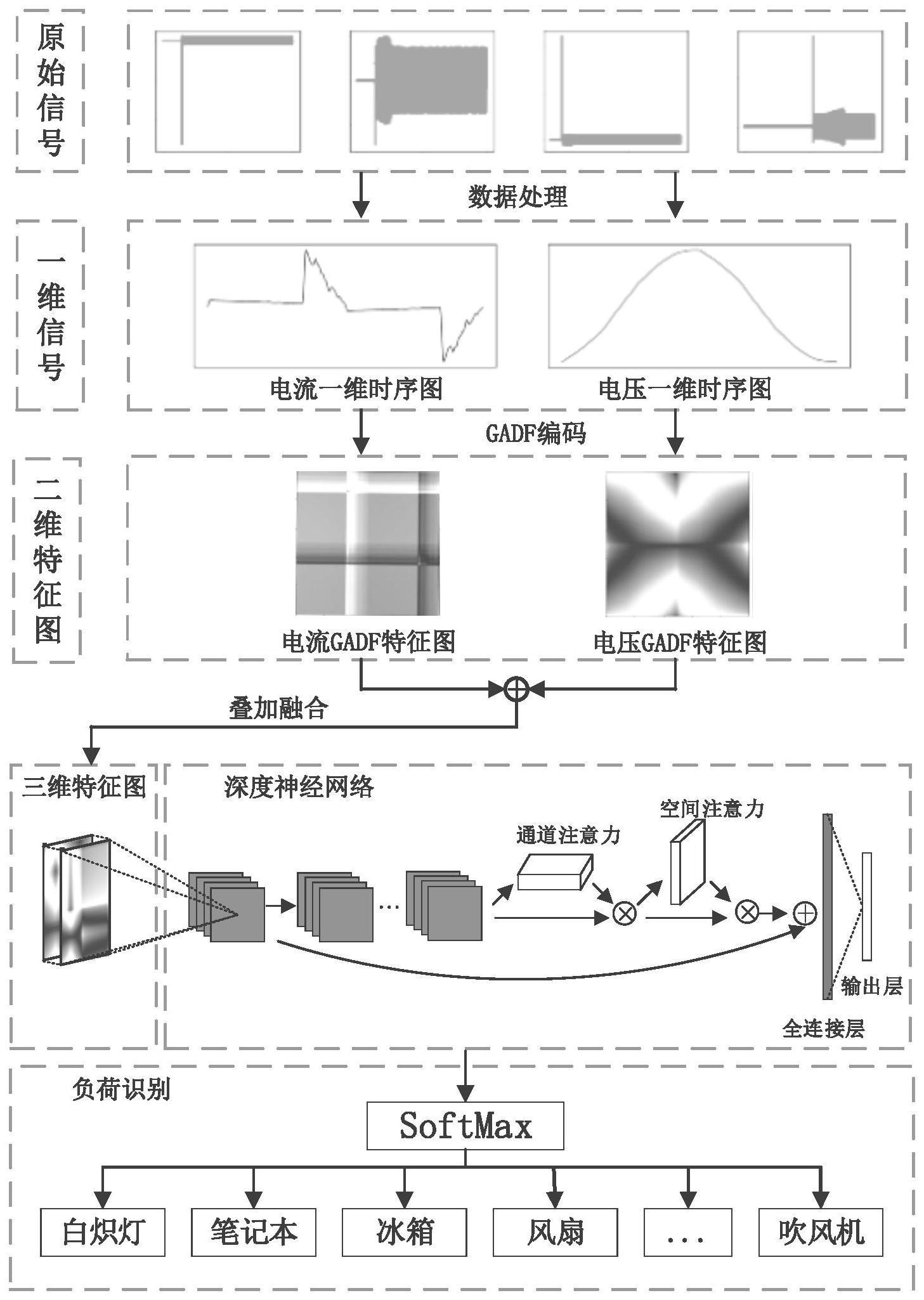
4、步骤二:利用格拉姆角差场分别对一维电压和电流信号进行编码,生成相对应的二维特征图;
5、步骤三:通过叠加融合输入到基于卷积块注意力模块的神经网络中,构建负荷识别模型,完成负荷识别。
6、上述基于格拉姆角差场特征融合的非侵入式负荷识别方法,所述步骤一具体过程为:
7、实现负荷识别的前提是先从高频聚合信号中提取负荷特征;假设同一时刻只有一个电器设备发生投切事件,即可在投切事件前后较短时间窗口通过计算稳态聚合信号差量来提取单个电器设备的负荷特征;采用有功功率变化差值δp作为电器设备投切事件检测的判断依据,从聚合电压、电流信号中提取各个电器设备的稳态电压、电流信号作为负荷特征;为了便于计算,分别用voff、ioff和von、ion表示电器设备投切事件前的稳态聚合电压、电流和投切事件后的稳态聚合电压、电流,单个电器设备的电压v取投切事件前后稳态聚合电压的平均值,即:
8、
9、相反,稳态聚合电流信号因电器设备投切事件的发生从而发生变化,单个电器设备电流i通过计算稳态聚合电流在投切事件前后的差值得到,即:
10、i=ion-ioff (2)
11、由于voff与von和ioff与ion需要在相同电压相位进行加减运算,而稳态电压信号的波形又近似正弦波,所以选择在电压正过零点处对齐;另外,稳态电压、电流信号呈周期性变化,所以单个基波周期的稳态电压、电流信号就用于表征电器设备的负荷特性,但电器设备稳定工作时其状态仍存在变化,为了更好表征电器设备的负荷特性,提取连续nt个基波周期的稳态电压、电流信号求平均,获得一个完整基波周期的稳态电压、电流信号,nt>1;
12、首先假设电器设备稳态电压、电流信号的采样频率为fs,基波频率为f,则每个基波周期样本数量为ns=fs/f,nt个基波周期的样本数量为nts=nt×ns,电器设备k的nt个基波周期稳态电压信号和稳态电流信号然后,让vk、ik在vk每个基波周期正过零点处对齐,得到对齐后的稳态电压信号和稳态电流信号如下:
13、
14、
15、式中:表示电器设备k第nts个对齐后的稳态电压值,表示电器设备k第nts个对齐后的稳态电流值;
16、最后,对和的每列求平均值,得到一个完整基波周期的稳态电压信号、电流信号一维向量和
17、上述基于格拉姆角差场特征融合的非侵入式负荷识别方法,所述步骤二中,格拉姆角差场是一种将一维时序信号转换为二维图像的编码方法,其具体编码步骤如下:
18、首先,对包含ns个时间戳的预处理获得的电器设备k的电压或电流进行归一化处理,将时序信号归一化至[-1,1]范围内,其公式如下:
19、
20、式中:xp表示或者中第p个值,表示xp归一化后的值,max表示求最大值函数,min表示求最小值函数;
21、然后,将归一化后的从笛卡尔坐标系转换到极坐标系,即将其数值转换为极坐标系中的角余弦φ,将时间戳转换为极坐标系中的半径r,转换公式如下:
22、
23、式中:φp表示极坐标系中第p个值的角余弦,rp表示极坐标系中第p个值的半径,tp表示第p个值的时间戳;n表示正则化极坐标系产生的常数因子,表示包含ns个归一化后的时序信号这种在极坐标系中表示时序信号的方式为理解时序信号提供了新思路,在时序信号转换到极坐标系后,把每个时间戳的时序信号作为一维度量空间,随着时间的推移,时序信号的幅值在跨越圆上不同的角点之间产生弯曲;
24、最后,通过正弦函数对转换到极坐标系上的点做角度差获得格拉姆角差场特征图,利用角度变化来识别不同时间间隔内的时间相关性;格拉姆角差场gadf定义公式如下:
25、
26、式中:表示极坐标系中第ns个值的角余弦,i表示单位行向量,表示的转置。
27、上述基于格拉姆角差场特征融合的非侵入式负荷识别方法,所述步骤二具体过程为:
28、首先,将预处理获得的一维电压信号和电流信号按照式(5)归一化至区间[-1,1];
29、接着,通过式(6)将归一化后电压、电流信号分别转换到极坐标系中,用极坐标系中的角度和半径r表征其幅值和时间戳;
30、然后,通过式(7)进行gadf矩阵变换,生成2个大小为ns×ns的二维特征图;
31、最后,将其叠加融合生成一个大小为2×ns×ns的三维特征图,作为负荷印记;为了增强三维特征图的特征表达能力,将特征图每个像素点数值都乘以256并进行向下取整处理,使得特征图的灰度值范围从[0,1]之间变成[0,255]之间。
32、上述基于格拉姆角差场特征融合的非侵入式负荷识别方法,所述步骤三中,卷积块注意力模块cbam由通道注意力子模块和空间注意力子模块组成;
33、假设给定一个特征图f∈rc×h×w作为输入,cbam依次推断出一维通道注意图mc∈rc×1×1和二维空间注意图ms∈r1×h×w,整个注意力过程概括如下:
34、
35、
36、式中:表示对应元素逐个相乘,在乘法操作过程中,通道注意值沿着空间维度广播,空间注意力值则沿着通道维度广播,f′表示通道注意力权重,f″表示最终输出注意力权重,r表示实数空间,c表示特征图的通道数,h表示特征图的长度,w表示特征图的宽度;
37、在通道注意力模块中,首先通过最大池化和平均池化分别对输入的特征图在空间维度进行压缩,聚合得到两个不同的空间特征描述符:和然后将这两个空间特征描述符传递到由多层感知机组成的共享网络中生成通道注意力图mc∈rc×1×1;为了减少参数开销,多层感知机的隐藏激活大小设置为rc/r×1×1,r为压缩比,通道注意力计算公式如下:
38、
39、式中:σ表示sigmoid函数,mlp表示多层感知机,avgpool表示平均池化,maxpool表示最大池化,w0∈rc/r×c和w1∈rc×c/r表示多层感知机的权值;
40、同样,空间注意力模块首先利用最大池化和平均池化在通道维度上对特征图进行压缩,生成两个二维特征图和然后将和两个特征图进行拼接得到一个包含2个通道数的三维特征图紧接着利用卷积核大小为7×7的卷积层对特征图进行卷积操作,得到二维特征图最后输入到sigmoid函数中生成二维空间注意力特征图ms∈rh×w;空间注意力的计算过程为:
41、
42、式中:f7×7表示卷积层的卷积核大小为7×7。
43、上述基于格拉姆角差场特征融合的非侵入式负荷识别方法,所述步骤三中,构建的负荷识别模型的结构包括输入单元、残差单元、cbam单元和输出单元;
44、在输入单元中,先通过输入层输入大小为2×ns×ns的负荷印记,再利用卷积层对负荷印记进行初步的特征提取,为了减少数据分布带来的影响,让卷积层提取的特征具有零均值和单位方差,在卷积层后添加批量归一化层,最后通过1个最大池化层来降低特征维度,进而减少后续单元的计算量,提升模型训练速度;输入单元卷积层的计算公式如下:
45、
46、
47、式中:表示卷积操作;表示第τ个卷积核上的第ω个权值;表示卷积操作第ω个输入值;b表示偏置;relu表示relu激活函数;xl表示经卷积操作得到的特征;
48、残差单元由恒等映射部分和残差部分构成,在输入单元基础上进行深层次特征提取,其表达式为:
49、xl+1=h(xl)+f(xl,wl) (13)
50、式中:h(xl)=w′lxl,其中w′l表示恒等映射中的1×1卷积操作,其用于调节输入输出的通道数;f(xl,wl)表示残差部分的映射函数;xl+1表示残差单元处理后得到的特征;
51、残差单元中的残差部分包括1个3×3卷积层和2个1×1卷积层,且每个卷积层后都会连接1个批量归一化层和1个relu激活函数;残差单元首先连接一个1×1卷积层,通道数设置为128;然后连接3×3卷积层,通道数设置为128,最后连接另一个1×1卷积层,通道数设置为512;恒等映射部分和残差部分提取的特征图通过逐像素相加操作进行融合;在残差部分的最后一层1×1卷积层接入cbam单元,使整个神经网络在提取负荷特征过程中专注于负荷印记图像的重要区域信息,忽略无关区域信息,增强整个网络特征学习能力,进而提升负荷识别任务性能;
52、输出单元由2个全连接层组成,是整个神经网络的最后一个单元,与残差单元相连;两个全连接层神经元数量分别为128和k,激活函数分别为relu函数和softmax函数,其中k由电器设备种类数量决定;为了训练整个神经网络获得最优参数,使用反向传播优化式(14)中定义的多分类交叉熵损失函数:
53、
54、式中,表示样本ζ的真实类别one-hot向量;表示样本ζ的预测类别one-hot向量;num表示样本数;k表示样本所属类别。
55、本发明的有益效果在于:本发明将格拉姆角差场理论应用于负荷印记构建中,增强了一维电压、电流信号的表征能力,进而提升了不同负荷特征之间的辨识度。此外,在负荷识别模型中引入卷积块注意力模块,帮助模型从负荷印记中获取更多负荷识别所需要的有用信息,抑制其他无用信息,进一步提升了负荷识别能力。经算例验证,本发明方法的平均识别准确率达到了98.36%,平均f1分数达到98.46%,通过对比实验的深入讨论与分析证明了本方法具有更好的识别能力。
- 还没有人留言评论。精彩留言会获得点赞!