基于太赫兹无线感知的触觉粗糙度测量模型训练方法、测量方法及设备
本发明涉及无线识别,尤其涉及一种基于太赫兹无线感知的触觉粗糙度测量模型训练方法、测量方法及设备。
背景技术:
1、触觉是除了视觉和听觉外,人类对物理世界进行探索的第三大感知方式,人类进行触觉感知主要依赖于遍布全身的触觉神经细胞,能够感知外界环境信息,如温度、湿度,以及外界物体对皮肤表面物理接触的刺激,如疼痛、压力、振动等方面的感觉,这些外界对皮肤表面的刺激能帮助我们认知粗糙程度、物体形状、物体大小、物体重量等信息,这些信息是人类进行生产生活等活动不可或缺的。
2、现有的粗糙度测量方法通常采用接触式的解决方案,可分为以下三种。方案一为基于接触式探针粗糙度测量方法,该方法需要将待测物体和测量设备进行垂直固定,且只能朝下测量,并且测量不同类型的物体需要配置不同的探测头,过程非常繁琐;方案二为基于视觉的可形变胶体粗糙度成像方法,该方法将可形变胶体挤压在被测物体上,可形变胶体后方设置摄像头进行拍照,利用预设深度学习模型将物体表面进行可视化,但此方法只能对表面进行定性地测量,无法进行定量地测量;方案三为基于白光干涉的方法,该方法主要用于实验室环境,是目前精度比较高的测量方法,理论极限能够测量原子粒度的表面粗糙度,但该技术本质上是光学3d建模,所需设备庞大且昂贵,并难以小型化,该方法在实施时,测量时间长、数据处理复杂,因此很难在实际测量进行普及。
技术实现思路
1、鉴于此,本发明实施例提供了一种基于太赫兹无线感知的粗糙度测量模型训练方法、测量方法及设备,以消除或改善现有技术中存在的一个或多个缺陷,解决现有粗糙度测量技术存在的测量时间长、测量过程繁琐、数据处理复杂以及必须接触测量的问题。
2、一方面,本发明提供一种基于太赫兹无线感知的触觉粗糙度测量模型训练方法,其特征在于,所述方法包括以下步骤:
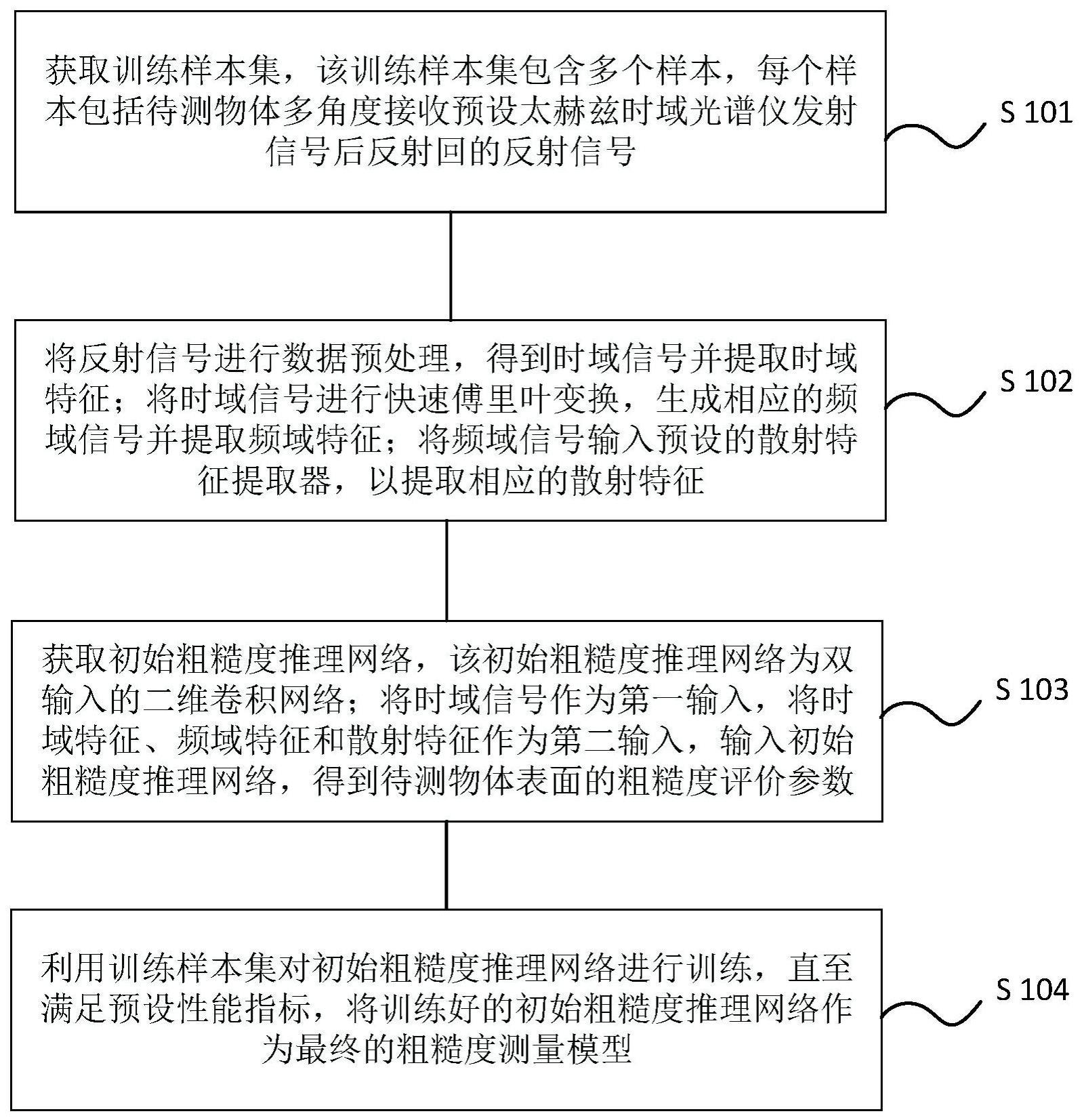
3、获取训练样本集,所述训练样本集包含多个样本,每个样本包括待测物体多角度接收预设太赫兹时域光谱仪发射信号后反射回的反射信号;所述待测物体固定在所述太赫兹时域光谱仪的收发天线的预设距离处;
4、将所述反射信号进行数据预处理,得到时域信号并提取时域特征;将所述时域信号进行快速傅里叶变换,生成相应的频域信号并提取频域特征;将所述频域信号输入预设的散射特征提取器,以提取相应的散射特征;所述散射特征提取器选用菲涅尔反射模型,并设有校正因子以评价所述待测物体表面的粗糙程度;
5、获取多材料粗糙度推理网络,所述多材料粗糙度推理网络为双输入的二维卷积网络;将所述时域信号作为第一输入,将所述时域特征、所述频域特征和所述散射特征作为第二输入,同时输入所述多材料粗糙度推理网络,以得到所述待测物体表面的粗糙度评价参数;
6、利用所述训练样本集对所述多材料粗糙度推理网络进行训练,直至满足预设性能指标,将训练好的多材料粗糙度推理网络作为最终的粗糙度测量模型。
7、在本发明的一些实施例中,还包括:
8、将所述反射信号进行数据预处理时,获取所述太赫兹时域光谱仪的频谱范围,对所述反射信号进行带通滤波处理;
9、将所述时域信号进行快速傅里叶变换之前,对所述时域信号进行2倍插值处理,以提升分辨率。
10、在本发明的一些实施例中,所述时域特征至少包括最高峰的第一个零点位置、第二个零点位置、最高峰所在位置、最高峰第一次到低谷位置的距离、第一次到低谷位置该低谷的高度、最高峰到低谷的距离、最高峰的高度、二分之一最高峰处的峰宽和积分;所述频域特征至少包括最高峰值的位置和最高峰的高度。
11、在本发明的一些实施例中,所述散射特征提取器选用菲涅尔反射模型,并设有校正因子以评价所述待测物体表面的粗糙程度,还包括:
12、若所述校正因子远小于1,则所述待测物体的表面粗糙度越低;
13、若所述校正因子接近于1,则所述待测物体的表面粗糙度中等;
14、若所述校正因子远大于1,则所述待测物体的表面粗糙度越高。
15、在本发明的一些实施例中,所述多材料粗糙度推理网络的第一输入通道内设有6个卷积层;第二输入通道内设有4个卷积层;在所述第一输入通道和所述第二输入通道之后还依次设有特征连接层和全连接层。
16、另一方面,本发明还提供一种基于太赫兹无线感知的触觉粗糙度测量方法,其特征在于,该方法包括以下步骤:
17、利用预设太赫兹时域光谱仪的收发天线分别向多个角度放置的待测物体发射信号,并接收对应角度反射回的反射信号;所述待测物体固定在所述收发天线的预设距离处;
18、将所述反射信号进行数据预处理,得到时域信号并提取时域特征;将所述时域信号进行快速傅里叶变换,生成相应的频域信号并提取频域特征;将所述频域信号输入预设的散射特征提取器,以提取相应的散射特征;
19、将所述时域信号作为第一输入,将所述时域特征、所述频域特征和所述散射特征作为第二输入,同时输入如上文中任意一项所述基于太赫兹无线感知的触觉粗糙度测量模型训练方法中的多材料粗糙度测量模型,以得到所述待测物体表面粗糙度评价参数。
20、另一方面,本发明还提供一种基于太赫兹无线感知的触觉粗糙度测量设备,其特征在于,所述设备用于执行如上文中任一项所述基于太赫兹无线感知的触觉粗糙度测量方法的步骤,所述设备包括:
21、太赫兹源,用于提供太赫兹信号;
22、收发天线,用于向待测物体发射太赫兹信号,并接收反射回的反射信号;
23、光学移动台,用于承载所述待测物体,并实现水平方向的移动与角度调整;
24、数据预处理模块,用于对所述反射信号进行数据预处理,得到时域信号并提取时域特征;对所述时域信号进行快速傅里叶变换,生成相应的频域信号并提取频域特征;基于预设的散射特征提取器提取所述频域信号的散射特征;
25、粗糙度推理模块,所述粗糙度推理模块包括训练得到的粗糙度测量模型,用于推理得到所述待测物体表面的粗糙度评价参数。
26、在本发明的一些实施例中,所述收发天线与所述待测物体之间设有预设长度的管道;所述管道的预设长度由所述收发天线内置透镜的焦距决定。
27、在本发明的一些实施例中,所述数据预处理模块还包括带通滤波器,用于对所述反射信号进行带通滤波处理。
28、另一方面,本发明还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上文中提及的任意一项所述方法的步骤。
29、本发明的有益效果至少是:
30、本发明提供一种基于太赫兹无线感知的触觉粗糙度测量模型训练方法、测量方法及设备,包括:获取包含多个待测物体多角度的太赫兹反射信号,以构建训练样本集;对反射信号依次进行数据预处理、快速傅里叶变换和散射特征提取,分别得到时域信号及其时域特征、频域信号及其频域特征和散射特征;获取多材料粗糙度推理网络,该多材料粗糙度推理网络为双输入的二维卷积网络,将时域信号作为其第一输入,将时域特征、频域特征和散射特征作为其第二输入;利用训练样本集对多材料粗糙度推理网络进行训练,最终得到粗糙度测量模型。本发明利用多角度的测量信息、粗糙度与散射特征的关系,排除待测物体自身材料因素的影响;并基于太赫兹利用训练得到的粗糙度测量模型从多方面评估待测物体表面的粗糙度评价参数,最终实现无接触的高精度的物体表面粗糙度测量。
31、本发明的附加优点、目的,以及特征将在下面的描述中将部分地加以阐述,且将对于本领域普通技术人员在研究下文后部分地变得明显,或者可以根据本发明的实践而获知。本发明的目的和其它优点可以通过在说明书以及附图中具体指出的结构实现到并获得。
32、本领域技术人员将会理解的是,能够用本发明实现的目的和优点不限于以上具体所述,并且根据以下详细说明将更清楚地理解本发明能够实现的上述和其他目的。
- 还没有人留言评论。精彩留言会获得点赞!