交通信号灯感知方法、车辆控制方法、设备、介质及车辆与流程
本发明涉及自动驾驶,具体涉及一种交通信号灯感知方法、车辆控制方法、设备、介质及车辆。
背景技术:
1、交通信号灯通常由红灯、绿灯、黄灯组成,红灯表示禁止通行,绿灯表示允许通行,黄灯表示警示。在对车辆进行自动驾驶控制时需要准确地感知得到道路中交通信号灯的颜色,才能根据交通信号灯的颜色对车辆进行安全、可靠地的驾驶控制,保证车辆的行车安全。
2、在道路的同一路口区域(比如十字路口区域)可能会存在多个路口,每个路口都设置单独的交通信号灯且每个交通信号灯会包含多个单灯。目前常规的交通信号灯感知方法,在对交通信号灯的图像帧进行感知识别时,很容易将位于不同路口的单灯误识别成位于同一个路口,且无法准确识别每个单灯显示的颜色。
3、相应地,本领域需要一种新的技术方案来解决上述问题。
技术实现思路
1、为了克服上述缺陷,提出了本发明,以提供解决或至少部分地解决如何准确感知交通信号灯颜色的技术问题的交通信号灯感知方法、车辆控制方法、设备、介质及车辆。
2、在第一方面,提供一种交通信号灯的感知方法,包括:
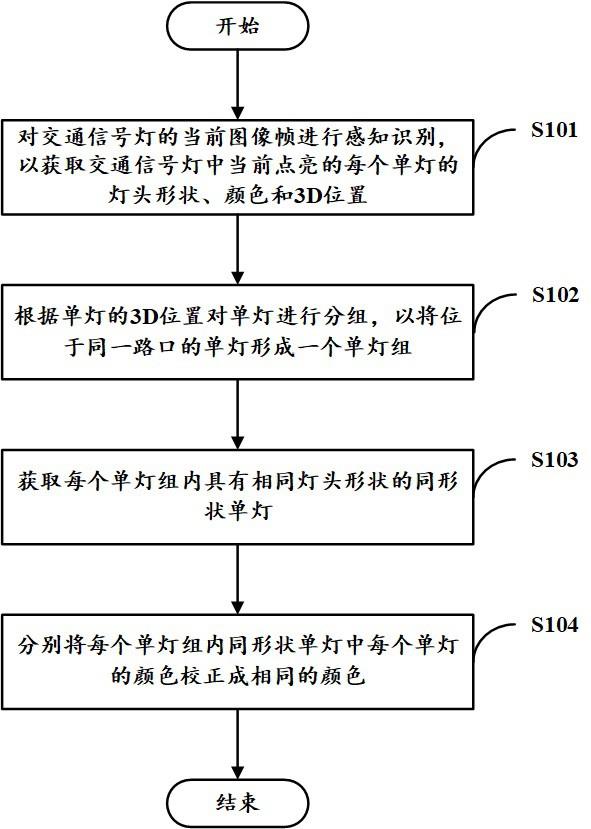
3、对交通信号灯的当前图像帧进行感知识别,以获取所述交通信号灯中当前点亮的每个单灯的灯头形状、颜色和3d位置;
4、根据所述单灯的3d位置对所述单灯进行分组,以将位于同一路口的单灯形成一个单灯组;
5、获取每个单灯组内具有相同灯头形状的同形状单灯;
6、分别将每个单灯组内所述同形状单灯中每个单灯的颜色校正成相同的颜色。
7、在上述交通信号灯的感知方法的一个技术方案中,“根据所述单灯的3d位置对所述单灯进行分组,以将位于同一路口的单灯形成一个单灯组”的步骤具体包括:
8、遍历每个单灯的3d位置,对所述单灯进行分组;
9、获取在遍历完每个单灯的3d位置之后形成的多个单灯组;
10、对所述多个单灯组进行两两合并处理,以将位于同一路口的单灯形成最终的单灯组。
11、在上述交通信号灯的感知方法的一个技术方案中,“遍历每个单灯的3d位置,对所述单灯进行分组”的步骤具体包括:
12、根据所述单灯的3d位置与已形成的单灯组的中心位置,判断是否将所述单灯加入所述已形成的单灯组中;
13、若是,则将所述单灯加入所述已形成的单灯组中并更新所述已形成的单灯组的中心位置;
14、若否,则创建一个新的单灯组、将所述单灯加入所述新的单灯组并更新所述新的单灯组的中心位置。
15、在上述交通信号灯的感知方法的一个技术方案中,“对所述多个单灯组进行两两合并处理,以将位于同一路口的单灯形成最终的单灯组”的步骤具体包括:
16、按照预设的单灯组编号的排列顺序,对所述多个单灯组进行两两合并处理,以获取初步合并的单灯组;
17、按照预设的单灯组编号的排列顺序,再次对所述初步合并的单灯组进行两两合并处理,直至单灯组的数量不再发生变化,以获取所述最终的单灯组。
18、在上述交通信号灯的感知方法的一个技术方案中,“对所述多个单灯组进行两两合并处理,以将位于同一路口的单灯形成最终的单灯组”的步骤还包括通过下列方式对两个单灯组进行合并处理:
19、获取两个单灯组的中心位置之间的中心距离;
20、分别获取两个单灯组的半径;
21、判断所述中心距离是否小于所述半径中的最大值;
22、若是,则对两个单灯组进行合并;
23、若否,则不对两个单灯组进行合并。
24、在上述交通信号灯的感知方法的一个技术方案中,所述方法还包括通过下列方式更新单灯组的半径:
25、获取所述单灯组中单灯到所述单灯组的中心位置之间的最大距离;
26、根据所述最大距离,更新所述单灯组的半径。
27、在上述交通信号灯的感知方法的一个技术方案中,“分别将每个单灯组内所述同形状单灯中每个单灯的颜色校正成相同的颜色”的步骤具体包括:
28、针对所述同形状单灯中的每个单灯,获取所述单灯分别显示每种不同颜色的置信度;
29、从所述同形状单灯中所有单灯分别显示每种不同颜色的置信度中,选取置信度最高的颜色;
30、将所述同形状单灯中每个单灯的颜色校正成所述置信度最高的颜色。
31、在上述交通信号灯的感知方法的一个技术方案中,“从所述同形状单灯中所有单灯分别显示每种不同颜色的置信度中,选取置信度最高的颜色”的步骤具体包括:
32、针对每种颜色,分别获取每个单灯显示所述颜色的置信度并对所述置信度进行加和计算,以获取所述颜色的加和置信度;
33、根据每种颜色的加和置信度,选取置信度最高的颜色。
34、在上述交通信号灯的感知方法的一个技术方案中,“根据每种颜色的加和置信度,选取置信度最高的颜色”的步骤包括:
35、分别对每种颜色的加和置信度进行归一化处理,以获取每种颜色的归一化置信度;
36、根据每种颜色的归一化置信度,选取置信度最高的颜色。
37、在上述交通信号灯的感知方法的一个技术方案中,在“分别将每个单灯组内所述同形状单灯中每个单灯的颜色校正成相同的颜色”的步骤之后,所述方法还包括通过下列方式对通过当前图像帧得到的单灯的颜色进行跟踪平滑:
38、获取位于当前图像帧之前多个连续的历史图像帧;
39、分别获取通过每个所述历史图像帧得到的所述单灯的颜色;
40、对通过当前图像帧和所述历史图像帧得到的所述单灯的颜色进行投票处理,选取数量最多的一种颜色作为通过当前图像帧得到的所述单灯的最终颜色。
41、在第二方面,提供一种交通信号灯的感知方法,包括:
42、采用前述第一方面提供的交通信号灯的感知方法,获取交通信号灯中当前点亮的单灯的灯头形状、颜色和所在单灯组;
43、根据所述单灯所在单灯组,确定所述单灯所在路口;
44、根据所述单灯的灯头形状与所在路口,确定所述路口的交通信号灯对应的虚拟灯的交通指示方向;
45、根据所述单灯的颜色,确定所述交通指示方向的颜色,以形成虚拟灯。
46、在第三方面,提供一种车辆控制方法,所述方法包括:
47、获取位于车辆前向方向的交通信号灯的图像帧;
48、采用前述第二方面提供的交通信号灯的感知方法,并根据所述图像帧获取所述交通信号灯对应的虚拟灯;
49、确定所述虚拟灯所在的路口;
50、根据所述虚拟灯的每个交通指示方向的颜色,对车辆在所述路口进行自动驾驶控制。
51、在第四方面,提供一种计算机设备,该计算机设备包括处理器和存储装置,所述存储装置适于存储多条程序代码,所述程序代码适于由所述处理器加载并运行以执行上述交通信号灯的感知方法或车辆控制方法的技术方案中任一项技术方案所述的方法。
52、在第五方面,提供一种计算机可读存储介质,该计算机可读存储介质其中存储有多条程序代码,所述程序代码适于由处理器加载并运行以执行上述交通信号灯的感知方法或车辆控制方法的技术方案中任一项技术方案所述的方法。
53、在第六方面,提供一种车辆,该车辆包括上述计算机设备的技术方案所述的计算机设备。
54、本发明上述一个或多个技术方案,至少具有如下一种或多种有益效果:
55、在实施本发明提供的交通信号灯的感知方法的技术方案中,首先可以对交通信号灯的当前图像帧进行感知识别,以获取交通信号灯中当前点亮的每个单灯的灯头形状、颜色和3d位置,然后根据单灯的3d位置对单灯进行分组,以将位于同一路口的单灯形成一个单灯组,获取每个单灯组内具有相同灯头形状的同形状单灯,分别将每个单灯组内同形状单灯中每个单灯的颜色校正成相同的颜色。通过上述方法可以准确地确定出单灯所在路口,同时还可以避免将同一路口内相同灯头形状的单灯识别出不同的颜色,保证车辆的行车安全。
56、在实施本发明提供的另一个交通信号灯的感知方法的技术方案中,首先可以采用前述交通信号灯的感知方法,获取交通信号灯中当前点亮的单灯的灯头形状、颜色和所在单灯组,根据单灯所在单灯组确定单灯所在路口,根据单灯的灯头形状与所在路口,确定路口的交通信号灯对应的虚拟灯的交通指示方向,根据单灯的颜色确定交通指示方向的颜色,以形成虚拟灯。通过上述方式,对于任意类型的交通信号灯,都可以统一表达成由交通指示方向及其颜色形成的虚拟灯,在对车辆进行控制时只需要从虚拟灯中查询交通指示方向的颜色即可。
57、在实施本发明提供的车辆控制方法的技术方案中,在获取位于车辆前向方向的交通信号灯的图像帧之后,可以采用前述交通信号灯的感知方法并根据图像帧获取交通信号灯对应的虚拟灯,确定虚拟灯所在的路口,根据虚拟灯的每个交通指示方向的颜色,对车辆在路口进行自动驾驶控制。通过上述方法,可以在不依赖高精地图的情况下准确得到每个路口交通信号灯的状态,进而能够对车辆进行安全、可靠地自动驾驶控制,提高车辆的行车安全。
- 还没有人留言评论。精彩留言会获得点赞!