一种矩形料场动态堆位维护方法及设备与流程
本发明属于领域,具体涉及一种矩形料场动态堆位维护方法及设备。
背景技术:
1、在冶金、电力企业和散货码头的原料场中,堆位的管理是必不可少的,其中堆位不固定矩形料场中,堆位的区间和物料品种均随堆取作业不断变化,且料堆形状随着反复堆、取作业后极其不规则。很多常规料场中,料场图仅反映了各种物料料堆在料场中的大致位置和布局顺序,作业时堆取料机操作人员根据布局顺序、物料颜色和个人经验寻找目标料堆;在实现堆取料机远程监控的无人化料场中,堆取料机的精确定位和料场三维模型的建立为堆位管理提供了必要信息,可以通过料场三维模型手动或自动完成堆位维护,但是三维模型本身的干扰数据增加了自动分堆错误概率。随着无人化、智能化料场技术的普及,矩形料场的堆位需要一种自动可靠的维护方法。
技术实现思路
1、本发明的目的在于,提供一种矩形料场动态堆位维护方法及设备,完成矩形料场动态堆位维护。
2、为了实现上述目的,本发明的技术方案为:
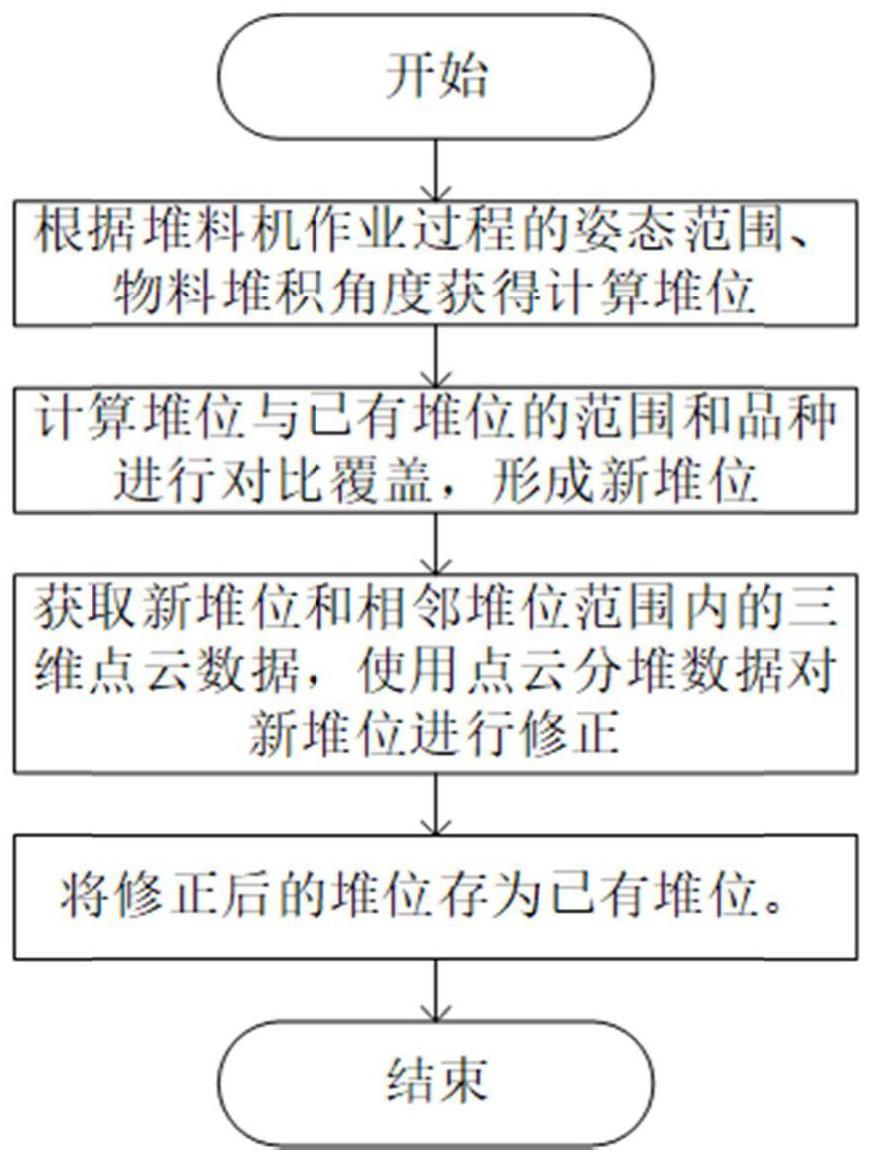
3、一种矩形料场动态堆位维护方法,该方法包括以下步骤:
4、获取单次堆料作业的计算堆位;堆位数据包括料堆区间及物料品种;
5、将计算堆位与已有堆位进行对比覆盖,形成新堆位;
6、获取新堆位及其相邻堆位的三维点云数据,使用点云分堆数据对新堆位进行修正,并将修正后的堆位存为已有堆位。
7、进一步的,获取单次堆料作业的计算堆位包括:
8、根据堆料机的位姿、堆料机悬臂端部与堆料表面的垂直距离和物料堆积角度获得单次堆料作业的料堆区间;其中,堆料机的位姿包括堆料机悬臂回转中心在走行方向的位置、悬臂回转角度、悬臂俯仰角度、悬臂俯仰中心与地面的垂直距离和悬臂长度;
9、再结合料堆物料品种,得到单次堆料作业的计算堆位。
10、进一步的,根据作业起点的物料信息获得物料品种。
11、进一步的,获取单次堆料作业的计算堆位具体为:
12、堆料时实时计算物料堆积的理论区间[xtb,xte]:
13、xtb=x+l·cosβ·cosα-(h0+l·sinβ-h)·cotθ
14、xte=x+l·cosβ·cosα+(h0+l·sinβ-h)·cotθ
15、式中,x为堆料机悬臂回转中心在走行方向的位置,α为悬臂回转角度,β为悬臂俯仰角度,h0为悬臂俯仰中心与地面的垂直距离,l为悬臂长度,h为堆料机悬臂端部与堆料表面的垂直距离,θ为物料堆积角度;
16、获得单次堆料作业的料堆区间[xcbj,xcej]:
17、xcbj=minxtb
18、xcej=maxxte
19、式中,xcbj为堆位起点位置,xcej为堆位终点位置;
20、获取料堆物料品种mcj,得到单次堆料作业的计算堆位[xcbj,xcej]|mcj。
21、进一步的,将计算堆位与已有堆位进行对比覆盖,形成新堆位包括:
22、记计算堆位为[xcbj,xcej]|mcj;其中,xcbj为计算堆位起点位置,xcej为计算堆位终点位置,mcj为计算堆位物料品种;
23、记已有堆位为{[xrb1,xre1]|mr1,[xrb2,xre2]|mr2,…[xrbi,xrei]|mri…[xrbn,xren]|mrn};其中,xrbi为第i堆位起点位置,xrei为第i堆位终点位置,mri为第i堆位物料品种,n为已有堆位总数;
24、遍历已有堆位{[xrb1,xre1]|mr1,[xrb2,xre2]|mr2,…[xrbi,xrei]|mri…[xrbn,xren]|mrn},与计算堆位[xcbj,xcej]|mcj对比:
25、若xrbi≥xcej或xrei≤xcbj,则[xcbj,xcej]|mcj保持不变,i=i+1,继续对比;
26、若xrbi≥xcbj且xrei≤xcej,则[xcbj,xcej]|mcj保持不变,[xrbi,xrei]|mri被[xcbj,xcej]|mcj覆盖,删除[xrbi,xrei]|mri,i=i+1,继续对比;
27、若xrbi≥xcbj且xrei>xcej,则进一步对比物料品种:
28、a)若mri=mcj,则[xrbi,xrei]|mri与[xcbj,xcej]|mcj合并为[xcbj,xcej]|mcj,(xcej=xrei),删除[xrbi,xrei]|mri,i=i+1,继续对比;
29、b)若mri≠mcj,则[xcbj,xcej]|mcj保持不变,[xrbi,xrei]|mri替换为新堆位[x′rbi,xrei]|mri,(x′rbi=xcej),i=i+1,[xcbj,xcej]|mcj继续对比;
30、若xrbi<xcbj且xrei≤xcej,则进一步对比物料品种:
31、a)若mri=mcj,则[xrbi,xrei]|mri与[xcbj,xcej]|mcj合并为[xcbj,xcej]|mcj,(xcbj=xrbi),删除[xrbi,xrei]|mri,i=i+1,继续对比;
32、b)若mri≠mcj,则[xcbj,xcej]|mcj保持不变,[xrbi,xrei]|mri替换为新堆位[xrbi,x′rei]|mri,(x′rei=xcbj),i=i+1,[xcbj,xcej]|mcj继续对比;
33、若xrbi<xcbj且xrei>xcej,则进一步对比物料品种:
34、a)若mri=mcj,则[xcbj,xcej]|mcj=[xrbi,xrei]|mrj,删除[xrbi,xrei]|mrj,结束对比;
35、b)若mri≠mcj,则[xcbj,xcej]|mcj保持不变,[xrbi,xrei]|mri变为2个堆位[xrbi,x′rei]|mri,(x′rei=xcbj)和[x′rbi,xrei]|mri,(x′rbi=xcej),结束对比。
36、进一步的,新堆位修正如下:
37、a)记新堆位为[xmb,xme]|mm,取与新堆位相邻的两个堆位的料堆区间[xmb-,xme-]和[xmb+,xme+];
38、b)获取区间[xmb-,xme+]内由三维点云识别的堆位区间对{[xsbk,xsek]},k=0,1,2;
39、c)若存在堆位区间对[xsbk0,xsek0]∈[xmb,xme],进一步:
40、ⅰ)若存在堆位区间对[xsbk1,xsek1](xsbk1<xmb<xsek1),则取xmb=xme-=xsek1;
41、ⅱ)若存在堆位区间对[xsbk2,xsek2](xsbk2<xme<xsek2),则取xme=xmb+=xsbk2;
42、d)若存在堆位区间对进一步:
43、ⅰ)若存在堆位区间对[xsbk1,xsek1](xmb-<xsek1<xme-),则取xmb=xme-=xsek1;
44、ⅱ)若存在堆位区间对[xsbk2,xsek2](xmb+<xsbk2<xme+),则取xme=xmb+=xsbk2。
45、一种用于实现上述所述的矩形料场动态堆位维护方法的矩形料场动态堆位维护设备,包括:
46、堆位信息系统,用于存储和查询已有堆位信息;
47、激光扫描系统,用于提供料场料堆三维点云数据,并进行分堆;
48、高度检测装置,用于检测堆料机悬臂端部与堆料表面的垂直距离;
49、物料堆积角度模块,用于存储或计算获取各品种或堆位物料的堆积角度。
50、本发明与现有技术相比,具有以下优点及有益效果:
51、本发明结合记录的已有堆位信息、根据堆料作业过程数据得到的计算堆位信息和由三维点云自动分堆获取的料堆区间信息三者进行对比校验,自动完成矩形料场动态堆位维护,避免了理论计算存在偏差的缺点,也避免了由于料场中其他机械设备或相邻料堆距离过近导致单纯依靠激光扫描点云数据分堆错误的问题。
- 还没有人留言评论。精彩留言会获得点赞!