目标物体的属性信息确定装置、车辆、方法及程序产品与流程
本技术涉及数据处理,尤其涉及目标物体的属性信息确定装置、车辆、方法及程序产品。
背景技术:
1、以自动驾驶为例,通过在线或者离线的方式来构建地图,是自动驾驶中尤为重要的一部分。为了满足构建地图的需求,通常需要对环境中包含的路牌、信号灯杆、车道线等目标物体进行识别,识别结果可以包含目标物体的语义类别、外接矩形框位置信息、轮廓信息以及关键点位置信息等类型的属性信息。
2、然而,如何既快捷又准确的确定目标物体的上述各属性信息,目前确尚没有很好的解决方案,因此亟需一种可以既快捷又准确的确定目标物体的各属性信息的技术方案。
技术实现思路
1、本技术提供了一种目标物体的属性信息确定装置、车辆、方法及程序产品,用于既快捷又准确的确定目标物体的各属性信息。
2、第一方面,本技术提供了一种目标物体的属性信息确定装置,所述装置包括处理模块,其中:
3、所述处理模块,用于获得待处理图像,将所述待处理图像分别输入至少两个预先训练完成的确定属性信息的子模型中,基于各子模型的输出结果,确定所述待处理图像中包含的目标物体的各属性信息;
4、其中,各子模型的输出结果中包含的属性信息的类型是不重叠的,至少一个子模型的输出结果中包含至少两种类型的属性信息,且针对输出结果中包含属性信息类型为语义类别的子模型,该子模型的输出结果中包含的属性信息的类型总数不大于两种。
5、在一种可能的实施方式中,所述处理模块,具体用于:
6、若待获得的属性信息的类型包括外接矩形框位置信息、轮廓信息、语义类别和关键点位置信息,则将所述待处理图像分别输入三个预先训练完成的确定属性信息的子模型中;
7、基于所述三个子模型中的其中一个子模型的输出结果,确定所述待处理图像中包含的目标物体的任意两种属性信息;
8、基于所述三个子模型中的其他两个子模型各自的输出结果,分别确定所述待处理图像中包含的目标物体的任意一种属性信息。
9、在一种可能的实施方式中,所述处理模块,具体用于:
10、确定所述待处理图像中包含的目标物体的外接矩形框位置信息及轮廓信息。
11、在一种可能的实施方式中,所述处理模块,具体用于:
12、若待获得的属性信息的类型包括外接矩形框位置信息、轮廓信息、语义类别和关键点位置信息,则将所述待处理图像分别输入两个预先训练完成的确定属性信息的子模型中;
13、基于所述两个子模型各自的输出结果,分别确定所述待处理图像中包含的目标物体的任意两种属性信息。
14、在一种可能的实施方式中,所述处理模块,具体用于:
15、若待获得的属性信息的类型包括外接矩形框位置信息、轮廓信息、语义类别和关键点位置信息,则将所述待处理图像分别输入两个预先训练完成的确定属性信息的子模型中;
16、基于所述两个子模型中的其中一个子模型的输出结果,确定所述待处理图像中包含的目标物体的外接矩形框位置信息、轮廓信息及关键点位置信息;
17、基于所述两个子模型中的另一个子模型的输出结果,确定所述待处理图像中包含的目标物体的语义类别。
18、在一种可能的实施方式中,所述处理模块,具体用于:
19、若待获得的属性信息的类型包括外接矩形框位置信息、轮廓信息、语义类别和关键点位置信息,将所述待处理图像输入预先训练完成的至少能够确定外接矩形框位置信息的子模型中,其中,该子模型的输出结果至少能够确定待处理图像中包含的目标物体的外接矩形框位置信息;
20、基于所述目标物体的外接矩形框位置信息,获得所述待处理图像中所述目标物体的子图像;将所述子图像输入预先训练完成的确定其他属性信息的子模型中。
21、在一种可能的实施方式中,所述处理模块,具体用于:
22、基于所述外接矩形框位置信息,确定所述各子模型的输出结果中,归属于同一目标物体的各属性信息,获得所述待处理图像中包含的至少一种目标物体的各属性信息。
23、第二方面,本技术提供了一种车辆,所述车辆包括如第一方面中任一项所述的目标物体的属性信息确定装置。
24、第三方面,本技术提供了一种目标物体的属性信息确定方法,所述方法包括:
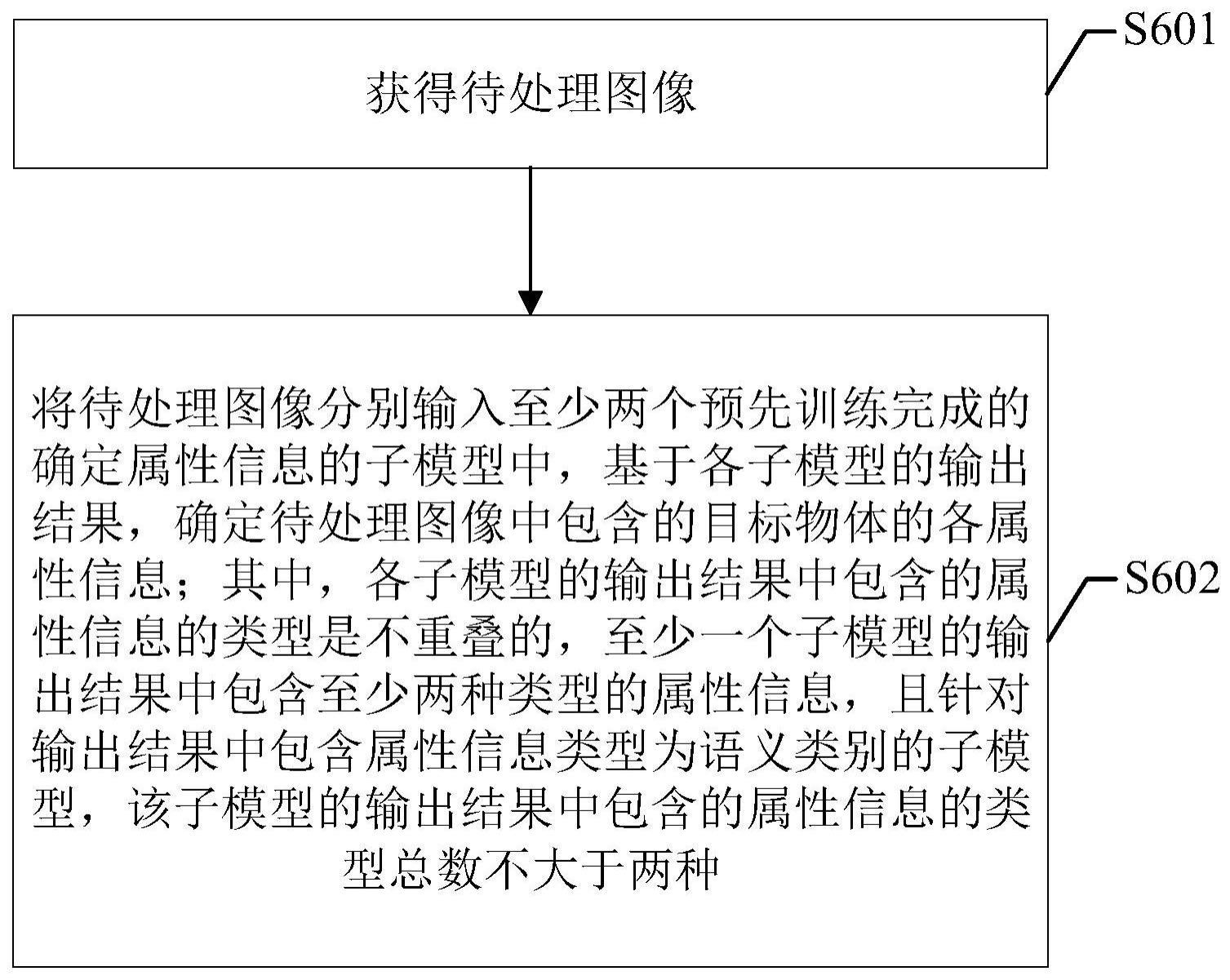
25、获得待处理图像;
26、将所述待处理图像分别输入至少两个预先训练完成的确定属性信息的子模型中,基于各子模型的输出结果,确定所述待处理图像中包含的目标物体的各属性信息;
27、其中,各子模型的输出结果中包含的属性信息的类型是不重叠的,至少一个子模型的输出结果中包含至少两种类型的属性信息,且针对输出结果中包含属性信息类型为语义类别的子模型,该子模型的输出结果中包含的属性信息的类型总数不大于两种。
28、在一种可能的实施方式中,所述将所述待处理图像分别输入至少两个预先训练完成的确定属性信息的子模型中,包括:
29、若待获得的属性信息的类型包括外接矩形框位置信息、轮廓信息、语义类别和关键点位置信息,则将所述待处理图像分别输入三个预先训练完成的确定属性信息的子模型中;
30、所述基于各子模型的输出结果,确定所述待处理图像中包含的目标物体的各属性信息,包括:
31、基于所述三个子模型中的其中一个子模型的输出结果,确定所述待处理图像中包含的目标物体的任意两种属性信息;
32、基于所述三个子模型中的其他两个子模型各自的输出结果,分别确定所述待处理图像中包含的目标物体的任意一种属性信息。
33、在一种可能的实施方式中,所述确定所述待处理图像中包含的目标物体的任意两种属性信息,包括:
34、确定所述待处理图像中包含的目标物体的外接矩形框位置信息及轮廓信息。
35、在一种可能的实施方式中,所述将所述待处理图像分别输入至少两个预先训练完成的确定属性信息的子模型中,包括:
36、若待获得的属性信息的类型包括外接矩形框位置信息、轮廓信息、语义类别和关键点位置信息,则将所述待处理图像分别输入两个预先训练完成的确定属性信息的子模型中;
37、所述基于各子模型的输出结果,确定所述待处理图像中包含的目标物体的各属性信息,包括:
38、基于所述两个子模型各自的输出结果,分别确定所述待处理图像中包含的目标物体的任意两种属性信息。
39、在一种可能的实施方式中,所述将所述待处理图像分别输入至少两个预先训练完成的确定属性信息的子模型中,包括:
40、若待获得的属性信息的类型包括外接矩形框位置信息、轮廓信息、语义类别和关键点位置信息,则将所述待处理图像分别输入两个预先训练完成的确定属性信息的子模型中;
41、所述基于各子模型的输出结果,确定所述待处理图像中包含的目标物体的各属性信息,包括:
42、基于所述两个子模型中的其中一个子模型的输出结果,确定所述待处理图像中包含的目标物体的外接矩形框位置信息、轮廓信息及关键点位置信息;
43、基于所述两个子模型中的另一个子模型的输出结果,确定所述待处理图像中包含的目标物体的语义类别。
44、在一种可能的实施方式中,所述将所述待处理图像分别输入至少两个预先训练完成的确定属性信息的子模型中,包括:
45、若待获得的属性信息的类型包括外接矩形框位置信息、轮廓信息、语义类别和关键点位置信息,将所述待处理图像输入预先训练完成的至少能够确定外接矩形框位置信息的子模型中,其中,该子模型的输出结果至少能够确定待处理图像中包含的目标物体的外接矩形框位置信息;
46、基于所述目标物体的外接矩形框位置信息,获得所述待处理图像中所述目标物体的子图像;将所述子图像输入预先训练完成的确定其他属性信息的子模型中。
47、在一种可能的实施方式中,所述基于各子模型的输出结果,确定所述待处理图像中包含的目标物体的各属性信息,包括:
48、基于所述外接矩形框位置信息,确定所述各子模型的输出结果中,归属于同一目标物体的各属性信息,获得所述待处理图像中包含的至少一种目标物体的各属性信息。
49、第四方面,本技术提供了一种计算机程序产品,包括计算机程序/指令,当所述计算机程序/指令处理器被执行时实现如第三方面中任一项所述的方法。
50、由于本技术可以获得待处理图像,将该待处理图像分别输入至少两个预先训练完成的确定属性信息的子模型中,基于各子模型的输出结果,确定待处理图像中包含的目标物体的各属性信息;并且本技术各子模型的输出结果中包含的属性信息的类型是不重叠的,至少一个子模型的输出结果中包含至少两种类型的属性信息,且针对输出结果中包含属性信息类型为语义类别的子模型,该子模型的输出结果中包含的属性信息的类型总数不大于两种。相较于只基于一个模型即可确定出各属性信息,确定的属性信息的准确性较低而言,本技术可以基于至少两个子模型确定出各属性信息,可以提高确定的属性信息的准确性。另外,相较于一个子模型只确定一种类型的属性信息,需要的子模型的数量较多,影响效率而言,本技术至少一个子模型的输出结果中包含至少两种类型的属性信息,即至少一个子模型可以确定多种类型的属性信息,从而可以减少子模型的数量,提高效率。另外,针对输出结果中包含属性信息类型为语义类别的子模型,相较于可以基于该子模型确定三种及三种以上类型的属性信息,使得确定的属性信息的准确性较低而言,本技术该子模型的输出结果中包含的属性信息的类型总数不大于两种,即只基于该子模型确定一种或者两种类型的属性信息,该子模型确定的属性信息的类型较少,可以提高确定的属性信息的准确性。基于此,本技术可以实现既快捷又准确的确定目标物体的各属性信息的目的。
- 还没有人留言评论。精彩留言会获得点赞!