一种基于转换联动的环境感知方法、系统、装置以及介质与流程
本发明涉及一种基于转换联动的环境感知方法、系统、装置以及介质,属于环境感知。
背景技术:
1、环境感知是指一种精密的人工智能技术,可以模拟自然环境中物体的行为和空间移动,从而有效地理解和解决实际制定的任务。它的基础原理涉及各种传感,处理从传感器收集的数据的机器视觉算法,以及关于实现复杂智能环境下的决策论。在当今许多实际场景中,环境感知已经成为了智能家居、工业管理、智能城市、自动驾驶等领域的应用基础,它能够提高各机器人、机械系统和智能系统在实际场景应用中的能力,从复杂混乱的环境中提取有用的信息并满足不同的用户需求,从而为人们的日常生活带来更加便捷的体验。
2、但是,实现环境感知的常用方法是基于单一数据源绑定固定算法进行分析处理,从环境中提取有用信息的效果欠佳,并具有如下技术缺陷:
3、1、数据源的类型通常只支持视频,不支持多个数据源的使用场景。
4、2、算法的使用相对单一,不支持附件进行辅助分析,而且算法完成数据分析后,通常直接输出结果,缺少数据转换和过滤,从而造成使用不够灵活。
5、3、通常不具备或只支持简单的联动,只能传递一个执行指令,无法对联动的任务进行内部参数的修改。
6、4、稍复杂的环境感知,基本采用单独开发的方式实现,不具备复用性和扩展性,缺少一种灵活配置的方式来实现复杂使用场景的环境感知。
7、因此,本发明亟待提出了一种环境感知实现方法,基于转换联动来解决目前遇到的技术瓶颈。
技术实现思路
1、为了解决上述现存的技术问题,本发明的目的在于通过转换联动实现环境感知,提供一种基于转换联动的环境感知方法、系统、装置以及介质,以达到低成本、高效率、准确地识别出感知对象,收集到更加可靠的感知数据,从而保证所形成的服务的可靠性的技术目的。
2、为实现上述目的,本发明提供一种基于转换联动的环境感知方法,包括如下步骤:
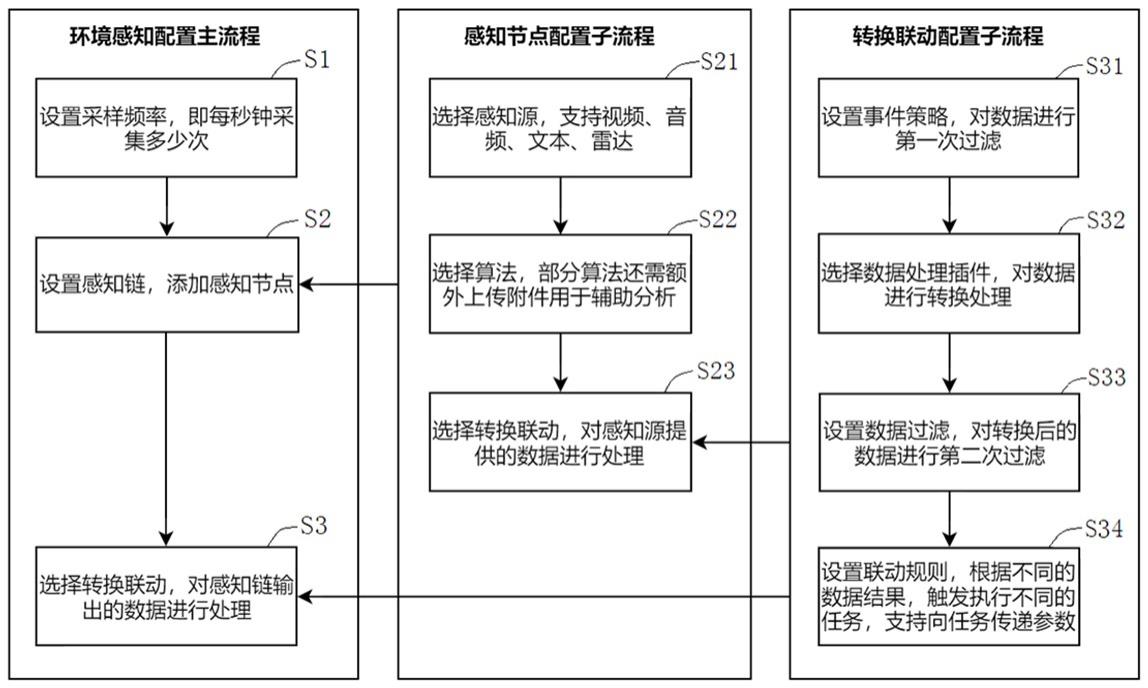
3、s1、根据使用场景和主机性能的综合评估结果,设置采样频率,并对所有感知源同步生效;
4、s2、设置感知链路,添加感知节点,并将所有感知节点的数据按照感知链路传递后输出;
5、s3、选择感知链路的转换联动,并对感知链路输出的数据进行处理。
6、所述步骤s2中的感知节点采用如下配置步骤:
7、s21、选择感知源,并按照采样频率,从感知源中抽取感知节点的数据;
8、s22、选择算法,根据需要上传附件用于辅助分析,并基于算法与附件对感知节点的数据进行分析识别;
9、s23、选择算法的转换联动,并对分析识别的结果进行处理。
10、所述步骤s3和s23中的转换联动采用如下配置步骤:
11、s31、设置事件策略,按照事件策略的类型,对输入数据进行第一次过滤;
12、s32、选择数据处理插件,按照处理插件的转换规则,对第一次过滤后的数据进行转换;
13、s33、设置数据过滤,基于与或逻辑判定,对转换后的数据进行第二次过滤;
14、s34、设置联动规则,对第二次过滤后的数据进行判定,并根据判定结果触发执行相应的任务,且支持向相应的任务传递参数。
15、本发明方法进一步的,所述步骤s2中感知链路中的多个感知节点之间有并行和串行关系时,上层感知节点的数据打包合并后传递到下层感知节点,并通过末端感知节点完成最后的数据输出。
16、本发明方法进一步的,所述步骤s21中的感知源的类型为视频、音频、文本或雷达,且不同的感知源类型对应不同的算法类型。
17、本发明方法进一步的,所述步骤s21中,当采样频率低于或等于1帧/秒时,通过感知节点的接口直接抽帧;
18、当采样频率高于1帧/秒时,采用硬或软解码抽帧,并采用gpu或cpu提高抽帧效率;
19、当多个感知节点中存在相同的感知源时,只进行一路抽帧;
20、当多个环境感知配置不同的采样频率时,按照最高采样频率抽帧,且在给其他采样频率的环境感知返回数据时丢弃多余帧。
21、本发明方法进一步的,所述步骤s31中的事件策略的类型为结果变化、持续时间或重复次数;
22、当按照结果变化对输入数据进行第一次过滤时,若本次数据和上次数据不同则上报一次,否则过滤不报;
23、当按照持续时间对输入数据进行第一次过滤时,若规定时间内的数据相同则上报一次,否则过滤不报;
24、当按照重复次数对输入数据进行第一次过滤时,若规定次数内的数据相同则上报一次,否则过滤不报。
25、本发明方法进一步的,所述步骤s32中的处理插件采用python格式,基于固定模板填写转换规则,并按照转换规则对第一次过滤后的数据进行转换。
26、本发明方法进一步的,所述步骤s33中的与或逻辑判定采用lambda表达式。
27、本发明方法进一步的,所述步骤s34中的联动规则采用lambda表达式,并能够触发执行一个任务;每一条联动规则能够设置一条传参规则,传参规则采用lambda表达式,并能够向触发执行的任务传递参数。
28、本发明又提供一种基于转换联动的环境感知实现系统,包括环境感知模块、感知节点模块、转换联动模块。
29、所述的环境感知模块包括设置采样频率单元、设置感知链路单元、选择感知链路转换联动单元;其中,
30、设置采样频率单元,用于根据使用场景和主机性能的综合评估结果,设置采样频率,并对所有感知源同步生效;
31、设置感知链路单元,用于设置感知链路,添加感知节点,将所有感知节点的数据按照感知链路传递后输出;
32、选择感知链路转换联动单元,用于选择感知链路的转换联动,并对感知链路输出的数据进行处理。
33、所述的感知节点模块,用于感知链路单元中感知节点的配置,包括选择感知源单元、选择算法单元、选择算法转换联动单元;其中,
34、选择感知源单元,用于选择感知源,并按照采样频率,从感知源中抽取感知节点的数据;
35、选择算法单元,用于选择算法,根据需要上传附件用于辅助分析,并基于算法与附件对感知节点的数据进行分析识别;
36、选择算法转换联动单元,用于选择算法的转换联动,对分析识别的结果进行处理。
37、所述的转换联动模块,用于选择感知链路转换联动单元和选择算法转换联动单元中转换联动的配置,包括设置事件策略单元、选择数据处理插件单元、设置数据过滤单元、设置联动规则单元;其中,
38、设置事件策略单元,用于设置事件策略,按照事件策略的类型,对输入数据进行第一次过滤;
39、选择数据处理插件单元,用于选择数据处理插件,按照处理插件的转换规则,对第一次过滤后的数据进行转换;
40、设置数据过滤单元,用于设置数据过滤,基于与或逻辑判定,对转换后的数据进行第二次过滤;
41、设置联动规则单元,用于设置联动规则,对第二次过滤后的数据进行判定,并根据判定结果触发执行相应的任务,且支持向相应的任务传递参数。
42、本发明还提供一种基于转换联动的环境感知实现装置,包括存储器,图形处理器,处理器,以及存储在存储器上并可在处理器上运行的计算机程序;
43、所述的图形处理器辅助所述的基于转换联动的环境感知方法中的算法进行分析识别;
44、所述的处理器执行所述的计算机程序时实现所述的基于转换联动的环境感知方法。
45、本发明另提供一种计算机可读存储介质,所述计算机可读存储介质上存储有执行所述的基于转换联动的环境感知方法的计算机程序。
46、综上,相比现有技术,本发明能够低成本、高效率、准确地识别出感知对象,从复杂混乱的环境中收集到更加可靠的感知数据,并满足不同的用户需求,保证所形成的服务的可靠性,灵活又便捷,并具有如下技术优势:
47、1、感知源支持视频、音频、文本、雷达,并支持多个数据源的使用场景。
48、2、不同的感知源类型对应不同的算法类型,算法支持上传辅助分析用的附件,且在算法完成数据分析后,通过转换联动对数据进行转换和过滤再输出,使用更加灵活。
49、3、数据处理采用插件,基于固定模板填写转换规则,并按照规则将输入数据转换成新数据。
50、4、联动规则根据不同的数据结果,触发执行不同的任务,并支持向相应的任务传递参数。
51、5、通过灵活配置的方式来实现复杂使用场景的环境感知,具备复用性和扩展性。
- 还没有人留言评论。精彩留言会获得点赞!