多站无源时差交叉联合定位系统的优化布站方法及装置与流程
本发明涉及多站无源定位,具体涉及一种多站无源时差交叉联合定位系统的优化布站方法及装置。
背景技术:
1、在现代高技术战争中,电子战已经发展成一种独立的战争方式,而无源定位技术作为电子战中十分重要的侦查手段,具有隐秘性强、作战距离远、定位方法多等优势。
2、常见的无源定位方法有许多种,如测向交叉(angle of arrival,aoa)定位、时差(time difference of arrival,tdoa)定位、时差-交叉(time difference of arrival-angle of arrival,tdoa-aoa)联合定位等等。测向交叉定位体制依赖于测角的精度,其定位精度会因目标到观测站距离的增加而迅速恶化,而时差定位最少需要三个以上观测站才能实现对目标的定位。在无源定位系统中,影响定位精度的主要因素有测量误差、站址误差以及布站方式等。在测量误差与站址误差一定的情况下,合理的布站方式能够有效提高对目标的定位精度。
3、目前,国内外学者对无源定位系统的定位及优化布站研究成果,主要集中于测向交叉定位以及时差定位两种定位体制。此外,由于群智能算法具有自学习性、自适应性、自组织性等智能特征,因此广泛运用于迭代寻优、数据聚类等问题中。汪波在其发表的论文“基于遗传算法的tdoa-aoa定位系统的最优布站算法”中,利用遗传算法对定位模型进行求解,当目标区域的定位误差的克拉美罗下界平均值最小时,对应的布站结果即为所求解的最优布站方式。对于遗传算法,首先需要对待求解问题进行编码,找到最优解后再对问题解码,因此编程实现比较复杂;另外,其在寻优过程中存在收敛速度慢、局部搜索能力差等缺点。
技术实现思路
1、技术目的:为提高对指定目标区域的定位精度,解决现有最优布站优化算法中收敛速度慢、局部搜索能力差等问题,本发明提出一种多站无源时差交叉联合定位系统的优化布站方法及装置,通过建立时差交叉联合定位模型,综合了测向交叉定位和时差定位两种体制的优势,运用粒子群优化算法求解时差交叉联合定位模型的最优解,具有收敛速度快、定位精度高,兼顾局部搜索能力和全局搜索能力等优点,能够减少运算时间,提高对目标区域的定位精度,获得指定目标区域定位的优化布站位置。
2、技术方案:为实现上述技术目的,本发明采用了如下技术方案:
3、一种多站无源时差交叉联合定位系统的优化布站方法,其特征在于,包括:
4、步骤1、建立无源时差交叉联合定位系统的最优布站模型:
5、步骤1.1、定义观测站的坐标位置为最优布站模型中的自变量;
6、步骤1.2、根据目标区域和观测站布站区域,建立自变量的约束条件;
7、步骤1.3、建立衡量目标区域整体的定位精度的适应度函数;
8、s2、运用粒子群算法求解所述最优布站模型的最优解:
9、s2.1、所述无源时差交叉联合定位系统中的观测站的个数为每个粒子的维度数,初始化粒子种群参数,包括粒子种群规模、粒子的初始位置、粒子的初始速度、粒子搜索空间维数和迭代次数;
10、s2.2、根据粒子的初始位置和初始速度,利用适应度函数评价各个粒子的当前适应度值;
11、s2.3、将粒子的初始位置赋值给个体最优解即个体最优位置,将所有粒子的当前适应度值进行比较,找出最小适应度值并赋值给群体最优解,即群体最优位置;
12、s2.4、更新粒子群速度和位置,同时确保粒子群不超出观测站布站区域;
13、s2.5、利用适应度函数评价步骤s2.4计算更新后的粒子适应度值,与前一次迭代结果进行比较,并更新粒子的个体最优解和群体最优解;
14、s2.6、判断是否达到预设的迭代次数,若是,则停止迭代,输出当前的迭代结果,即为最优布站结果,若不满足则返回步骤s2.4。
15、作为优选,所述步骤s1.2中,所述约束条件表示为式(1)
16、 (1)
17、其中,表示表示观测站位置,辐射源目标位置,表示观测站布站范围,表示目标区域;
18、步骤s1.3中,将所述无源时差交叉联合定位系统中的目标区域gdop的平均值作为适应度函数,表示为式(2):
19、 (2)
20、 为目标区域中,为目标区域中各个点的gdop值。
21、作为优选,所述无源时差交叉联合定位系统中的目标区域中各个点的gdop通过式(19)确定:
22、(19)
23、其中,为定位误差的协方差矩阵,通过式(18)确定:
24、(18)
25、其中, 为定位误差,通过式(17)确定:
26、(17)
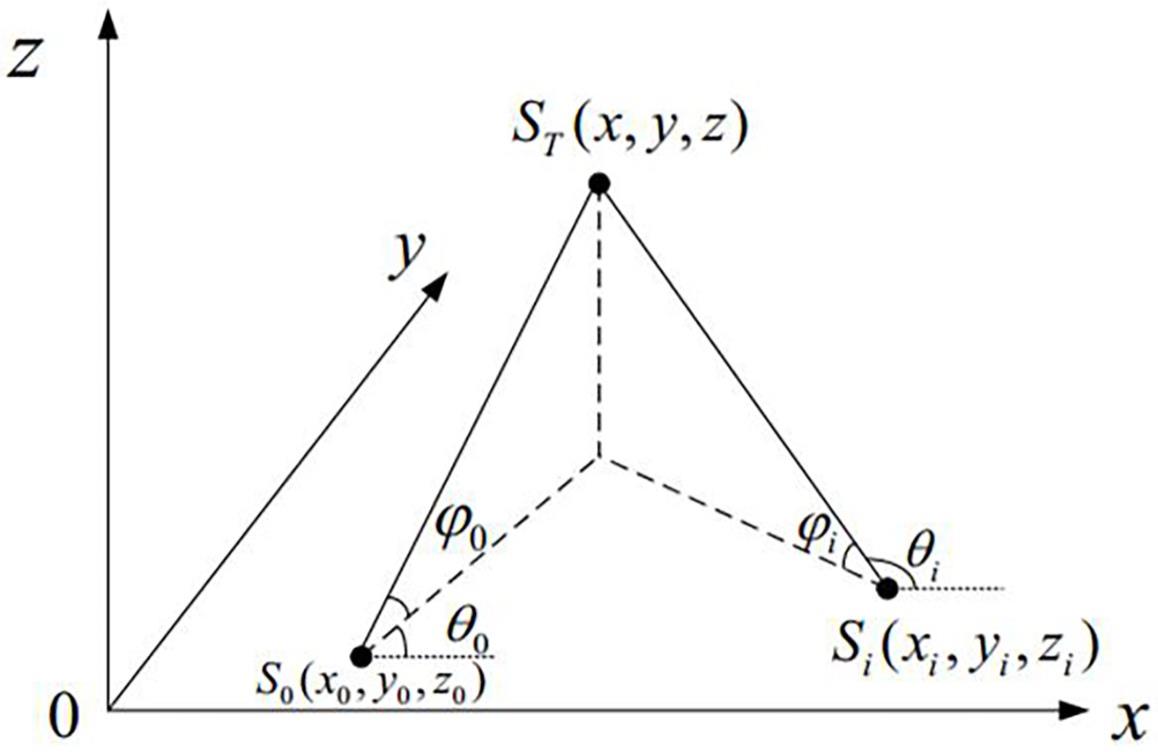
27、其中,表示测量误差, 表示站址误差,为系数矩阵,测量误差 中包括从各观测站测得辐射源目标的方位角和俯仰角的测角误差,以及辐射源目标到各观测站与到各个辅站之间的距离差误差,距离差通过计算辐射源目标到各观测站与到各个辅站之间的时间差和电磁波传播速度的乘积获得。
28、作为优选,其特征在于,所述步骤s2.1中,假设种群中粒子的个数为 ,目标所在的搜索空间维度为 ,则空间中第个粒子的位置表示为维向量, ,即式(20):
29、(20)
30、空间中第 个粒子的速度表示为式(22):
31、(22)
32、步骤2.3中,第 个粒子在当前时刻搜索到个体最优位置为 ,则整个粒子群在当前时刻搜索到的群体最优位置表示为式(23):
33、(23)
34、上标 表示第 次迭代;
35、步骤2.4中,根据式(24)更新粒子群位置和速度:
36、(24)
37、式中,表示第 个粒子;上标 表示第 次迭代; 为惯性权重; 为自我学习因子,为种群学习因子;与为0~1的随机数。
38、一种多站无源时差交叉联合定位系统的优化布站装置,其特征在于,包括:
39、最优布站模型建模块,用于建立无源时差交叉联合定位系统的最优布站模型;
40、粒子群算法计算模块,用于运用粒子群算法求解所述最优布站模型的最优解;
41、其中,最优布站模型建模块包括:
42、定义模块,用于定义观测站的坐标位置为最优布站模型中的自变量;
43、约束条件建立模块,用于根据目标区域和观测站布站区域,建立自变量的约束条件;
44、适应度函数建立模块,用于建立衡量目标区域整体的定位精度的适应度函数;
45、所述粒子群算法计算模块包括:
46、初始化模块,用于将所述无源时差交叉联合定位系统中的观测站的个数为每个粒子的维度数,初始化粒子种群参数,包括粒子种群规模、粒子的初始位置、粒子的初始速度、粒子搜索空间维数和迭代次数;
47、当前适应度计算模块,用于根据粒子的初始位置和初始速度,利用适应度函数 计算各个粒子的当前适应度值;
48、当前最优解求解模块,将粒子的初始位置赋值给个体最优解即个体最优位置 ,将所有粒子的当前适应度值进行比较,找出最小适应度值并赋值给群体最优解,即群体最优位置 ;
49、粒子群速度和位置更新模块,用于更新粒子群速度和位置,同时确保粒子群不超出观测站布站区域;
50、迭代计算模块,用于利用适应度函数 评价更新后的粒子适应度值,与前一次迭代结果进行比较,并更新粒子的个体最优解和群体最优解;
51、输出模块,用于判断是否达到预设的迭代次数,若是,则停止迭代,输出当前的迭代结果,即为最优布站结果,若不满足则反馈给粒子群速度和位置更新模块。
52、一种计算机可读储存介质,其特征在于,所述计算机可读储存介质上存储有计算机程序,所述计算机程序被处理器执行时实现所述方法。
53、有益效果:由于采用了上述技术方案,本发明具有如下有益效果:
54、(1)本发明将多站无源时差-交叉联合定位优化布站问题转化为求解最优解问题,通过求解适应度函数的最小值,从而得到该最小值所对应的最优布站位置坐标。与传统布站方式相比,本发明所提方法能够快速得到多站最优布站位置,提高目标的定位精度;
55、(2)本发明运用粒子群算法求解最优布站模型。粒子群算法中每个粒子都有其位置和速度,在求解最优化问题时更容易找到全局最优解,而不会被困在局部最优。与遗传算法相比,粒子群算法具有收敛速度快、需调节的参数少,编码简单等优势。
- 还没有人留言评论。精彩留言会获得点赞!