考虑负效应的城市垃圾双层多目标选址-路径优化方法
本发明属于工程管理,特别涉及到一种考虑负效应的城市垃圾管理双层多目标选址-路径优化方法。
背景技术:
1、城市人口每年以3-5%的速度增长,到2050年将有三分之二的人口生活在城市中,因此城市中的垃圾预计每十年就会增加一倍,这对政府来说是很大的财政负担。许多城市正在评估城市垃圾管理和垃圾收集的成本效益和环境影响。其中,及时收集垃圾是一项重要任务,垃圾回收中心的规模和位置也会显著影响垃圾收集效率。现在基于垃圾管理的选址-路径问题(lrp)实际上是将垃圾收集路径规划问题与垃圾回收中心选址问题结合起来。此外,垃圾回收中心的规模和车辆的能力是有限的,因此要考虑容量限制的选址-路径问题(clrp)。
2、在政府的规定和非政府组织的压力下,为了避免垃圾回收中心对附近居民的负面影响,这些带有负效应的垃圾回收中心必须远离居民区,而经济成本如垃圾回收中心的建设、运营和垃圾收集成本也要考虑其中,因此这是一个多目标优化问题,目的是使负效应和成本最小化,这是从政府角度考虑的。为了更好地平衡负效应和经济成本,政府还需要考虑环卫公司的垃圾收集计划。根据垃圾回收中心的规模和位置,环卫公司要优化配送路径使成本最小化,这又影响了政府的决定。因而,这是一个双层规划。
3、考虑仓库和路线容量限制的clrp由watson-gandy和dohrn于1973年首先提出,现已有许多实际应用,如垃圾收集(rossit等,2020)和分布式塑料回收(santander等,2020)。单目标lrp的一般数学模型以总成本最小化作为目标函数,包括设施成本和运输成本。近几十年来,人们研究了环境问题,特别是影响或危害人类健康的因素。liu和liao(2021)考虑了双目标——经济成本和碳排放,以解决垃圾收集路径问题。半厌恶性设施通常指的是有用但不受欢迎的、造成环境问题的设施,需要远离人口密集的地区,其运营成本与距离呈正相关。这种相互矛盾吸引了学者来研究如何平衡经济目标和令人讨厌的影响。双层规划针对层次优化问题,这意味着原始约束可能是解决另一个问题的变量。
4、然而,现今有关城市垃圾管理选址-路径问题的研究存在以下问题:(1)很少有研究将设施的负效应作为模型的目标函数或者考虑半厌恶设施相关的问题,或者简单地把负效应函数与距离和人口数量联系起来,结合现实情况把当地环境归为影响因素的研究较少;(2)目前把政府和公司同时作为决策主体的研究不多,并且很少分析两者之间的目标关系,同时考虑负效应和垃圾回收成本的多目标模型较少,经常忽略这是一个城市垃圾管理联合决策的双层多目标优化问题;(3)目前多数应用智能算法的研究虽然已经结合多种算法的优势,但是初始化方式比较单一,初始解的生成有待改进。
技术实现思路
1、本发明针对城市垃圾管理中的考虑负效应的选址路径问题,提出了一种考虑负效应的城市垃圾管理双层多目标选址-路径优化方法。
2、本发明解决所述技术问题采用的技术方案是:
3、一种考虑负效应的城市垃圾双层多目标选址-路径优化方法,该优化方法包括以下内容:
4、设置上层决策模型和下层决策模型,有两个决策小组,即政府和环卫公司,政府和环卫公司之间关系密切、相互联系、相互制约;
5、设施是处理或暂时储存城市垃圾的场所,在运作过程中会对周围环境产生负效应,负效应指设施的运行对人类健康、生命或生存造成的损害;根据风向之间的夹角和两点之间的直线之间的距离调整负效应影响距离,充分考虑所选半厌恶性设施位置的气候;将垃圾回收中心定义为rl=(x1,l,x2,l),垃圾产生点为ai=(x1,i,x2,i),dil为垃圾回收中心与垃圾产生点之间的欧氏距离,θil为直线两点间直线与当前风向之间的夹角,ωil(dil)为与距离相关的负效应;
6、当θil在0到90度之间增长,风速在两点间直线方向分量减小,其他参数保持不变时,负效应也随之减少,在这种情况下,ωil(dil)=ml-mldil/cosθil,其中m表示回收中心处理的垃圾量达到容量时的负效应值,m是与距离相关的系数;
7、当设施与居民区的距离小于第一距离阈值时,它对负效应值的影响很小,即ωil(dil)=ml,同样,当设施远离居民区时,距离的小幅减少并不会增加负效应,即当设施与居民区的距离大于第二距离阈值时,负效应为0,即ωil(dil)=0;
8、则与距离相关的负效应ωil(dil)的函数为:
9、
10、在一定范围内,负效应ωil(dil)与距离dil呈负相关关系,如果距离超过了限制,则认为设施的负效应忽略不计;
11、其中,l为第l个垃圾回收中心,dl,1,dl,2:垃圾回收中心l负效应的第一距离阈值和第二距离阈值;
12、所述上层决策模型:在上层决策模型中将需要考虑的多种类型的成本分为与垃圾回收中心的负效应有关的两种和与之无关的两种,上层决策模型为公式(1)-(5):
13、
14、
15、∑l∈rxl≥1 (3)
16、
17、
18、上层决策模型中,f1为与负效应有关的成本,f2为与负效应无关的成本,目标函数(1)最小化回收中心负效应;目标函数(2)最小化总经济成本,包括回收中心开设成本处理成本车辆旅行成本∑u∈n∑v∈n∑k∈vhuvyuvk和车辆固定成本约束(3)确保了垃圾回收中心至少有一个;约束(4)为回收中心容量的限制,约束(5)表示0-1变量约束;
19、下层决策模型:环卫公司的目标是尽量减少与车辆相关的成本,下层决策模型为公式(6)-(20):
20、
21、
22、
23、
24、
25、
26、
27、
28、
29、
30、
31、
32、∑l∈r∑m∈r∑k∈vylmk=0 (18)
33、
34、
35、
36、
37、目标函数(6)包括车辆行驶成本∑u∈n∑v∈n∑k∈vhuvyuvk和固定成本约束条件(7)和(8)被称为度约束,约束条件(9)将每个垃圾产生点只指定给一个垃圾回收中心;约束(10)至(12)禁止非法路线;约束(13)保证在车辆为其第一个垃圾产生点提供服务之前,负载为0;约束(14)意味着送回垃圾回收中心的垃圾量等于分配给垃圾回收中心的所有点所产生的垃圾量;约束条件(15)意味着任何路线上的总负载不超过车辆容量;约束条件(16)是运量保护约束;约束条件(17)确保发放的车辆数量不超过最大的回收中心的数量;约束条件(18)确保任何车辆都不能在回收中心之间行驶;约束条件(19)和(20)保证了在垃圾产生点产生的垃圾量和路径(u,v)中的车辆负载是非负值;约束条件(21)和(22)是对决策变量的二元约束;
38、上述中符号表示含义:
39、r:垃圾回收中心候选点集合;
40、p:垃圾产生点集合;
41、n:物流网络中所有节点集合,n=r∪p;
42、a:物流网络中的路径集合,a={(u,v):u,v∈n,u≠v};
43、v:物流网络中的车辆集合,k∈v;
44、l/m:垃圾回收中心的索引;
45、i/j:垃圾产生点的索引;
46、u/v:物流网络中节点的索引;
47、kl:垃圾回收中心l的最大车辆数,l∈r;
48、qi:垃圾产生点i每天产生的垃圾量,i∈p;
49、pi:垃圾产生点i周围居民的数量,i∈p;
50、ql:垃圾回收中心l的容量,l∈r;
51、ll:垃圾回收中心l的当前处理容量,l∈r;
52、ck:物流网络所用的同质车辆k的容量,k∈v;
53、车辆k在路径(u,v)上的载重,k∈v,(u,v)∈a;
54、垃圾回收中心l的建设成本,l∈r;
55、使用车辆k的固定成本,k∈v;
56、huv:节点u和v之间的运输成本,u,v∈n;
57、al:垃圾回收中心l的单位垃圾处理成本,l∈r;
58、rl:垃圾回收中心l的坐标rl=(x1,l,x2,l),l∈r;
59、ai:垃圾产生点i的坐标,ai=(x1,i,x2,i),i∈p;
60、xl:0-1变量,如果在节点l建立垃圾回收中心,则xl=1,反之,xl=0;
61、yuvk:0-1变量,如果车辆k从节点u到节点v,则yuvk=1,反之,yuvk=0;
62、zil:0-1变量,如果垃圾产生点i被分配到垃圾回收中心l,则zil=1,反之,zil=0;
63、综合联立上层决策模型以及下层决策模型,上层决策模型具有最高优先级,得到考虑负效应的城市垃圾管理多目标选址-路径模型。
64、所述考虑负效应的城市垃圾管理多目标选址-路径模型的求解过程是:
65、在初始化阶段采用聚类方法将垃圾产生点分配给上层的垃圾回收中心,在下层同时采用随机和cw节约算法生成初始车辆路线;
66、将两个决策者考虑的问题拆解开来,上层为垃圾回收中心的选址问题,下层为单个垃圾回收中心的vrp;上下层均选用遗传算法求解,但针对两个问题分别选用不同的编码方式和初始化方式,算子也根据染色体特点灵活设计;
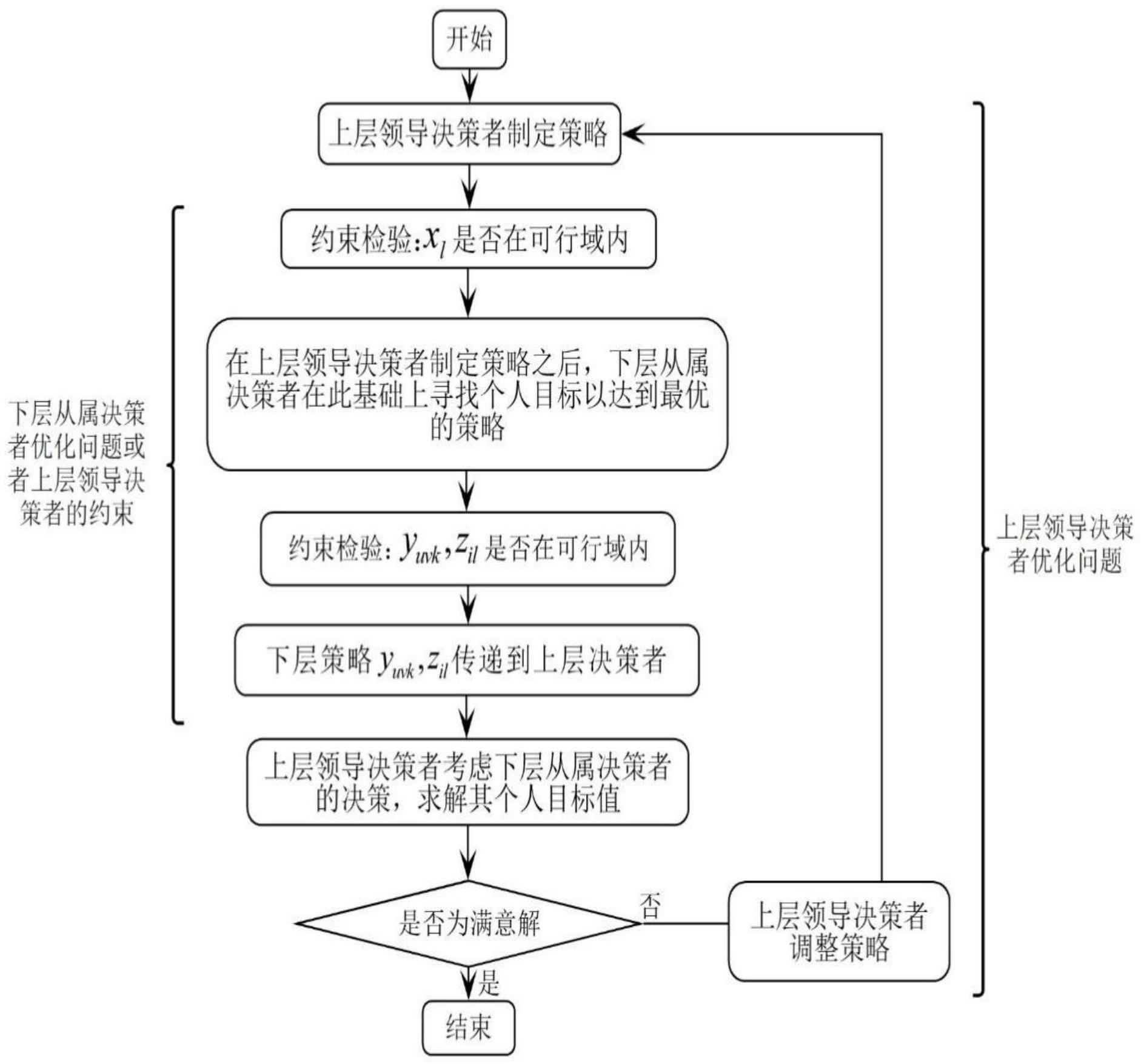
67、1)双层规划求解思路:上层领导决策者与下层从属决策者共同完成选址-路径决策,政府雇佣环卫公司进行垃圾回收,政府完成选址决策,环卫公司完成路径规划决策;两者的冲突在于:政府追求目标为负效应值越小越好,这与总体经济目标最小化冲突;而环卫公司追求的经济目标是上层的一部分,它既能影响上层目标值又被上层决策左右;xl是上层领导决策模型的决策变量,决定垃圾回收中心建设与否,控制下层路径起点;yuvk和zil是下层从属决策模型的决策变量,关系到运输路线的规划,反作用于上层选址决策的经济成本;
68、2)编码与解码:考虑负效应的城市垃圾管理多目标选址-路径模型的解由两条长度可变的染色体组成,第一条对应于下层决策,第二条则对应于上层决策,两条染色体分别采用不同的编码与解码方式;
69、第一条染色体编码:第一条染色体上的阳性基因代表垃圾产生点,用正整数表示;阴性基因代表车辆编号,用负整数描述;垃圾产生点和车辆的基因依次用不同的数字按顺序编号,编码时要求两个车辆不相邻,且已知垃圾产生点的总数和车辆总数进行随机编码;
70、第一条染色体解码:每辆车的容量相同,已知车辆容量,只要不违反车辆容量,垃圾产生点就会被分配到它左边且最近的车辆;如果车辆容量不足以为分配给它的垃圾产生节点提供服务,则在第一条染色体中在没有能力提供服务的垃圾产生节点前面插入一个新的车辆,所插入的新车按照已有车辆顺序编号;
71、第二条染色体编码-解码:第二条染色体上的基因表示车辆被分配到的垃圾回收中心,其长度由第一条染色体中的车辆数量决定,第二条染色体上每个基因上的数字为所述车辆被分配到的垃圾回收中心的序列号;所述垃圾回收中心按照顺序编制序列号;
72、以上层目标函数为基础设置适应度函数,计算上层染色体的适应度值,判断个体的优劣;对个体利用快速非支配排序和拥挤距离计算机制更新帕累托存档;通过非支配排序将每组解决方案排列到不同的前沿,拥挤距离计算机制则用于确保非支配解的分布尽可能均匀;每当存档满进行删除操作时,再次进行快速非支配排序,计算拥挤距离从而保留优秀个体;在进行遗传操作时,使用轮盘赌方式选择优质染色体,单点交叉和最优成本路径交叉算子分别应用于上层染色体和下层染色体,以提高被选择个体质量,反转变异生成子代染色体,并使用精英保留策略以免丢失优秀个体;若满足终止条件,则输出帕累托最优解集,否则进行下一次迭代。
73、采用聚类方法将垃圾产生点分配给上层的垃圾回收中心的过程是:
74、s1:计算所需的垃圾回收中心的最少数量num,num=∑i∈pqi/q+1
75、s2:从集合r中随机选择num个垃圾回收中心作为聚类中心,将num个垃圾回收中心的序号对应于聚类中心集合rcluster中的元素;
76、s3:计算每个垃圾产生点到rchuster中每个聚类中心的距离,垃圾产生点和聚类中心分别用i=(xi,yi)和o=(xo,yo)表示,用欧氏距离来计算垃圾产生点到聚类中心的距离dis(i,o),公式如下:
77、
78、s4:根据最近距离原则将垃圾产生点分配到聚类中心,即计算每个垃圾产生点到所有聚类中心的距离,选择距离最小值对应的聚类中心为当前垃圾产生点需要分配的聚类中心;
79、s5:根据集合rcluster中元素的优先级更新顺序:首先,计算分配给每个聚类中心的垃圾产生点数量,数量越多,聚类中心的优先级就越高;然后,将集合rcluster中的元素按优先级降序排列;
80、s6:按照最近距离的原则,优先选择垃圾回收中心为垃圾产生点服务,同时需要满足容量约束;如果满足垃圾回收中心的容量限制,则根据最近距离原则依次对所有未分配的垃圾产生点提供服务;如果容量无法满足,则选择下一优先级的垃圾回收中心去服务未分配的垃圾产生点。
81、所述在下层同时采用随机和cw节约算法生成初始车辆路线的过程是:
82、80%的初始种群是随机生成的,另外20%由cw生成;cw节约里程算法包括以下步骤:
83、s1:计算每个垃圾产生点与其他垃圾产生点和垃圾回收中心之间的距离;
84、s2:使用以下公式计算节约距离,ei,k=dli+dlj-dij,其中d表示两个节点之间的距离;
85、s3:将节约距离值ei,j按降序排序,然后写入列表list;
86、s4:按照列表顺序,检查连接节点i、节点j的可行性;若可行,则连接i和j;否则,检查下一个集合,直到所有节点都安排好;
87、所述可行性包括是否违反车辆容量限制。
88、以上层目标函数为基础设置适应度函数的过程是:
89、先判断每条染色体是否满足车辆和垃圾回收中心的容量限制,如果满足容量限制,则适应度函数为:
90、
91、
92、如果不满足车辆和垃圾回收中心的容量约束,则采用带有惩罚因子的适应度函数:
93、
94、
95、其中,p1、p2、p3是足够大的惩罚因子,分别对应于负效应、车辆容量和垃圾回收中心容量;ff1、ff2、ff3、ff4代表遗传算法中的适应度函数。
96、所述政府和环卫公司之间关系密切、相互联系、相互制约具体是:(1)上层领导决策者和下层从属决策者站在不同的立场做决策,从宏观角度来看,除了经济目标外,领导决策者还需要考虑社会影响,而从属决策者只关心自己的效益或成本;
97、(2)除了成本最小化外,政府也在寻求将负效应降到最低,就经济目标而言,政府考虑的是设施和运输的成本,而环卫公司则只关心运输的成本;
98、(3)从属决策者是在领导决策者决定之后和考虑之下执行领导决策者的决定的,政府决定回收中心的规模和位置,这影响到环卫公司的收集路线规划,政府做出选址决策后,环卫公司确定最佳收集路线以确保成本最小化,这反过来又影响影响政府的经济目标的实现;
99、(4)在分层或双级的clpr中存在着互动的决策单元,虽然政府和环卫公司都试图独立地最小化自己的目标,但他们都受到对方的影响,这反映在目标函数和约束条件中。
100、与现有技术相比,本发明的有益效果是:
101、本发明提出了一个具有两个决策者的双层多目标clrp问题。在双层结构中,政府即上层领导决策者,以经济成本和负效应最小化为目标来决定建设哪些垃圾回收中心;环卫公司即下层从属决策者,以车辆相关成本最小化为目标,并根据政府的选址决策做出最优路线决策。负效应函数也具有创新性,其分段函数的设计考虑了候选设施点的气候,因而更适合于实际问题。
102、此外,本发明提出了一种改进的混合nsga-ii来解决这一np难问题。该解由两条染色体组成,一条代表上层选址决策,另一条代表下层路线方案。在初始化阶段,采用聚类方法将垃圾产生点分配给上层的垃圾回收中心,同时采用随机和cw节约算法生成下层的初始车辆路线。第一条染色体由单点交叉算子进行更新,第二条染色体使用改进的最优成本路径交叉算子进行更新。为了保证个体的质量,基于每个个体的适应度值,采用自适应交叉率。改进的算法大大提高了问题的求解效率。
103、本发明具有很好的应用前景,一是有利于促进双层城市物流网络的推广应用,通过优化城市垃圾管理以减轻负效应,带来一定的社会效益;二是有利于帮助改善环卫公司的管理,降低企业的运营成本,实现区域内生活生产垃圾的高效运转处理,创造良好的经济效益。
- 还没有人留言评论。精彩留言会获得点赞!