一种测试热成像温度数据恢复为灰度图像的方法与流程
本发明属于图像处理领域,涉及一种测试热成像温度数据恢复为灰度图像的方法。
背景技术:
1、热成像系统更适合克服光照强度变化、背景变化等问题,但是由于当前多数的热成像摄像头视频成像存在动态调整问题,即当热源靠近摄像头时,图像中的每个像素点灰度值会发生明显的变化,严重影响热成像目标检测的效果。所以采用非动态的热成像数据进行目标检测至关重要。
2、目前,基于热成像目标检测的方法有基于深度学习模型的目标检测和传统算法下的目标检测,但是均为提及到热成像白平衡问题。
3、目前针对热成像目标检测的相关工作中,国内外专家已经提出了大量的算法,yadav在文献moving object detection in real-time visual surveillance usingbackground sub-traction technique[j]. in 2014 14th international conferenceon hybrid intelligent systems, 2014, no 1, pp 79–84.引入了形态学算子的后处理方法,改进了gmm检测效果。sharma等人在文献fisher’s linear discriminant ratiobased threshold for moving human detection in thermal video[j]. infrared phystechnol , 2016, 78:118–128.提出了一种基于fld的方法,用于彩色和热视频帧检测运动对象,但当背景场景中存在多种行为时该方法会产生问题。
4、张学思等人在文献基于轻量型卷积神经网络的海面红外显著性目标检测方法[j]. 山东大学学报(工学版),2022,52(2): 41-49中将红外图像与轻量型卷积神经网络进行结合,可以在大幅减少参数量的情况下有效提升红外显著性的目标检测性能。
5、代牮等人在基于改进yolov5 的复杂背景红外弱小目标检测算法[j].红外技术.通过在yolov5的方法的基础上,添加注意力机制提高算法的特征提取能力和检测准确率。
技术实现思路
1、有鉴于此,本技术提供了一种测试热成像温度数据恢复为灰度图像的方法;具体方案如下:
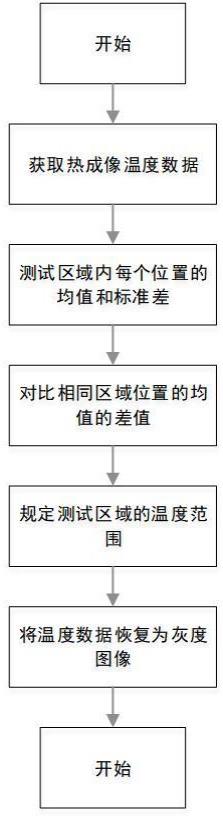
2、一种测试热成像温度数据恢复为灰度图像的方法,包括以下步骤:
3、步骤1,获取测试区域基础图像的原始温度数据集合,并记录原始温度数据集合中每一原始温度数据在热成像中的位置数据;
4、步骤2,在原始温度数据集合中任意提取m组背景数据以及对应的位置数据,其中m≥1且m为整数,获取测试区域中每一背景数据在第一时刻的第一均值和第一标准差;
5、步骤3,获取测试区域中每一背景数据在设定周期内第二时刻的第二均值和第二标准差;
6、步骤4,获取在第二时刻和第一时刻之间、第二均值和第一均值之间的第一变化,以及第二标准差和第一标准差的第二变化;
7、步骤5,将热源引入至测试区域,获取测试区域中热源图像的测试温度数据集合,热源图像与基础图像对应,并基于位置数据获取与n组背景数据对应的n组测试数据,获取测试区域中每一所述测试数据在第三时刻的第三均值和第三标准差;
8、步骤6,获取在第三时刻和第二时刻之间、第三均值和第二均值之间的第三变化,以及第三标准差和第二标准差的第四变化;以及
9、获取在第三时刻和第一时刻之间第三均值和第一均值之间的第五变化,以及第三标准差和第一标准差的第六变化;
10、步骤7,通过第三变化、第四变化和/或第五变化、第六变化来确定当热源引入至背景图像后形成的热源图像相对于基础图像的温度分布,以此确定原始温度数据集合相对于测试温度数据集合的稳定性;确定测试区域中实际温度的分布范围,基于测试区域中实际温度的分布范围将实际测定的温度数据恢复为灰度图像。
11、进一步地,在步骤1中,获取基础图像的原始温度数据具体步骤如下:
12、第一步:修改摄像头厂家sdk,调取每一帧的温度数据并进行保存;
13、第二步:获取到温度数据是反转之后的数据,将数据恢复为正常视角。
14、进一步地,在步骤2中,基于所述位置数据对应的获取测试区域中每一背景数据在第一时刻的第一均值和第一标准差步骤如下;
15、第一步:获取第一时刻,基础图像对应的初始温度数据集合,将获取的初始温度数据集合划分成多个区域:
16、第二步:计算每块区域内每个像素位置的第一均值和第一标准差;
17、第一均值的计算公式:
18、其中表示位置出的数据均值,表示位置处的温度数据,表示当前时刻,即表示时刻位置处的温度数据,表示数据帧的总数量。
19、第一标准差的计算公式:
20、其中,表示位置处的数据的标准差。
21、进一步地,在步骤4中,获取在第二时刻和第一时刻之间第二均值和第一均值之间的第一变化的步骤如下:第一步:对相同的测试区域每个对应位置做差值:其中表示位置处差分之后的温度数据,表示初始数据中位置处的温度均值,表示间隔周期后位置处的温度均值;
22、第二步:统计每个位置处的均值范围。
23、进一步地,在步骤5中,基于所述位置数据对应的获取测试区域中每一所述测试数据在第三时刻的第三均值和第三标准差步骤如下:
24、第一步:将获取的测试温度数据集合划分成多个区域:
25、第二步:计算每块区域内每个像素位置的均值和标准差;
26、均值的计算公式:
27、其中表示位置出的数据均值,表示位置处的温度数据,表示当前时刻,即表示时刻位置处的温度数据,表示数据帧的总数量。
28、标准差的计算公式:
29、其中,表示位置处的数据的标准差。
30、进一步地,在步骤6中,获取在第三时刻和第二时刻之间第三均值和第二均值之间的第三变化步骤如下:
31、第一步:对相同的测试区域每个位置做差值:
32、其中表示位置处热源数据的第三均值与初始背景数据差分之后的温度数据,表示初始数据中位置处的温度均值,表示热源数据中位置处的温度均值;
33、第二步:统计每个位置处的均值范围。
34、进一步地,在步骤7中,将温度数据恢复为灰度图像具体步骤如下:
35、第一步:通过对比和的分布,确定温度数据的稳定性;
36、第二步:确定测试区域中实际温度的分布范围(minimum,maximum);
37、第三步:按照下式将温度数据恢复为灰度图像:
38、其中,表示位置处的温度数据,表示当前时刻,minimum表示实际场景中的最低温度,maximum表示实际场景中最高温度。
39、通过本技术可以得到测试区域在引入热源的前后温度变化以及温度数据稳定性,通过研究温度数据的稳定性可以进行有效得到依据温度数据来建立灰度图像的途径。
40、当前多数的热成像摄像头视频成像存在白平衡问题,影响后期的图像处理工作。所有通过测试热成像温度数据的稳定性并自行将温度数据转化为图像就可以减小白平衡的影响。首先,利用红外光谱摄像头,获取每一帧热成像的温度数据,热成像温度数据的帧率为5-6帧每秒,获取一分钟左右的温度数据,其中包含热成像视野中存在热源的情况,测试当热源进入场景前后一段时间内背景区域中每个像素位置的均值和标准差变化,测试热成像温度数据的稳定性后,通过规定场景中温度的范围,将温度数据恢复为灰度图像。本发明的方法简单易行,验证了热成像相机的获取温度数据的稳定性并减小了白平衡所带来的影响。
- 还没有人留言评论。精彩留言会获得点赞!