基于增量输出分解循环神经网络的交通流预测方法及系统
本发明涉及智能交通,更具体的说是涉及基于增量输出分解循环神经网络的交通流预测方法及系统。
背景技术:
1、随着智能交通系统(its)的快速发展和部署,交通流预测得到了越来越多的关注,准确的预测有利于城市交通的控制和管理,道路交通流预测是对交通流进行诱导和控制的必要前提,其不仅便于出行者制定更好的出行计划,还有利于交通管理部门做出更好的管理决策。此外,道路交通流预测在智能交通中也发挥着不可替代的作用,为许多实际的下游任务如拥堵管理和导航系统等提供高质量的解决方案。
2、随着深度学习的进步,如何基于深度神经网络构建合适的交通预测模型已成为交通领域广泛关注的问题,现有的交通流预测模型在选定的指标上普遍取得了较好的预测精度,然而很少有模型考虑到了预测的有效性,这导致尤其在面对高频变化的复杂交通数据时,模型得到看似有效但实际无效的预测结果(例如,预测结果存在大量延迟)。因此亟需一种模型,能够考虑到交通流预测中的时间延迟现象,进而实现准确有效的交通流预测。
3、因此,提出基于增量输出分解循环神经网络的交通流预测方法及系统,来解决现有技术存在的困难,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了基于增量输出分解循环神经网络的交通流预测方法及系统,通过自注意力机制定义并加入了不确定性增量,使模型的预测输出将不再是一个固定的值,而是允许一定的、灵活的幅度变化范围,从而最终实现对一个模型的值和方向的双重数据挖掘,进一步提高预测的稳定性。
2、为了实现上述目的,本发明采用如下技术方案:
3、基于增量输出分解循环神经网络的交通流预测方法,包括以下步骤:
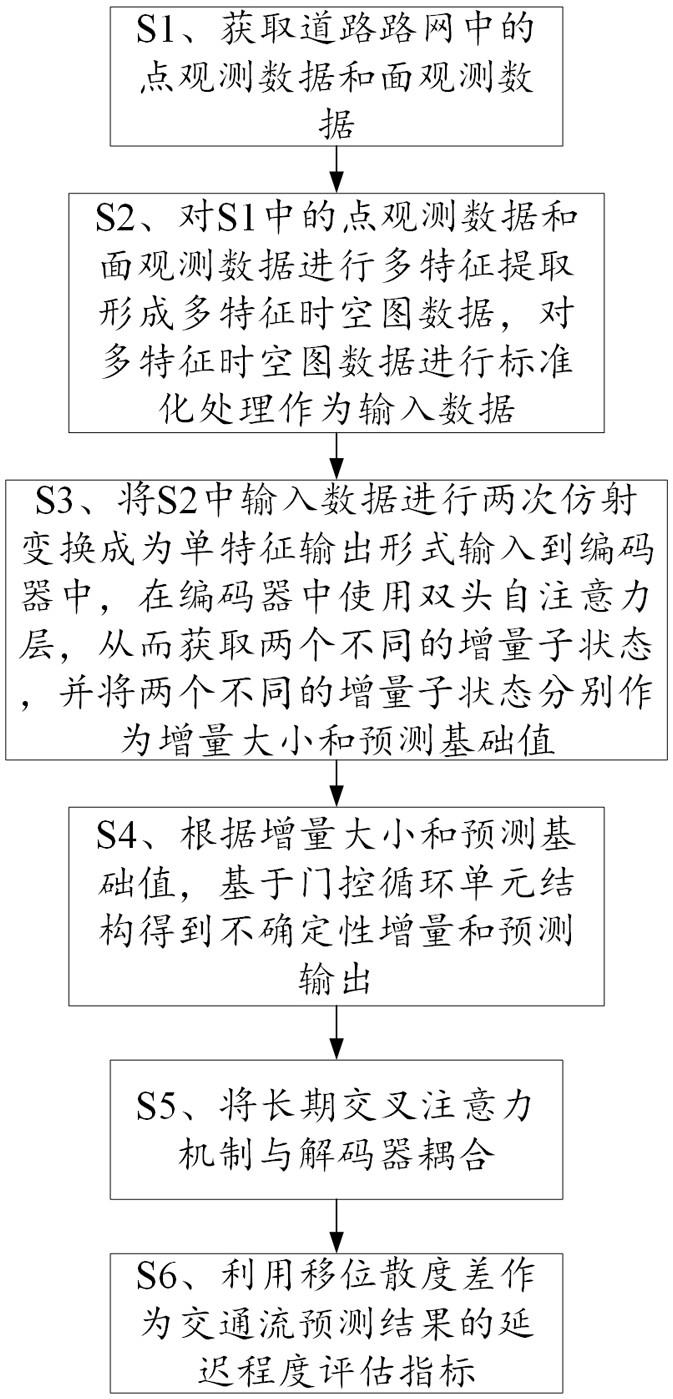
4、s1、获取道路路网中的点观测数据和面观测数据;
5、s2、对s1中的点观测数据和面观测数据进行多特征提取形成多特征时空图数据,对多特征时空图数据进行标准化处理作为输入数据;
6、s3、将s2中的输入数据进行两次仿射变换成为单特征输出形式输入到编码器中,在编码器中使用双头自注意力层,从而获取两个不同的增量子状态,并将两个不同的增量子状态分别作为增量大小和预测基础值;
7、s4、根据增量大小和预测基础值,基于门控循环单元结构得到不确定性增量和预测输出;
8、s5、将长期交叉注意力机制与解码器耦合;
9、s6、利用移位散度差作为交通流预测结果的延迟程度评估指标。
10、可选的,s2具体为:
11、s21、将目标区域定义为一个无向带权图,其中 v表示节点集,其元素为子区域; e表示包含各个子区域之间关联的边集; w表示图的加权邻接矩阵;
12、s22、在每个子区域中心位置点提取交通特征,包括时间戳、每分钟交通流量、零速定位数和一周的周期性,然后将目标区域点观测和面观测数据组织成一个多特征时空图张量,其中 n为节点, f为特征数, t为时间长度;
13、s23、将组织好的多特征时空图数据集经z-score标准化后,送入模型进行训练。
14、可选的,s3具体为:
15、s31、在模型的输入端将多特征时空图数据经过两次仿射变换为 ,,成为单特征时空图输出形式;
16、s32、将单特征时空图输出形式的数据输入到编码器中,使用如下双头自注意力层获得两个增量子状态和,并将增量子状态作为预测基础值,另一个增量子状态作为增量大小,其公式为:
17、
18、
19、其中,,表示每个图中的节点数,表示双头自注意力层;表示t时刻的单特征时空图数据,表示1到t-1时刻的单特征时空图数据,表示t+1到t时刻的单特征时空图数据。
20、可选的,s4具体为:
21、s41、通过使用增量大小和预测基础值来计算逆概率和逆方向;
22、s42、根据逆概率和逆方向基于门控循环单元结构得到不确定性增量和预测输出。
23、可选的,s41中逆概率的计算方法为:
24、
25、s41中逆方向的计算方法为:
26、
27、
28、
29、其中,表示逆概率,表示t时刻保持原方向的概率;表示sigmoid函数,通过这个函数可以将括号内的数值变为0-1范围的数值;表示为阈值矩阵,表示i从1时刻到t-1时刻的累加增量;表示阈值矩阵中的数值;表示增量矩阵中的增量数值;表示符号函数,括号内的值大于0时,函数值为1,括号内的值小于0时,函数值为-1,括号内的值等于0时,函数值为0;表示预设阈值,其作用是防止完全由累加值的符号决定;表示逆方向,表示两个概率之差的符号;
30、s42中不确定性增量的计算方法为:
31、
32、s42中预测输出的计算方法为:
33、
34、
35、
36、
37、其中,表示不确定性增量,是可学习参数,表示期望对增量大小微调的比例因子;表示增量大小;表示门控循环单元结构的重置门;表示门控循环单元结构的更新门;表示图卷积算子;和表示对应的图卷积核;表示门控循环单元在时间t-1的隐藏状态;表示连接操作;表示t时刻的候选隐藏状态;表示函数,通过这个函数可以将括号内数值变为范围的数值;表示预测的基础值;表示逐元素乘积;表示新的隐藏状态;表示预测输出;表示权重参数;表示偏差参数。
38、可选的,s5具体为:
39、s51、将预测长度k、编码器隐藏状态序列、初始输入发送到解码端;
40、s52、连接编码器的所有隐藏状态表示为;
41、s53、通过增量子状态算法得到;
42、s54、通过不确定性增量和预测输出算法得到;
43、s55、对i从1到k-1的每一步均计算得到、和。
44、可选的,s6具体为:
45、s61、假设对于长度为n的预测序列,其真实序列为,长度为s的预测序列为,偏移等于预测长度s;
46、s62、分别取l前后长度为n-s的切片,得到两个切片、,然后使用softmax函数对这两个数列进行概率商归一化得到和;
47、s63、分别计算和与f的散度,以两个散度之差作为指标,称为移位散度差sdd;
48、s64、将移位散度差sdd作为交通流预测结果的延迟程度评估指标。
49、可选的,s62中的计算方法为:
50、
51、s62中的计算方法为:
52、 。
53、可选的,s63中移位散度差sdd计算方法为:
54、
55、
56、 。
57、基于增量输出分解循环神经网络的交通流预测系统,应用上述任一项的基于增量输出分解循环神经网络的交通流预测方法,包括依次连接的数据获取模块、数据提取模块、获取状态模块、数据输出模块、耦合模块、结果评估模块;其中,
58、数据获取模块,用于获取道路路网中的点观测和面观测数据;
59、数据提取模块:对数据获取模块中的点观测数据和面观测数据进行多特征提取形成多特征时空图数据,对多特征时空图数据进行标准化处理作为输入数据;
60、获取状态模块:将数据提取模块中的输入数据进行两次仿射变换成为单特征输出形式输入到编码器中,在编码器中使用双头自注意力层,从而获取两个不同的增量子状态,并将两个不同的增量子状态分别作为增量大小和预测基础值;
61、数据输出模块:根据增量大小和预测基础值,基于门控循环单元结构得到不确定性增量和预测输出;
62、耦合模块:将长期交叉注意力机制与解码器耦合;
63、结果评估模块:利用移位散度差作为交通流预测结果的延迟程度评估指标。
64、经由上述的技术方案可知,与现有技术相比,本发明公开提供了基于增量输出分解循环神经网络的交通流预测方法及系统,具有以下有益效果:提出增量输出分解概念,获取不确定性增量和预测输出,使模型能够有效地捕捉时空依赖关系,并能够缓解交通流预测中的延迟现象,从而得到稳定有效的预测结果;使用移位散度差来评估交通流预测模型的预测结果,从而能够定量分析预测结果的延迟程度。
- 还没有人留言评论。精彩留言会获得点赞!