一种基于优盘的三维数据发布方法及装置与流程
本技术涉及数据发布,具体而言,涉及一种基于优盘的三维数据发布方法及装置。
背景技术:
1、u盘是usb(usbflashdisk)盘的简称,据谐音也称“优盘”。u盘是闪存的一种,故有时也称作闪盘。u盘与硬盘的最大不同是,它不需物理驱动器,即插即用,且其存储容量远超过软盘,极便于携带。u盘集磁盘存储技术、闪存技术及通用串行总线技术于一体。usb的端口连接电脑,是数据输入/输出的通道;主控芯片使计算机将u盘识别为可移动磁盘,是u盘的“大脑”;u盘flash(闪存)芯片保存数据,与计算机的内存不同,即使在断电后数据也不会丢失;pcb底板将各部件连接在一起,并提供数据处理的平台。
2、现目前,通过优盘对三维地图进行展示是十分困难的,因为优盘的储存能力有限,这样就不能准确且可靠的对三维地图进行展示,因此,亟需一种技术方案以克服优盘存储能力。
技术实现思路
1、为改善相关技术中存在的技术问题,本技术提供了一种基于优盘的三维数据发布方法及装置。
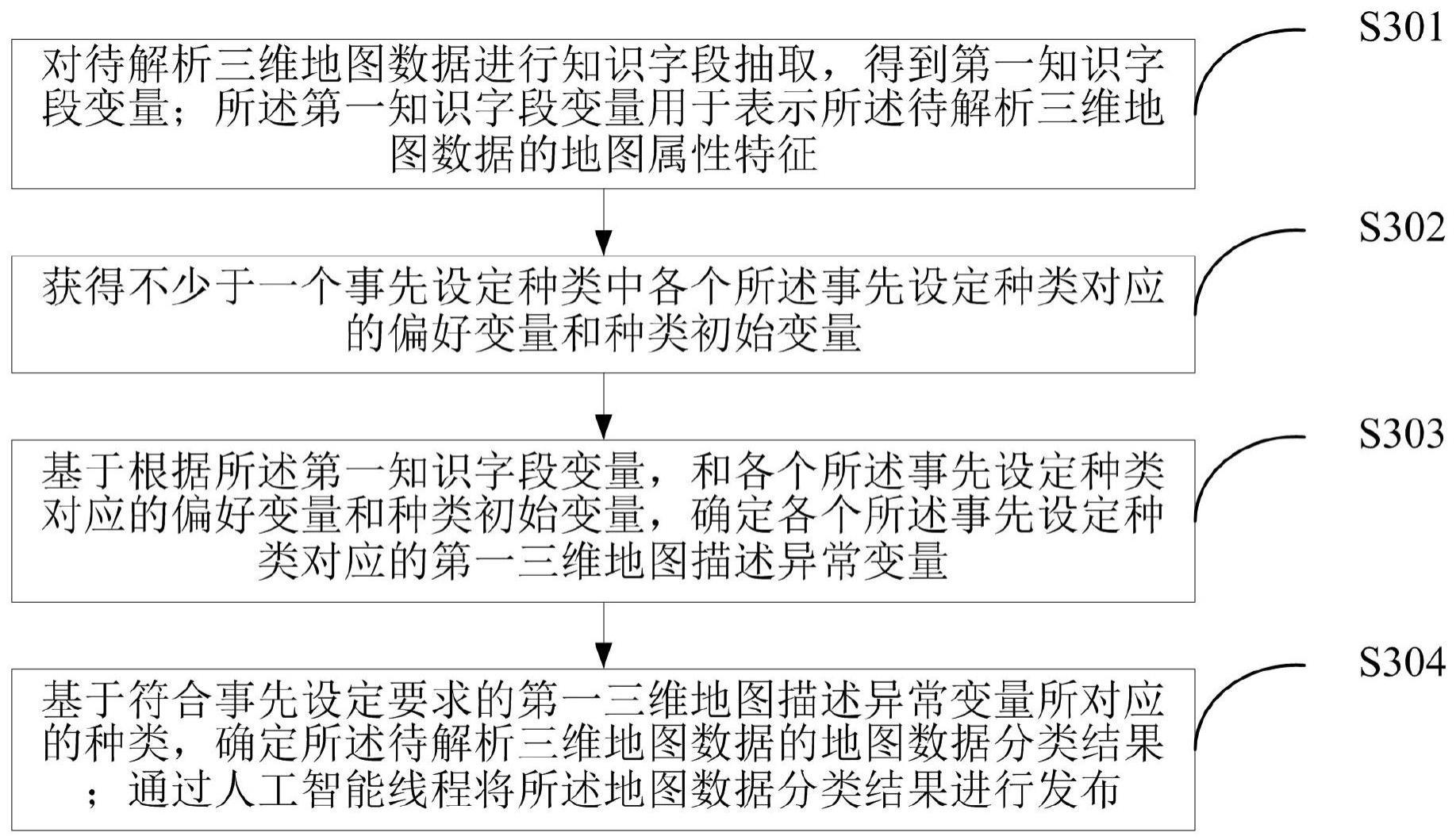
2、第一方面,提供一种基于优盘的三维数据发布方法,所述方法包括:对待解析三维地图数据进行知识字段抽取,得到第一知识字段变量;所述第一知识字段变量用于表示所述待解析三维地图数据的地图属性特征;获得不少于一个事先设定种类中各个所述事先设定种类对应的偏好变量和种类初始变量;所述偏好变量用于至少表示所述事先设定种类划分标准的关键描述字段;所述种类初始变量用于表示所述事先设定种类的种类初始描述字段;基于根据所述第一知识字段变量,和各个所述事先设定种类对应的偏好变量和种类初始变量,确定各个所述事先设定种类对应的第一三维地图描述异常变量;基于符合事先设定要求的第一三维地图描述异常变量所对应的种类,确定所述待解析三维地图数据的地图数据分类结果;通过人工智能线程将所述地图数据分类结果进行发布。
3、在一种独立实施的实施例中,所述第一知识字段变量包括若干个方向中各个所述方向对应的第一局部知识字段变量;所述偏好变量包括各个所述方向对应的局部偏好;所述种类初始变量包括各个所述方向对应的局部种类变量;所述基于根据所述第一知识字段变量,和各个所述事先设定种类对应的偏好变量和种类初始变量,确定各个所述事先设定种类对应的第一三维地图描述异常变量,包括:针对各个所述事先设定种类,根据所述事先设定种类中各个所述方向对应的第一局部知识字段变量,和各个所述方向对应的局部种类变量,确定各个所述方向对应的第一局部差异;根据各个所述方向对应的局部偏好和各个所述方向对应的第一局部差异,确定所述事先设定种类对应的第一三维地图描述异常变量。
4、在一种独立实施的实施例中,所述对待解析三维地图数据进行知识字段抽取,得到第一知识字段变量,包括:对所述待解析三维地图数据进行知识字段抽取,得到原始知识字段变量;对所述原始知识字段变量进行切割,得到各个所述方向对应的第一局部知识字段变量。
5、在一种独立实施的实施例中,所述基于符合事先设定要求的第一三维地图描述异常变量所对应的种类,确定所述待解析三维地图数据的地图数据分类结果,包括:在各个所述事先设定种类对应的第一三维地图描述异常变量中,确定最小的第一三维地图描述异常变量;将所述最小的第一三维地图描述异常变量对应的事先设定种类,确定为所述待解析三维地图数据的地图数据分类结果。
6、在一种独立实施的实施例中,所述方法通过人工智能分析模型实现,所述人工智能分析模型的配置模板包括:各个所述事先设定种类对应的配置模板集,所述配置模板集包括若干个模板地图数据,所述人工智能分析模型的配置方法包括:针对各个所述模板地图数据,通过原始分析模型获得所述模板地图数据的第二知识字段变量,以及各个所述事先设定种类对应的偏好变量和种类初始变量;基于第二三维地图描述异常变量的最小值所对应的种类,确定所述模板地图数据的回归分析地图数据分类结果,其中,所述第二三维地图描述异常变量基于所述第二知识字段变量,各个所述事先设定种类对应的偏好变量和种类初始变量确定;根据所述模板地图数据的回归分析地图数据分类结果和所述模板地图数据的分类目录,确定所述原始分析模型的量化评估结果;根据所述量化评估结果对所述事先设定分析模型进行调试,得到所述人工智能分析模型。
7、在一种独立实施的实施例中,所述通过原始分析模型获得各个所述事先设定种类对应的种类初始变量,包括:针对各个所述事先设定种类,通过所述原始分析模型获得所述事先设定种类对应的若干个模板地图数据对应的若干个第二知识字段变量;基于所述若干个第二知识字段变量,确定所述事先设定种类对应的种类初始变量。
8、在一种独立实施的实施例中,所述通过原始分析模型获得各个所述事先设定种类对应的偏好变量,包括:针对各个所述事先设定种类,基于所述事先设定种类对应的若干个模板地图数据和所述事先设定种类对应的关键知识字段变量,得到所述事先设定种类对应的偏好变量。
9、在一种独立实施的实施例中,所述基于所述事先设定种类对应的若干个模板地图数据和所述事先设定种类对应的关键知识字段变量,得到所述事先设定种类对应的偏好变量,包括:基于所述事先设定种类对应的若干个模板地图数据,确定所述事先设定种类对应的种类初始变量;基于事先设定的组合偏好,对所述事先设定种类对应的种类初始变量和所述事先设定种类对应的关键知识字段变量进行组合,得到所述事先设定种类对应的组合知识字段变量;基于所述组合知识字段变量,确定所述事先设定种类对应的偏好变量。
10、在一种独立实施的实施例中,所述基于所述事先设定种类对应的若干个模板地图数据和所述事先设定种类对应的关键知识字段变量,得到所述事先设定种类对应的偏好变量,包括:通过所述原始分析模型对所述事先设定种类对应的若干个模板地图数据进行知识字段抽取,得到所述若干个模板地图数据对应的若干个原始知识字段变量;基于事先设定的组合偏好,对各个所述模板地图数据对应的所述原始知识字段变量和所述事先设定种类对应的关键知识字段变量进行组合,得到各个所述模板地图数据对应的组合知识字段变量;依次基于各个所述模板地图数据对应的组合知识字段变量,确定各个所述模板地图数据对应的过渡偏好变量;基于各个所述模板地图数据对应的过渡偏好变量,确定所述事先设定种类对应的偏好变量。
11、在一种独立实施的实施例中,所述方法还包括:通过不少于一种关键抽取线程对所述事先设定种类的种类目录进行知识字段抽取,得到各个所述关键抽取线程对应的原始关键描述字段;基于各个所述关键抽取线程对应的关键偏好对各个所述关键抽取线程对应的原始关键描述字段进行组合,得到所述事先设定种类对应的关键知识字段变量。
12、在一种独立实施的实施例中,所述不少于一种关键抽取线程包括第一关键抽取线程,所述通过不少于一种关键抽取线程对所述事先设定种类的种类目录进行知识字段抽取,得到各个所述关键抽取线程对应的原始关键描述字段,包括:基于所述第一关键抽取线程,获得所述种类目录对应的重要内容变量集合;所述重要内容变量集合包括若干个场景重要内容变量;不同的场景重要内容变量用于表示所述种类目录在不同场景下的关联描述字段;基于所述种类目录对应的若干个场景重要内容变量,确定所述第一关键抽取线程对应的原始关键描述字段。
13、在一种独立实施的实施例中,所述基于所述第一关键抽取线程,获得各个所述种类目录对应的重要内容变量集合,包括:获得所述种类目录对应的若干个场景描述事件;各个所述场景描述事件包括所述种类目录;对各个所述场景描述事件进行遮挡处理,以得到各个场景描述事件对应的涵盖目标内容的待抽取描述事件;所述遮挡处理用于将所述场景描述事件切换为所述目标内容;将各个所述待抽取描述事件加载至所述第一关键抽取线程,得到所述种类目录在各个所述待抽取描述事件中的内容变量;所述第一关键抽取线程用于抽取所述待抽取描述事件中所述目标内容的内容变量;所述内容变量用于表示所述目标内容在所述待抽取描述事件中的关联描述字段;将所述种类目录在各个所述待抽取描述事件中的内容变量确定为所述场景重要内容变量,以得到所述种类目录对应的重要内容变量集合。
14、在一种独立实施的实施例中,所述方法包括:接收新增种类的配置指示;所述配置指示携带所述新增种类的种类目录和配置模板集;响应于所述配置指示,基于所述新增种类的种类目录和配置模板集,通过所述人工智能分析模型确定所述新增种类对应的偏好变量和种类初始变量;所述新增种类对应的偏好变量和种类初始变量用于确定所述待解析三维地图数据在所述新增种类对应的第一三维地图描述异常变量。
15、在一种独立实施的实施例中,所述基于所述新增种类的种类目录和配置模板集,通过所述人工智能分析模型确定所述新增种类对应的偏好变量和种类初始变量,包括:基于所述新增种类的配置模板集对应的若干个模板地图数据,通过所述人工智能分析模型确定所述新增种类对应的种类初始变量;基于所述新增种类对应的种类初始变量,和所述新增种类对应的关键知识字段变量确定所述新增种类对应的偏好变量;所述关键知识字段变量基于所述新增种类的种类目录确定。
16、第二方面,提供一种基于优盘的三维数据发布装置,包括:
17、变量抽取模块,用于对待解析三维地图数据进行知识字段抽取,得到第一知识字段变量;所述第一知识字段变量用于表示所述待解析三维地图数据的地图属性特征;
18、变量获得模块,用于获得不少于一个事先设定种类中各个所述事先设定种类对应的偏好变量和种类初始变量;所述偏好变量用于至少表示所述事先设定种类划分标准的关键描述字段;所述种类初始变量用于表示所述事先设定种类的种类初始描述字段;
19、变量确定模块,用于基于根据所述第一知识字段变量,和各个所述事先设定种类对应的偏好变量和种类初始变量,确定各个所述事先设定种类对应的第一三维地图描述异常变量;
20、结果发布模块,用于基于符合事先设定要求的第一三维地图描述异常变量所对应的种类,确定所述待解析三维地图数据的地图数据分类结果;通过人工智能线程将所述地图数据分类结果进行发布。
21、本技术实施例所提供的一种基于优盘的三维数据发布方法及装置,本技术实施例通过抽取待解析三维地图数据的第一知识字段变量,并与各个事先设定种类对应的偏好变量和种类初始变量确定第一三维地图描述异常变量,根据各个事先设定种类对应的第一三维地图描述异常变量确定该待解析三维地图数据的地图数据分类结果。由于该偏好变量表示了事先设定种类划分标准的关键描述字段,该种类初始变量用于表示事先设定种类的种类初始描述字段,因此,可以通过该第一三维地图描述异常变量确定该待解析三维地图数据与各事先设定种类的关键描述字段之间的差异,进而将符合事先设定要求的第一三维地图描述异常变量所对应的种类确定为该待解析三维地图数据的地图数据分类结果。由此,通过结合事先设定种类的关键描述字段,对抽取的第一知识字段变量进行分类,提升了待解析三维地图数据的分类精确性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!