一种融合不确定性建模的行程时间预测方法
本发明属于智慧交通与导航领域,具体涉及一种融合不确定性建模的行程时间预测方法。
背景技术:
1、预计到达时间(estimated time of arrival,eta),即一对起点和目的地位置之间的旅行时间估计,是指通过分析路段行程时间的历史变化规律,基于历史交通数据预测未来给定请求时刻从指定起点到达指定目的地所需的时间。它是数字地图和导航系统中基于位置的重要服务之一,也是叫车应用程序中重要的后端服务之一,已成为影响在线叫车过程不同阶段决策的核心组成部分。eta正变得越来越重要并得到广泛的应用,因此需要不断提高预计到达时间的准确性和精度。
2、目前eta常见的应用方法是输入起止点后,基于服务商特定的路径决策算法生成相应的路径。输出预计到达时间。随着深度学习的发展,有越来越多深度学习的方法应用到eta问题上,例如,有学者提出基于深度学习的广深循环学习模型,通过提出这种系统的机器学习解决方案,克服了现有方法数据覆盖不足,泛化能力弱和信息使用不足的缺点。但是现有的eta预测方法没有充分考虑复杂的时空动态性,预测的准确性和精度仍然有待提高。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,本发明旨在提供一种融合不确定性建模的行程时间预测方法,以量化时间预测结果的不确定性,在给出具体时间的结果基础上还会输出针对结果的误差范围,为用户提供更可靠的信息,帮助客户在路线选择时做出更加准确的决策,提高对用户的服务水平。
2、为了实现上述目的,本发明实施例采用如下技术方案:
3、一种融合不确定性建模的行程时间预测方法,包括:
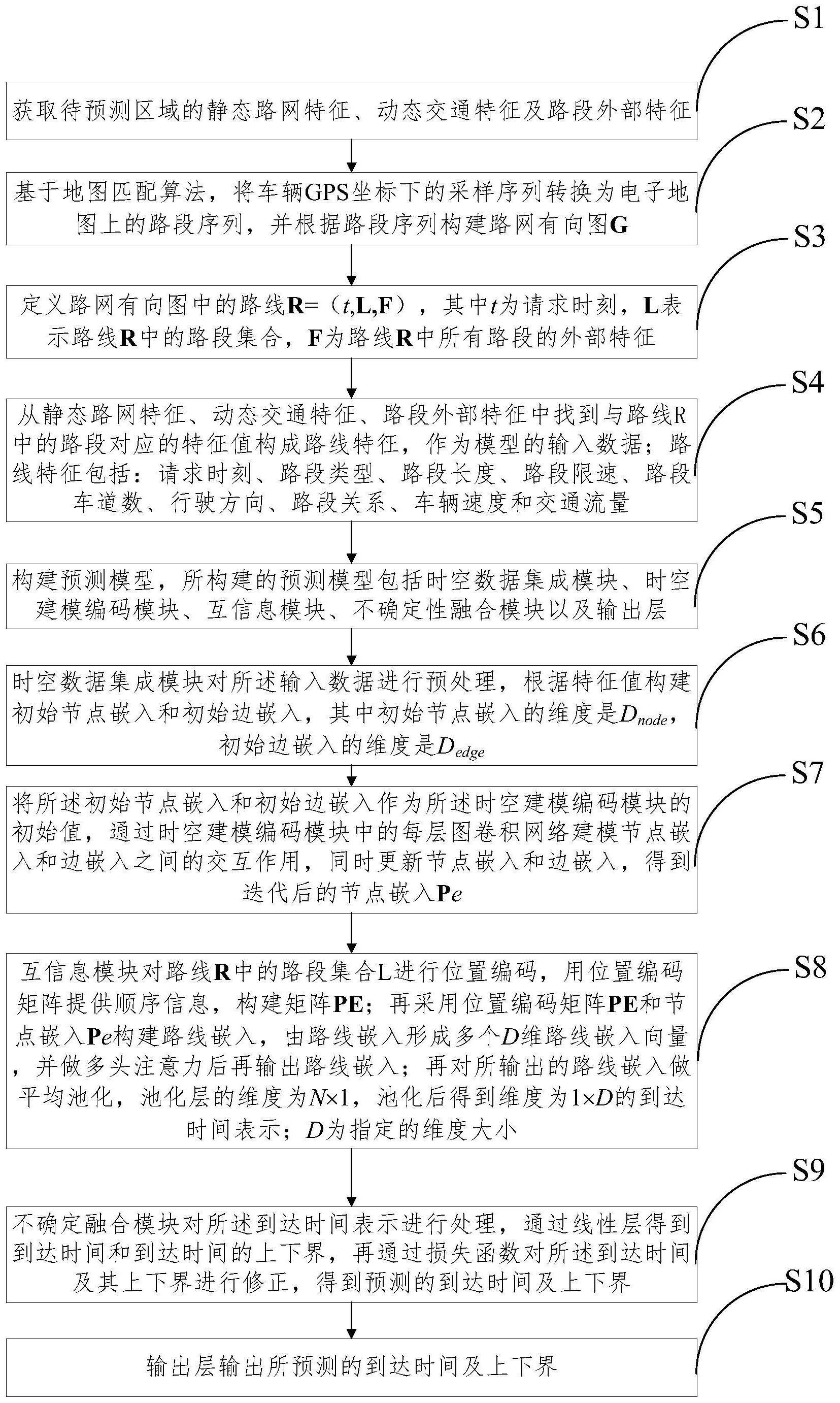
4、步骤s1,获取待预测区域的静态路网特征、动态交通特征及路段外部特征;
5、步骤s2,基于地图匹配算法,将车辆gps坐标下的采样序列转换为电子地图上的路段序列,并根据路段序列构建路网有向图g;
6、步骤s3,定义路网有向图g中的路线r=(t,l,f),其中t为请求时刻,l=[l1,l2,l3,...,ln]表示路线r中的路段集合,n为路线r中包含的路段数,f为路线r中所有路段的外部特征;
7、步骤s4,从静态路网特征、动态交通特征、路段外部特征中找到与路线r中的路段对应的特征值构成路线特征,作为模型的输入数据;所述路线特征包括:请求时刻、路段类型、路段长度、路段限速、路段车道数、行驶方向、路段关系、车辆速度和交通流量;
8、步骤s5,构建预测模型,所构建的预测模型包括时空数据集成模块、时空建模编码模块、互信息模块、不确定性融合模块以及输出层;
9、步骤s6,时空数据集成模块对所述输入数据进行预处理,根据特征值构建初始节点嵌入和初始边嵌入,其中初始节点嵌入的维度是dnode,初始边嵌入的维度是dedge;
10、步骤s7,将所述初始节点嵌入和初始边嵌入作为所述时空建模编码模块的初始值,通过时空建模编码模块中的每层图卷积网络建模节点嵌入和边嵌入之间的交互作用,同时更新节点嵌入和边嵌入,得到迭代后的节点嵌入pe;
11、步骤s8,互信息模块对路线r中的路段集合l进行位置编码,用位置编码矩阵提供顺序信息,构建矩阵pe;再采用位置编码矩阵pe和节点嵌入pe构建路线嵌入re,由路线嵌入形成多个d维路线嵌入向量,并做多头注意力后再输出路线嵌入再对所输出的路线嵌入re′做平均池化,池化层的维度为n×1,池化后得到维度为1×d的到达时间表示;d为指定的维度大小,表示维度大小为n×d的数域;
12、步骤s9,不确定融合模块对所述到达时间表示进行处理,通过线性层得到到达时间和到达时间的上下界,再通过损失函数对所述到达时间及其上下界进行修正,得到预测的到达时间及上下界;
13、步骤s10,输出层输出所预测的到达时间及上下界。
14、作为本发明的一个优选实施例,步骤s5所构建的预测模型中:
15、时空数据集成模块包括矩阵编码组件和矩阵运算组件;时空建模编码模块由多层图卷积神经网络组成,用于提取数据的时空相关性,输出相应的边嵌入和节点嵌入;互信息模块包括位置编码器、路线嵌入计算组件、多头注意力组件和池化层;不确定性融合模块包括线性层及损失函数计算组件。
16、作为本发明的一个优选实施例,所述静态路网特征,包括路段类型、路段长度、路段限速、路段车道数、行驶方向、路段关系;所述动态交通特征,包括车辆速度;所述路段外部特征,包括交通流量。
17、作为本发明的一个优选实施例,所述路网有向图g定义为g=(v,e)且l∈v,eij∈e,其中,l∈v为有向图中的节点,代表一个路段,v是有向图g的节点集合,表示路段集合;eij∈e为有向图中的边,表示路段li和路段lj之间是连通的,如果路段li和lj连通,则两者之间的边eij存在,如果路段li和lj不连通,则两者之间的边eij不存在;e是有向图g的边集合,表示路段之间的邻接关系的集合。
18、作为本发明的一个优选实施例,步骤s3中所述路段的外部特征f,根据路线r获得;当外部特征f为流量特征时,具体操作如下:根据路网的经纬度范围得到对应的区域,之后按照预定的大小将该区域划分为大小相等的网格,在请求时刻t时,查询路线r经过的所有网格中有多少车辆,统计涉及所有路段的流量作为流量特征统计量加入f。
19、作为本发明的一个优选实施例,步骤s6中,与初始节点嵌入相关的特征包括:请求时刻、路段类型、路段长度、路段限速、路段车道数、行驶方向、车辆速度和交通流量,与初始边嵌入相关的特征包括路段关系。
20、作为本发明的一个优选实施例,步骤s7在每层图卷积网络中,在节点和边的信息聚合图卷积的过程如下:
21、输入初始节点嵌入:
22、
23、式(1)中,表示维度大小为n×dnode的数域,p0表示初始节点嵌入;和
24、初始边嵌入:
25、
26、式(2)中,表示维度大小为n×dedge的数域,s0表示初始边嵌入;
27、分别对节点嵌入与边嵌入进行迭代;
28、其中,节点嵌入迭代的操作公式如下:
29、
30、式(3)中,pim表示第m层图卷积第i个节点嵌入,pim+1表示第m+1层图卷积第i个节点嵌入,表示第m层图卷积第i个节点和第j个节点间的边嵌入,ni表示以节点i为中心的邻居集合,agg(·)为聚合函数;更新函数f由非线性变换组成,具体定义如下:
31、
32、式(4)中,relu表示训练多层图卷积网络的激活函数,bn表示批量归一化的操作,σ表示sigmoid激活函数,⊙表示哈达马积,为可学习参数;
33、边嵌入迭代的操作公式如下:
34、
35、式(5)中,sijm+1表示第m+1层图卷积第i个节点和第j个节点间的边嵌入,pjm表示第m层图卷积第j个节点嵌入;函数g表示非线性变换,具体内容为:
36、
37、式(6)中,为可学习参数;
38、得到图卷积后的最终节点嵌入和最终边嵌入为:
39、最终节点嵌入:
40、最终边嵌入:
41、作为本发明的一个优选实施例,步骤s8中构建矩阵pe,pe中第a行、第2b列和(2b+1)列上的元素为:
42、
43、
44、式(7-1)和式(7-2)中sin和cos分别表示正余弦函数。
45、作为本发明的一个优选实施例,步骤s8中采用位置编码矩阵pe和节点嵌入pe构建路线嵌入re,具体地,通过节点嵌入pe和位置编码矩阵相加得到路线嵌入re:
46、
47、式(8)中,表示连接操作,re为模型输出的路线嵌入。
48、作为本发明的一个优选实施例,步骤s9中采用分位数回归的方法进行不确定性分析,其中分位数回归损失函数如下:
49、
50、式(10)中,y为真实的到达所需时间,表示预测的下界,代表预测的到达时间,表示预测的上界,ql,qf,qu,为各自对应的分位数。本发明具有如下有益效果:
51、本发明实施例所提供的融合不确定性建模的行程时间预测方法,相比于以前的eta模型,采用多层图卷积融合注意力机制建模行程时间,使得预测结果更加精确;通过采用分位数回归进行不确定性建模,给出到达时间的上下界和均值,量化出时间预测结果的不确定性,在给出具体时间的结果基础上还会输出针对结果的误差范围,为用户提供更可靠的信息,帮助客户在路线选择时做出更加准确的决策,提高对用户的服务水平;同时,不确定性量化结果也可以作为eta模型的评价指标,有助于eta领域的发展。
52、当然,实施本发明的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!