基于精密三轴转台的远距离成像相机内外参分离标定方法
本发明属于航空航天测量相机标定领域,具体涉及一种基于精密三轴转台的远距离成像相机内外参分离标定方法。
背景技术:
1、以航空摄影测量和航天天体敏感为代表的视觉测量应用对几千米乃至无穷远距离的目标进行成像进而计算获取其他信息。为实现高精度测量,必须在出厂前地面环境下对远距离成像相机的焦距、主点、畸变等成像参数进行精确标定。在地面基于高精度转台的实验室标定方法因精度高、可操作性强,被广泛应用。基于转台的标定方法中,使用单个可调节景深标定点的方法原理简单,操作方便。理想情况下,相机安装在转台上且相机坐标系坐标轴与转台坐标系各坐标轴方向一致,单个标定点(可用可调焦平行光管构建)正好在转台零位时的相机成像光轴上。然而在实际情况下,相机坐标系与转台坐标系之间,以及标定点相对转台零位的安装偏差是不可避免的。通过复杂而精细的安装对准操作去掉这些偏差会带来巨大的成本且很难充分保证精度,因此研究不依赖于人工调整的标定方法和算法具有重要意义。
2、传统的基于内外参数集成建模的标定方法采用集成式优化方法同时求解所有内、外参数时,必然存在内、外参数耦合问题,尤其是标定点相对转台零位的偏差与相机主点具有强耦合关系。这种耦合作用的结果是,只有当所有参数一起使用时,才能获得高精度的测量结果,只使用部分参数或参数单独使用时,精度可能会降低。然而,在大多数应用中,标定后的外参尤其是标定点相对转台零位的偏差是不需要的,往往只有相机内参才是测量所需的。因此,为了保证测量精度,能实现内外参的分离并主要针对内参标定的方法具有重要意义。然而传统的内外参分离的标定方法虽然取得了良好的标定结果,但求解标定点相对转台零位矢量方向的过程需要反复精细的调校,期间人工参与较多,使得该方法的效率并不高。
3、可见,传统的基于内外参数集成建模的标定方法和传统的内外参分离的标定方法都存在各自的不足,难以平衡相机标定效率和精度要求。
技术实现思路
1、针对上述远距离成像相机的标定问题,本发明的目的在于提供一种基于精密三轴转台的远距离成像相机内外参分离标定方法,其为基于精密三轴转台和单个标定点的三步标定法,该方法无需求解标定点相对转台零位的矢量关系,且标定过程无需人工调校。
2、为实现上述目的,达到上述技术效果,本发明采用的技术方案为:
3、一种基于精密三轴转台的远距离成像相机内外参分离标定方法,采用精密三轴转台实现标定的高精度;采用远距离成像相机内外参分离标定模型实现标定的高效率,涉及精密三轴转台自动采集两组光点亚像素坐标,远距离成像相机透视投影模型和畸变模型,主要内参和外参的初始估计和基于l-m方法的以同名点对应误差最小为目标的所有内外参联合优化。
4、所述基于精密三轴转台自动采集两组光点亚像素坐标,通过设定好中框、外框的旋转角度值文件,仅需人工调节内框为0°或90°,转台在自动旋转过程相机采集旋转角度值的对应的光点亚像素坐标。
5、本发明的一种基于精密三轴转台的远距离成像相机内外参分离标定方法包括如下步骤:
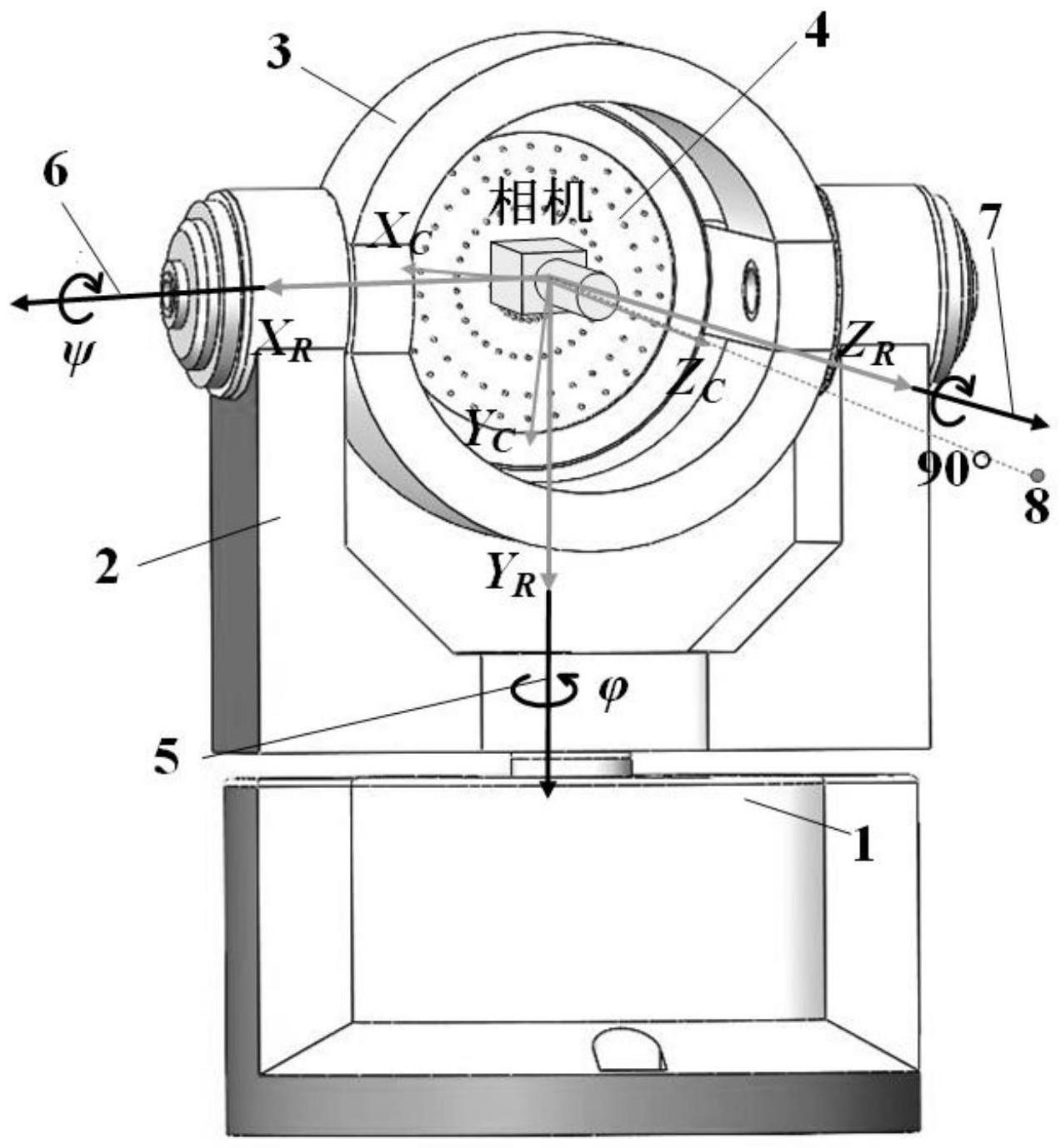
6、步骤a、基于精密三轴转台的转动和由可调焦平行光管构造的单个光点构成相机标定系统,在内框转动不同角度的条件下,通过中框和外框的一系列转动,相机自动采集两组标定点成像的光点亚像素坐标;平行光管的单个光点为标定点,平行光管的调焦位置与测量相机的测量位置基本相同;
7、步骤b、根据步骤a中的两组标定点成像的光点亚像素坐标,建立两组纯旋转运动下的同名点对应关系,从而线性求解远距离成像相机的主要内参的初始估计值,所述主要内参包括焦距ax,ay和图像主点的像素坐标u0,v0;
8、步骤c、针对步骤b中构建的同名点对应关系,构建关于外参的约束方程,从而线性求解相机外参的初始估计值,所述相机外参为即转台坐标系到相机坐标系的转换矩阵;
9、步骤d、根据步骤b和步骤c中线性求解的主要内参的初始估计值和相机外参的初始估计值,以同名点对应误差最小为最优化目标,迭代优化所有相机内外参,获得相机内外参的最优估计值。
10、进一步地,所述步骤a中,所述相机为远距离成像相机,置于精密三轴转台中心,平行光管置于转台前方,用于模拟远距离处的单个标定点;在转台的内框转动0°和90°的条件下,通过设定好一系列固定的旋转角度值使转台中框和外框旋转,同时所述相机自动采集两组标定点成像的光点图像,并根据光点质心获得光点亚像素坐标,其中中框和外框转动角度范围一般可均设为-10°到10°,转动角度间隔为2°;但由于所述相机视场限制,当中框和外框转动角度为(±10°±10°)、(±10°±8°)和(±8°±10°)时所述相机无法采集到光点图像,因此滤除这12组旋转角度值,总共109组旋转角度值。
11、进一步地,所述步骤a中,对于每次中框相对外框转动,下一个转动位置相对上一个位置同样始终保持一个固定转动角度,由于标定点在远距离处,中框转动方向的下一位置相对当前位置均为一个固定的纯旋转运动。
12、进一步地,所述步骤a包括:
13、单个标定点在转台一系列旋转下成像形成两组光点亚像素坐标,远距离成像相机透视投影模型如下:
14、
15、其中:
16、
17、其中,ρ是比例系数,m=[u(i,j) v(i,j) 1]t是标定点在相机图像下的像素坐标,rv0是在转台坐标系下转台零位时的标定点矢量,cv(i,j)是转台旋转后在相机坐标系下的标定点矢量,k是相机内参矩阵,由主要内参ax,ay,u0,v0决定,ax,ay分别是x轴和y轴上的归一化焦距,u0,v0是图像主点的像素坐标;rr(i,j)是转台外框旋转角度中框旋转角度ψ(j)的旋转矩阵,是转台坐标系到相机坐标系的转换矩阵,即相机外参;
18、相机畸变模型如下:
19、
20、其中,(xu,yu)和(xd,yd)是去畸变像素点坐标和未去畸变的像素点坐标,r是(xu,yu)到主点(u0,v0)的物理距离,k1,k2是相机的前两项径向畸变系数,p1,p2是相机的前两项切向畸变系数。
21、进一步地,所述步骤b包括:转台通过转动对前方的单个标定点形成一系列成像点,等效为一簇虚拟标定点阵列在像平面上的一次成像;对于第一组转动,中框和外框转动n次,等效为n个点阵列;对于每次中框相对外框转动,下一个转动位置相对上一个位置始终保持一个固定转动角度δ,根据远距离成像相机透视投影模型,有:
22、
23、其中,rv(i,j)是rv0矢量在转台外框旋转角度中框旋转角度ψ(j)后在转台坐标系下的标定点矢量,rv(i,j+1)是rv0矢量在转台外框旋转角度中框旋转角度ψ(j)+δ后在转台坐标系下的标定点矢量,rδ为:
24、
25、式(4)表明,任一标定位置下,中框转动方向的下一位置相对当前位置均为一个固定的纯旋转;
26、令m1和m2分别是中框转动的前一个位置和后一个位置下标定点在相机图像上的投影点,根据式(1)和式(4)有:
27、
28、其中,ρ1和ρ2是齐次系数,rv(i,j)是转台旋转后在转台坐标系下的标定点矢量;式(6)表明m1和m2是纯旋转下的同名点对应,因此所有点阵列在中框转动方向划分为两组同名点;
29、第二组转动在中框和外框转动的基础上转动内框90°,将第一组转动中的两组同名点整体转动90°,第二组转动下的同名点对应方程如下:
30、
31、其中,r90o为内框转动角度,表达式如下:
32、
33、根据式(6)和(7),进一步推导同名点对应方程;消去rv(i,j),得:
34、ρm2=hk·m1,k=1,2 (9)
35、其中,ρ=ρ2/ρ1是齐次系数,hk,k=1,2为两组纯旋转对应的单应矩阵,两组纯旋转对应的单应矩阵:
36、
37、其中,公式右侧上标-1表示矩阵取逆操作。h1和h2通过同名点对应关系求解,接下来利用已知的单应矩阵hk,k=1,2来求解内参矩阵k;
38、令ω=(kkt)-1是绝对二次曲线的像,ω*=kkt是绝对二次曲线图像ω的对偶,则根据式(10)将无关的旋转矩阵消除,将hk,k=1,2进行行列式归一化,建立起ω*与hk,k=1,2的约束关系:
39、
40、其中,ω*为3×3对称矩阵,只包含6个元素,则式(11)构成关于6个未知量的6个线性约束方程;将ω*的6个未知元素记为x,则式(11)变换为关于x的齐次线性形式:
41、cx=0 (12)
42、其中,c是由hk,k=1,2的元素构成的6×6矩阵;根据式(11)通过两组点对应即构建6个约束方程,从而线性求解出x的6个未知量;进一步计算求得ω*和ω;ω展开后的具体表达式如下:
43、
44、根据式(13),得到相机内参主要参数ax,ay,u0和v0的初始估计值。
45、进一步地,所述步骤c包括:相机内参矩阵k求解后线性解算相机坐标系和转台坐标系之间的旋转矩阵式(10)转换为:
46、akx=xbk,k=1,2 (14)
47、其中,
48、
49、其中,ak矩阵首先通过svd分解变换为单位正交矩阵;令:
50、α1=loga1,α2=loga2,β1=logb1,β2=logb2 (16)
51、上式中α1、α2、β1和β2均为旋转向量形式,则具有线性解:
52、
53、其中,m=(α1α2α1×α2),n=(β1β2β1×β2)。
54、进一步地,所述步骤d包括:基于纯旋转运动前后的点对应残余误差最小建立最优化目标方程进行求解;确定最小化目标函数如下:
55、
56、其中,和分别是纯旋转前和纯旋转后去畸变图像点,k是纯旋转运动的序号,n是中框和外框旋转角度值的组数;以线性求解的主要内参ax,ay,u0,v0和的初始估计值作为初值,畸变系数k1,k2,p1,p2的初值均为0,利用列文伯格-马夸尔特方法(l-m方法)进行最优化求解得到最终标定结果。
57、本发明与现有基于三轴转台的内外参数集成建模的标定方法和内外参分离的标定方法相比的优点在于:
58、(1)传统的基于三轴转台的内外参数集成建模的标定方法只有当所有参数一起使用时,才能获得高精度的测量结果,当只使用部分参数或参数单独使用时,精度可能会降低。而本发明的内外参分离方法将耦合的参数分离开,提高了单个参数的精度;
59、(2)传统的基于三轴转台的内外参数分离的标定方法在求解标定点相对转台零位矢量方向rv0的过程需要反复精细的调校,期间人工参与较多,使得该方法的效率并不高,而本发明的内外参分离方法通过远距离成像相机内外参分离标定模型将标定点相对转台零位矢量rv0从原理推导过程中消去,标定过程无需人工调校,只需通过模型进行理论计算,在保持标定高精度的同时大大提高了标定的效率。
- 还没有人留言评论。精彩留言会获得点赞!