一种无人机巡检安全管理方法、装置以及系统与流程
本发明涉及无人机巡检安全管理,尤其涉及一种无人机巡检安全管理方法、装置、计算机可读存储介质及系统。
背景技术:
1、无人机是一个高度集成的通信设备,内部装载多种电子设备,在磁感应强度较高的区域会受到严重干扰。同时无人机自身的存在的金属尖端部位在电场中很容易引发电荷积聚和场强畸变,导致击穿现象的发生,电场过大也会给无人机内部器件造成损害。所以无人机进行变电站巡检任务时,变电站内部复杂的电磁环境,会对无人机的安全、操控以及通信性能产生明显的影响。推动无人机在电力行业的发展,需要为无人机在变电站巡检的安全距离提供可靠的数据。
2、在现有技术中,现今无人机进行巡检的作业时安全距离全靠操作人员的现场观测和积累经验来判断,没有实际的数据作为支撑。
3、但是,现有技术仍存在如下缺陷:无法对无人机巡检区域的三维电场进行仿真,无法提供准确的安全距离数据支撑。
4、因此,当前需要一种无人机巡检安全管理方法、装置、计算机可读存储介质以及系统,从而克服现有技术中存在的上述缺陷。
技术实现思路
1、本发明实施例提供一种无人机巡检安全管理方法、装置、计算机可读存储介质以及系统,从而提升安全距离判断的准确性。
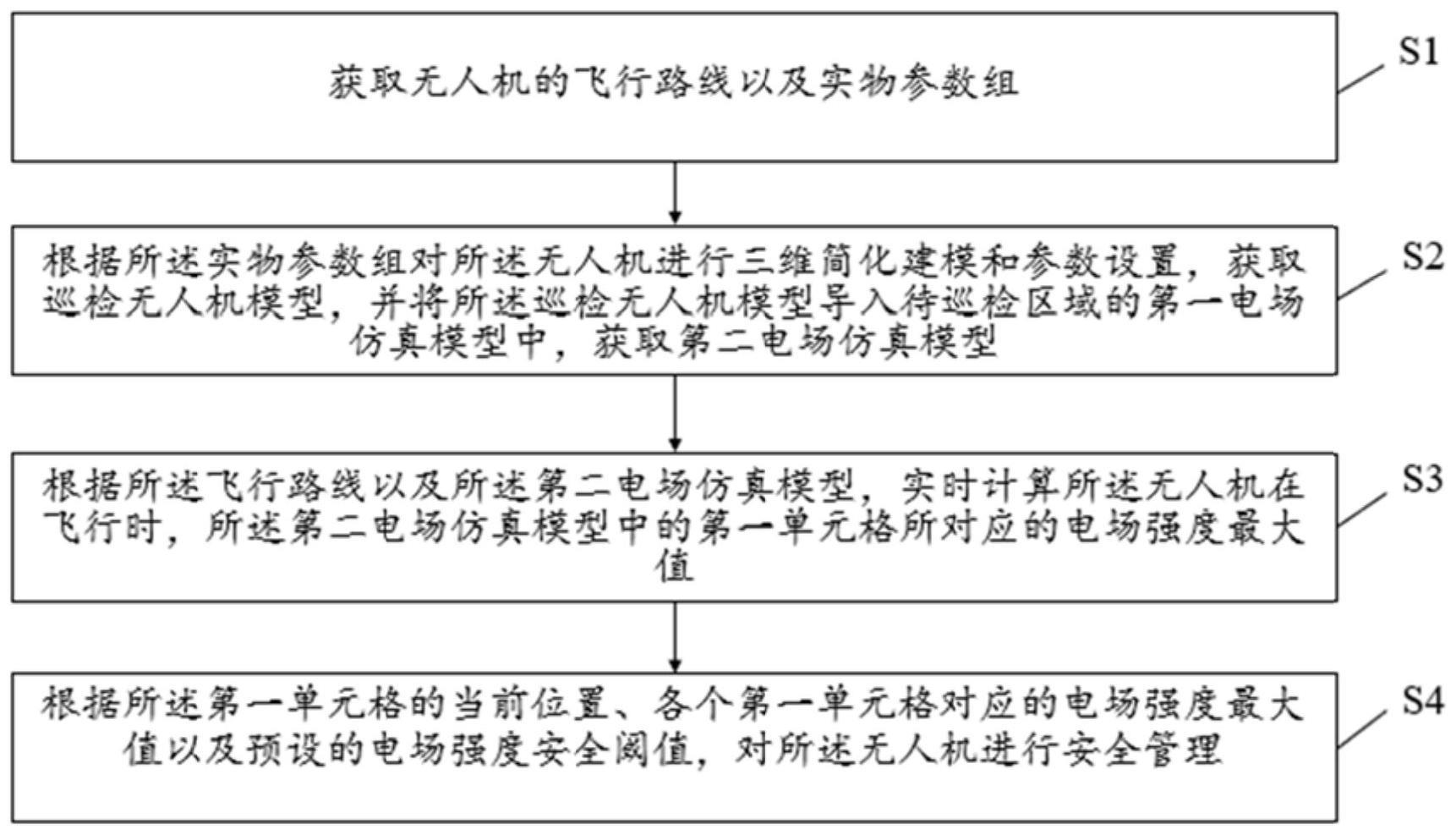
2、本发明一实施例提供一种无人机巡检安全管理方法,所述安全管理方法包括:获取无人机的飞行路线以及实物参数组;根据所述实物参数组对所述无人机进行三维简化建模和参数设置,获取巡检无人机模型,并将所述巡检无人机模型导入待巡检区域的第一电场仿真模型中,获取第二电场仿真模型;所述实物参数组包括无人机部件数据以及尺寸数据;所述无人机部件数据包括部件、部件尺寸以及部件材料;根据所述飞行路线以及所述第二电场仿真模型,实时计算所述无人机在飞行时,所述第二电场仿真模型中的第一单元格所对应的电场强度最大值;所述第一单元格为与所述巡检无人机模型表面相距预设的距离范围的各个单元格;根据所述第一单元格的当前位置、各个第一单元格对应的电场强度最大值以及预设的电场强度安全阈值,对所述无人机进行安全管理。
3、作为上述方案的改进,将所述巡检无人机模型导入待巡检区域的第一电场仿真模型中,获取第二电场仿真模型,具体包括:根据待巡检区域对应的实际参数,设置预设的第一电场仿真模型中的模型尺寸、材料属性以及对应的静电边界条件,并将所述巡检无人机模型导入第一电场仿真模型中以获取电场仿真模型;根据所述模型尺寸以及所述尺寸数据,调整所述巡检无人机模型和所述第一电场仿真模型的相对大小,在所述电场仿真模型外加一个具有预设形状的空气域,并将所述空气域的相对介电常数设置为预设值,获得第二电场仿真模型;所述预设形状为长方体;根据预设的网格化范围对所述第二电场仿真模型进行网格剖分。
4、作为上述方案的改进,根据所述飞行路线以及所述第二电场仿真模型,实时计算所述无人机在飞行时,所述第二电场仿真模型中的第一单元格所对应的电场强度最大值,具体包括:根据所述飞行路线,获取所述无人机当前在所述第二电场仿真模型中的第一位置;根据所述第一位置与所述第二电场仿真模型,确定所述无人机当前与导线的相对位置,根据所述相对位置,仿真计算所述无人机表面的各个第一单元格在所述第一位置时的电场强度最大值。
5、作为上述方案的改进,根据所述实物参数组对所述无人机进行三维简化建模和参数设置,获取巡检无人机模型,具体包括:根据预设的部件筛选标准,从所述部件中筛选出用于三维简化建模的第一部件,并获取各个第一部件对应的第一部件尺寸以及第一部件材料;根据第一部件、第一部件尺寸对所述无人机进行建模以获取巡检无人机模型,并对所述巡检无人机模型进行实心处理;分别根据第一部件材料,在所述巡检无人机模型中设置对应的第一部件的第一特征参数。
6、作为上述方案的改进,根据所述第一单元格的当前位置、各个第一单元格对应的电场强度最大值以及预设的电场强度安全阈值,对所述无人机进行安全管理,具体包括:判断所述电场强度最大值是否小于所述电场强度安全阈值;若否,则根据所述第一单元格的当前位置,计算获取所述第一单元格与导线之间的当前距离,并根据所述飞行路线、所述当前距离以及所述当前位置,向用户发送预警报告。
7、本发明另一实施例对应提供了一种无人机巡检安全管理装置,所述安全管理装置包括参数获取单元、建模设置单元、实时计算单元以及判断管理单元,其中,所述参数获取单元用于获取无人机的飞行路线以及实物参数组;所述建模设置单元用于根据所述实物参数组对所述无人机进行三维简化建模和参数设置,获取巡检无人机模型,并将所述巡检无人机模型导入待巡检区域的第一电场仿真模型中,获取第二电场仿真模型;所述实物参数组包括无人机部件数据以及尺寸数据;所述无人机部件数据包括部件、部件尺寸以及部件材料;所述实时计算单元用于根据所述飞行路线以及所述第二电场仿真模型,实时计算所述无人机在飞行时,所述第二电场仿真模型中的第一单元格所对应的电场强度最大值;所述第一单元格为与所述巡检无人机模型表面相距预设的距离范围的各个单元格;所述判断管理单元用于根据所述第一单元格的当前位置、各个第一单元格对应的电场强度最大值以及预设的电场强度安全阈值,对所述无人机进行安全管理。
8、作为上述方案的改进,所述建模设置单元还用于:根据待巡检区域对应的实际参数,设置预设的第一电场仿真模型中的模型尺寸、材料属性以及对应的静电边界条件,并将所述巡检无人机模型导入第一电场仿真模型中以获取电场仿真模型;根据所述模型尺寸以及所述尺寸数据,调整所述巡检无人机模型和所述第一电场仿真模型的相对大小,在所述电场仿真模型外加一个具有预设形状的空气域,并将所述空气域的相对介电常数设置为预设值,获得第二电场仿真模型;所述预设形状为长方体;根据预设的网格化范围对所述第二电场仿真模型进行网格剖分。
9、作为上述方案的改进,所述建模设置单元还用于:根据预设的部件筛选标准,从所述部件中筛选出用于三维简化建模的第一部件,并获取各个第一部件对应的第一部件尺寸以及第一部件材料;根据第一部件、第一部件尺寸对所述无人机进行建模以获取巡检无人机模型,并对所述巡检无人机模型进行实心处理;分别根据第一部件材料,在所述巡检无人机模型中设置对应的第一部件的第一特征参数。
10、作为上述方案的改进,所述实时计算单元还用于:根据所述飞行路线,获取所述无人机当前在所述第二电场仿真模型中的第一位置;根据所述第一位置与所述第二电场仿真模型,确定所述无人机当前与导线的相对位置,根据所述相对位置,仿真计算所述无人机表面的各个第一单元格在所述第一位置时的电场强度最大值。
11、作为上述方案的改进,所述判断管理单元还用于:判断所述电场强度最大值是否小于所述电场强度安全阈值;若否,则根据所述第一单元格的当前位置,计算获取所述第一单元格与导线之间的当前距离,并根据所述飞行路线、所述当前距离以及所述当前位置,向用户发送预警报告。
12、本发明另一实施例提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如前所述的无人机巡检安全管理方法。
13、本发明另一实施例提供了一种无人机巡检安全管理系统,所述安全管理系统包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如前所述的无人机巡检安全管理方法。
14、与现有技术相比,本技术方案存在如下有益效果:
15、本发明提供了一种无人机巡检安全管理方法、装置、计算机可读存储介质以及系统,通过对待巡检区域进行三维网格化电场建模,在三维电场模型中导入无人机模型,实时根据三维电场模型仿真计算无人机表面的电场强度最大值,并根据该电场强度最大值判断无人机飞行是否安全,该无人机巡检安全管理方法、装置、计算机可读存储介质以及系统提升了安全距离判断的准确性。
- 还没有人留言评论。精彩留言会获得点赞!