一种动态SLAM方法、装置、计算机设备以及存储介质
本技术属于机器人感知,特别涉及一种动态slam方法、装置、计算机设备以及存储介质。
背景技术:
1、slam(simultaneous localization and mapping,同步定位与地图绘制)是一种机器人感知技术,slam技术的核心是利用机器人的激光雷达、摄像头、gps等传感器数据建立环境地图,并实时估计机器人的位置,实现机器人的自主定位和导航。
2、在传统的slam方法中,大都只考虑了静态环境,但在实践中,许多移动障碍物等动态物体不可避免地对姿态估计引入了噪声影响,很大程度上影响了算法的鲁棒性和精确度。为了解决上述不足,在现有的一些slam方法使用了ransac等优化算法,将特征点区分为动态和静态两类,然而,当存在更多的动态特征时,无法准确的区分动态特征和静态特征,导致最终的slam精确度不高。
技术实现思路
1、本技术提供了一种动态slam方法、装置、计算机设备以及存储介质,旨在至少在一定程度上解决现有技术中的上述技术问题之一。
2、为了解决上述问题,本技术提供了如下技术方案:
3、一种动态slam方法,包括:
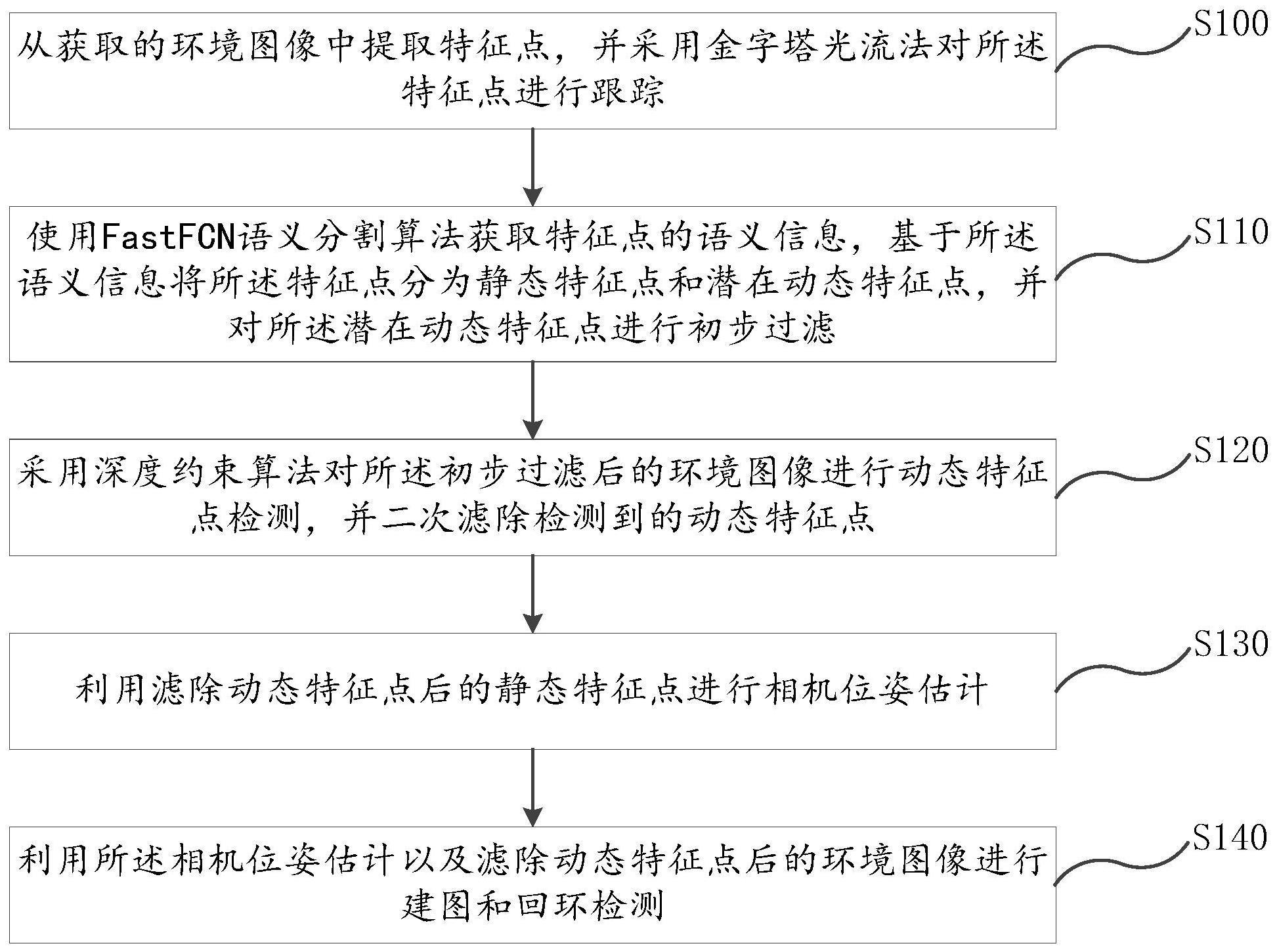
4、从获取的环境图像中提取特征点,并采用金字塔光流法对所述特征点进行跟踪;
5、使用fastfcn语义分割算法获取特征点的语义信息,基于所述语义信息将所述特征点分为静态特征点和潜在动态特征点,并对所述潜在动态特征点进行初步过滤;
6、采用深度约束算法对所述初步过滤后的环境图像进行动态特征点检测,并二次滤除检测到的动态特征点;
7、利用滤除动态特征点后的静态特征点进行相机位姿估计;
8、利用所述相机位姿估计以及滤除动态特征点后的环境图像进行建图和回环检测。
9、本技术实施例采取的技术方案还包括:所述从获取的环境图像中提取特征点之前,包括:
10、从图像传感器中获取环境图像,将所述环境图像融合为带有深度信息的单一图像。
11、本技术实施例采取的技术方案还包括:所述从获取的环境图像中提取特征点,并采用金字塔光流法对所述特征点进行跟踪具体为:
12、从所述单一图像的第一帧中,基于像素点与周围像素块之间的相关性构建harris角点,将所述harris角点作为特征点,并在随后的每一帧中,采用稀疏金字塔lucas-kanada光流法对所述特征点进行跟踪。
13、本技术实施例采取的技术方案还包括:所述采用稀疏金字塔lucas-kanada光流法对所述特征点进行跟踪具体为:
14、对于图像中第k帧上的一个点p(x,y),其在帧k′上相应的点为p′(x+dx,y+dy),像素点p(x,y)和点p′(x+dx,y+dy)之间的差值向量d(dx,dy)即为所需跟踪的光流;假设同一空间点的像素灰度值g在一个时间窗口内是固定的,即:
15、g′(x+dx,y+dy)=g(x,y)
16、光流误差为:
17、
18、
19、其中a是由四个偏导数dxx,dxy,dyx,dyy组成的特征矩阵,ω是点x的值域。
20、本技术实施例采取的技术方案还包括:所述使用fastfcn语义分割算法获取特征点的语义信息,基于所述语义信息将所述特征点分为静态特征点和潜在动态特征点具体为:
21、使用fastfcn语义分割算法对单一图像进行分割,将分割结果投影到单一图像上,获取特征点的语义信息;
22、基于所述语义信息对所述单一图像中的特征点进行分类,得到静态特征点和潜在动态特征点;
23、使用多视角几何约束算法对所述潜在动态特征点进行几何约束,对所述单一图像中的潜在动态特征点进行初步过滤;其中,所述使用多视角几何约束算法对所述潜在动态特征点进行几何约束具体为:
24、对于相机位姿估计前后的两帧c1和c2,f是c1到c2的基础矩阵,k是摄像机的内参矩阵,则c2上的极线l2表示为:
25、l2=fk(u,v,1)
26、利用点p到极线l2的距离d对所述潜在动态特征点进行几何约束:
27、d=||p-l2||2
28、本技术实施例采取的技术方案还包括:所述采用深度约束算法对所述初步过滤后的环境图像进行动态特征点检测,并二次滤除检测到的动态特征点具体为:
29、对于时间不同的两帧图像ft和ft1,通过追踪线程获取任一点于这两帧图像上的投影分别为pt和pt1,他们的深度分别为dt和dt1,通过slam系统获取相机的位置,通过f’上相机的位置计算出pt在图像帧f’上对应的投影点p′t1的深度d′t1:
30、
31、并计算两个深度的误差ep:
32、
33、如果dt1和d′t1之间的误差ep在设定的阈值范围之内,则认为点p是静态特征点并保留,反之,则认为点p是动态特征点并将其滤除。
34、本技术实施例采取的技术方案还包括:所述利用滤除动态特征点后的静态特征点进行相机位姿估计具体为:
35、采用卡尔曼滤波算法预测出动态区域中的可能静态特征点,并利用所述静态特征点以及可能静态特征点进行相机位姿估计:
36、t=argmin(∑||k-1txs-ps||2+φ∑||k-1txps-pps||2)
37、其中,xs是静态特征点的坐标,ps是xs相应的投影坐标,xps是通过卡尔曼滤波预测到的动态区域中的可能静态特征点的坐标,pps是xps相应的投影坐标,φ为权重参数。
38、本技术实施例采取的另一技术方案为:一种动态slam装置,包括:
39、特征点提取模块:用于从获取的环境图像中提取特征点,并采用金字塔光流法对所述特征点进行跟踪;
40、第一特征点过滤模块:用于使用fastfcn语义分割算法获取特征点的语义信息,基于所述语义信息将所述特征点分为静态特征点和潜在动态特征点,并对所述潜在动态特征点进行初步过滤;
41、第二特征点过滤模块:用于采用深度约束算法对所述初步过滤后的环境图像进行动态特征点检测,并二次滤除检测到的动态特征点;
42、相机位姿估计模块:用于利用滤除动态特征点后的静态特征点进行相机位姿估计;
43、建图模块:用于利用所述相机位姿估计以及滤除动态特征点后的环境图像进行建图和回环检测。
44、本技术实施例采取的又一技术方案为:一种计算机设备,所述计算机设备包括处理器、与所述处理器耦接的存储器,其中,
45、所述存储器存储有用于实现所述动态slam方法的程序指令;
46、所述处理器用于执行所述存储器存储的所述程序指令以控制动态slam。
47、本技术实施例采取的又一技术方案为:一种存储介质,存储有处理器可运行的程序指令,所述程序指令用于执行所述动态slam方法。
48、相对于现有技术,本技术实施例产生的有益效果在于:本技术实施例的动态slam方法、装置、计算机设备以及存储介质通过从视觉传感器中获取环境图像,采用harris角点和图像金字塔光流追踪技术对图像进行特征点提取及跟踪,并采用fastfcn语义分割、多视角几何约束以及深度约束相结合的动态约束算法对环境图像中的动态特征点进行检测及过滤,大大提高了动态特征点检测的精准度,避免了动态特征点对slam的干扰,同时尽可能的保留了静态特征点,可以得到最佳的相机位姿估计,从而有效地提升了slam系统的鲁棒性和精确度。
- 还没有人留言评论。精彩留言会获得点赞!