一种潮滩地图构建方法及系统
本发明属于潮滩信息处理,具体为一种潮滩地图构建方法及系统。
背景技术:
1、海洋存在着丰富的宝藏,为人类的发展和生活提供了不可或缺的条件。作为陆地与海洋连接之处的海岸带,也是海洋极为重要的部分之一。潮滩作为海岸带中十分典型的地貌类型,其区域指平均大潮低潮线至平均大潮高潮线之间的地带。
2、潮滩地形地貌的变化短时间内会对盐沼植被扩展与繁殖造成直接影响,进一步直接影响盐沼湿地恢复能力与保护效果。然而现存的获取潮滩地貌地形数据时间跨度过大,通常反应几年到几十年时间跨度的潮滩变化。现存的技术主要集中在使用较大的时空尺度变化对潮滩地貌地形变化分析,不足在微小尺度下对潮滩地形地貌进行分析。
3、一般使用插钎法、水准仪或全站仪测量等方法对河口海岸潮滩地形进行观测。但是传统的方法无法有效的解决潮滩滩面宽广、潮沟纵横、滩上植被发育、滩面质地松软等问题,尤其无法满足微小尺度下对潮滩地形地貌的研究需求。虽然遥感技术已经能够反演潮滩地形,但是由于光线影响和垂直视角的缘故,无法满足还原潮滩地表地形数据的精度要求。
技术实现思路
1、发明目的:为解决现有技术无法满足还原潮滩地表地形数据的精度要求的问题,本发明提出了一种潮滩地图构建方法及系统。
2、技术方案:一种潮滩地图构建方法,包括以下步骤:
3、步骤1:获取潮滩某一位置的图像信息和激光信息;
4、步骤2:将获取到的图像信息和激光信息进行融合,得到融合后的激光信息;
5、步骤3:根据获取潮滩某一位置的图像信息和激光信息的机构的位姿信息和融合后的激光信息,进行slam建图,得到潮滩地图。
6、进一步的,所述步骤2具体操作包括:
7、所述图像信息包括深度图像;
8、设深度图像中任意一点坐标为mi(xi,yi,zi),按照下式将mi(xi,yi,zi)变换到激光信息所在的坐标系下的坐标mi=(θi,di):
9、
10、式中,θi表示为激光雷达信息的角度,di表示伪激光雷达信息的距离;
11、用数组表示第n个模拟激光数据;其中,
12、
13、式中,θmin表示深度相机的最小观测角度,θmax表示深度相机的最大观测角度,n为模拟激光数据的总量;
14、将模拟激光数据与(θmin,θmax)范围内的激光信息进行信息融合,得到融合后的激光信息;所述激光信息为当前激光发射角度和该发射角度对应的最小距离。
15、进一步的,所述获取潮滩某一位置的图像信息和激光信息的机构的位姿信息,按照以下步骤得到:
16、采集获取潮滩某一位置的图像信息和激光信息的机构的速度、加速度和角速度;
17、定义加速度值为ax、ay、az,对加速度进行归一化,表示为:
18、
19、
20、
21、利用四元数表示从物体系变换到地理系的姿态变化矩阵,提取姿态变化矩阵中的重力分量vx、vy、vz,表示为:
22、
23、按照式(5)求解姿态误差:
24、
25、其中,ex、ey、ez为姿态误差向量对应的x、y、z的三个元素;
26、定义角速度值为gx、gy、gz,采用互补滤波修正角速度值:
27、
28、其中,kp为互补滤波系数,accex、accey、accez为实测得到的角速度,ωx、ωy、ωz为修正后的角速度;
29、按照下式更新四元数:
30、
31、其中ωx、ωy、ωz为修正后的角速度,δt为周期时间;
32、利用更新后的四元数表示姿态变化矩阵,并令姿态变化矩阵和旋转矩阵相等,计算得到:
33、
34、其中,为滚转角,θ为俯仰角,ψ为偏航角;
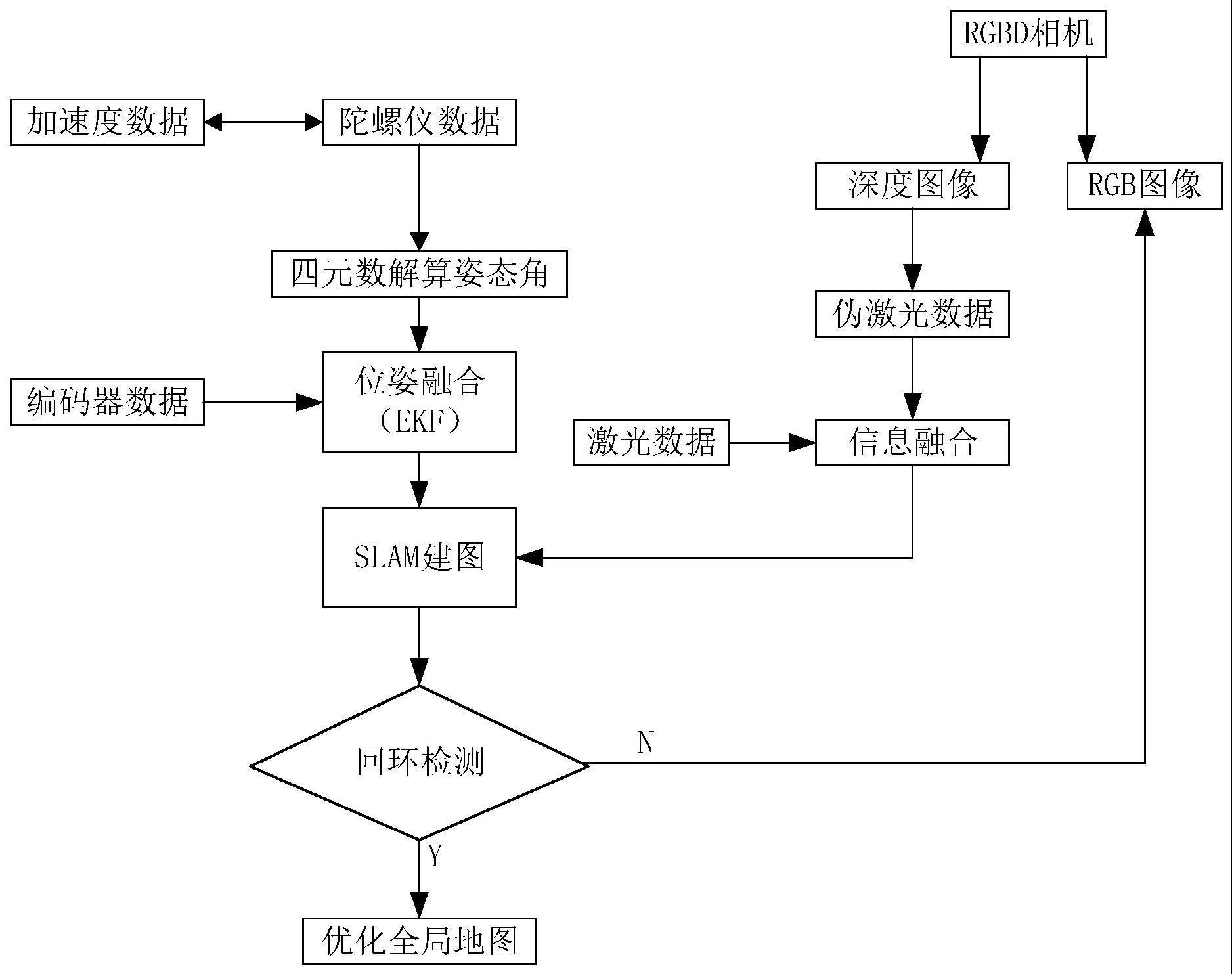
35、基于扩展卡尔曼滤波,对滚转角俯仰角θ、偏航角ψ和速度进行融合,得到位姿信息。
36、进一步的,所述图像信息包括rgb图像;所述步骤3具体操作包括:
37、s310:根据位姿信息和融合后的激光信息进行slam建图,得到初步全局地图,从初步全局地图中提取视觉特征点;
38、s320:从rgb图像中采集关键帧;
39、s330:从关键帧中提取视觉特征点;
40、s340:通过关键帧图像中的视觉特征点与一帧图像中的视觉特征点之间的相似度,判断是否存在视觉回环;若存在视觉回环,则执行s350;若不存在视觉回环,则更新关键帧,并执行s330;
41、s350:根据激光信息,判断是否存在激光回环,若存在激光回环,则构建回环检测地图,若不存在激光回环,则更新关键帧,并执行s330。
42、本发明还公开了一种潮滩地图构建系统,包括:
43、潮滩机器人,用于向数据处理模块提供潮滩某一位置的图像信息和激光信息,以及向数据处理模块提供自身的速度、加速度和角速度;
44、数据处理模块,用于将获取到的图像信息和激光信息进行融合,得到融合后的激光信息,以及用于根据潮滩机器人的速度、加速度和角速度,得到潮滩机器人的位姿信息;
45、slam建图模块,用于根据潮滩机器人的位姿信息和融合后的激光信息,进行slam建图,得到潮滩地图。
46、进一步的,所述图像信息包括深度信息和rgb图像。
47、进一步的,数据处理模块中,按照以下数据处理算法得到融合后的激光信息:
48、设深度图像中任意一点坐标为mi(xi,yi,zi),按照下式将mi(xi,yi,zi)变换到激光信息所在的坐标系下的坐标mi=(θi,di):
49、
50、式中,θi表示为激光雷达信息的角度,di表示伪激光雷达信息的距离;
51、用数组表示第n个模拟激光数据;其中,
52、
53、式中,θmin表示深度相机的最小观测角度,θmax表示深度相机的最大观测角度,n为模拟激光数据的总量;
54、将模拟激光数据与(θmin,θmax)范围内的激光信息进行信息融合,得到融合后的激光信息;所述激光信息为当前激光发射角度和该发射角度对应的最小距离。
55、进一步的,数据处理模块中,按照以下数据处理算法得到位姿信息:
56、采集获取潮滩某一位置的图像信息和激光信息的机构的速度、加速度和角速度;
57、定义加速度值为ax、ay、az,对加速度进行归一化,表示为:
58、
59、
60、
61、利用四元数表示从物体系变换到地理系的姿态变化矩阵,提取姿态变化矩阵中的重力分量vx、vy、vz,表示为:
62、
63、按照式(5)求解姿态误差:
64、
65、其中,ex、ey、ez为姿态误差向量对应的x、y、z的三个元素;
66、定义角速度值为gx、gy、gz,采用互补滤波修正角速度值:
67、
68、其中,kp为互补滤波系数,accex、accey、accez为实测得到的角速度,ωx、ωy、ωz为修正后的角速度;
69、按照下式更新四元数:
70、
71、其中,δt为周期时间;
72、利用更新后的四元数表示姿态变化矩阵,并令姿态变化矩阵和旋转矩阵相等,计算得到:
73、
74、其中,为滚转角,θ为俯仰角,ψ为偏航角;
75、基于扩展卡尔曼滤波,对滚转角俯仰角θ、偏航角ψ和速度进行融合,得到位姿信息。
76、9、根据权利要求6所述的一种潮滩地图构建系统,其特征在于:slam建图模块中按照以下步骤进行slam建图,得到潮滩地图:
77、s310:根据位姿信息和融合后的激光信息进行slam建图,得到初步全局地图,从初步全局地图中提取视觉特征点;
78、s320:从rgb图像中采集关键帧;
79、s330:从关键帧中提取视觉特征点;
80、s340:通过关键帧图像中的视觉特征点与一帧图像中的视觉特征点之间的相似度,判断是否存在视觉回环;若存在视觉回环,则执行s350;若不存在视觉回环,则更新关键帧,并执行s330;
81、s350:根据激光信息,判断是否存在激光回环,若存在激光回环,则构建回环检测地图,若不存在激光回环,则更新关键帧,并执行s330。
82、有益效果:本发明与现有技术相比,具有以下优点:
83、(1)本发明采取深度图像和激光信息结合的方式,弥补了激光雷达只能扫描平面的信息不足的缺点,减少了激光雷达遇到相似的三维结构回环检测匹配错误的情况,大大提高了机器人建图的精度和定位效果;
84、(2)本发明通过远程控制机器人进行信息采集,具有减少人工采集信息的劳动力、提高获得潮滩各种数据的效率、提升潮滩无人系统的智能化程度等优点;相对于从较大尺度范围获取潮滩特性及其变化规律的方法,本发明能够获取的细节信息更加丰富和多样化。
- 还没有人留言评论。精彩留言会获得点赞!