一种玩具的智能制造方法及系统与流程
本发明属于数字建模、数据处理优化的领域,具体涉及一种玩具的智能制造方法及系统。
背景技术:
1、随着科技的不断进步,智能制造技术也越来越成熟。在制造玩具等消费品时,如何快速、高效、精准地制造良好的产品是制造企业面临的挑战之一。传统的生产工艺需要耗费大量人力、物力和时间成本来进行初次手稿实验品的雕塑,后续对实验品雕塑的重复生产还存在精度不高、质量不稳定等问题。由此可见,智能制造技术的应用重点是落在高效地对产品进行数字化的三维建模这一方面,而且三维模型的色彩需要既逼真而又稳定,方能够有效提高产品品质和生产效率,优化生产流程,降低成本和风险。在玩具的制造过程中,三维模型的制作是必不可少的一环。传统的三维模型制作方法需要通过手工绘制或使用特定软件进行建模,速度慢,而且容易出现误差。尽管在公开号为cn110913217b的专利文献中提供了一种用于基于三维色彩映射模型参数优化的系统和方法,然而这种方法并不能适用于的实际的玩具生产数字建模中,在获取了玩具的三维数据后,如何快速准确地提取色彩信息却是存在挑战的。因为在不同的三维模型上,同一坐标处的像素值可能会存在差异,影响所提取的色彩信息的准确性和稳定性。
技术实现思路
1、本发明的目的在于提出一种玩具的智能制造方法及系统,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、本发明提供了一种玩具的智能制造方法及系统,获取玩具的多个三维模型,每个三维模型上的各点还包含三维坐标、反射率、表面单位法向量以及像素值,各个三维模型上三维坐标相同的点对应所述玩具上相同的位置,根据三维模型上各点的反射率和表面单位法向量,在所述玩具的多个三维模型上对模型的色彩进行优化,输出优化后的三维模型。
3、为了实现上述目的,根据本发明的一方面,提供一种玩具的智能制造方法,所述方法所述一种玩具的智能制造方法方法为用于优化玩具的三维模型上的色彩的方法,所述方法包括以下步骤:
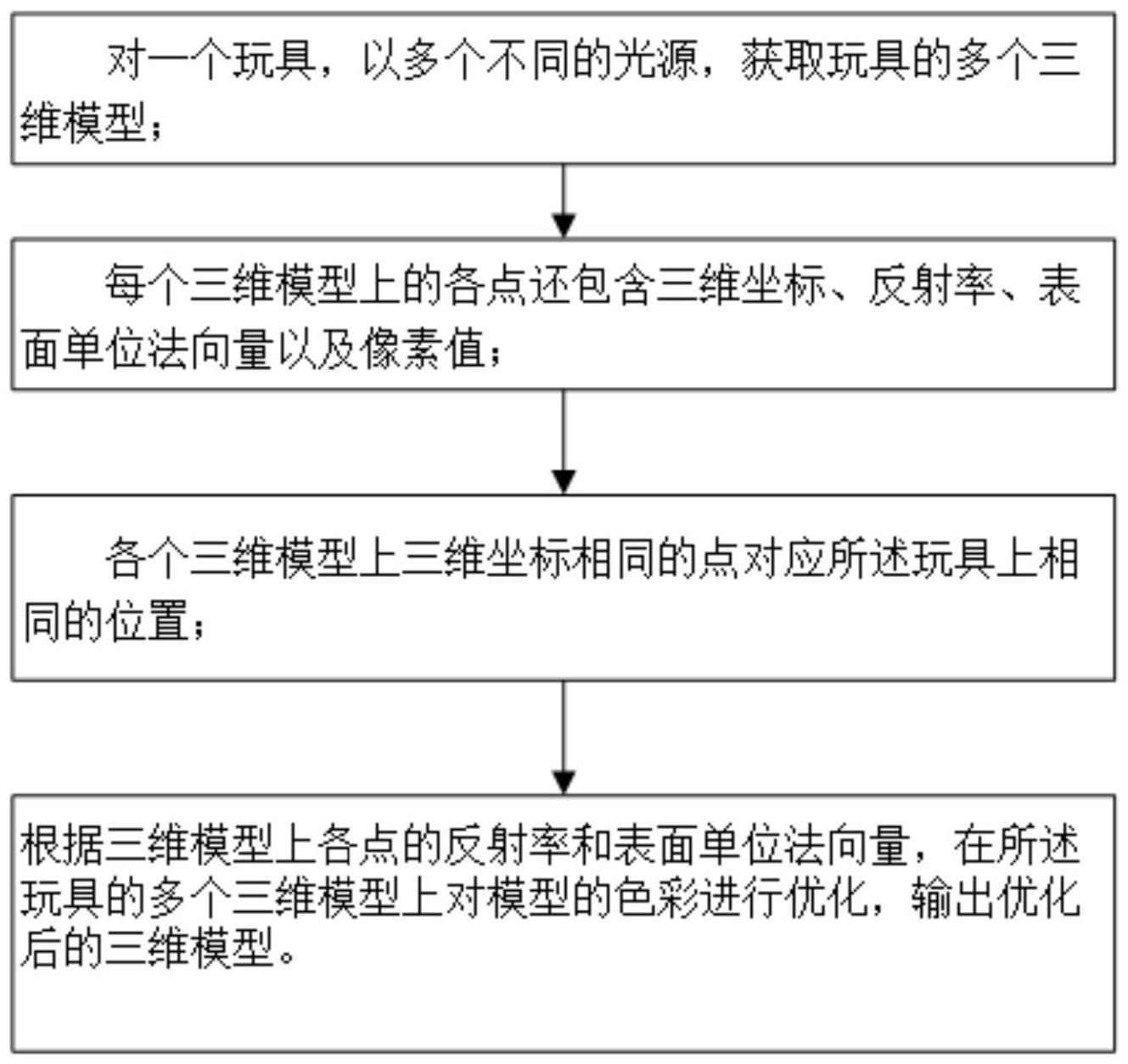
4、对一个玩具,以多个不同的光源,获取玩具的多个三维模型;
5、每个三维模型上的各点还包含三维坐标、反射率、表面单位法向量以及像素值;
6、各个三维模型上三维坐标相同的点对应所述玩具上相同的位置;
7、根据三维模型上各点的反射率和表面单位法向量,在所述玩具的多个三维模型上对模型的色彩进行优化,输出优化后的三维模型。
8、进一步地,对一个玩具,以多个不同的光源,获取玩具的多个三维模型,具体方法为:
9、以所述玩具为三维建模的目标,所述多个不同的光源表示以同样的灯分别于多个不同的位置每个位置轮流地对所述玩具进行照明由此得到多个不同位置的光照的来源,以多个不同位置的光照的来源分别对所述玩具通过光度立体法进行三维建模,从而得到玩具的多个三维模型,其中各个三维模型分别对应一个光源。
10、进一步地,所述三维模型由多个不同的点构成,三维模型中的点由三维坐标的数值、反射率的数值、表面单位法向量以及像素值所构成,其中所述表面单位法向量为对应的三维模型中的点在三维模型的表面上的单位法向量,所述表面单位法向量为通过光度立体法进行三维建模所得;
11、其中,在对目标通过光度立体法进行三维建模的过程中,会获取到目标物体表面的三维坐标、反射率、表面单位法向量以及像素值等数值,详细可参考文献:[1]basri r,jacobs d w,kemelmacher i.photometric stereo with general,unknown lighting[j].international journal of computer vision,2007,72(3):239-257.;[2]collins t,bartoli a.3d reconstruction in laparoscopy with close-range photometricstereo[j].springer,berlin,heidelberg,2012.;[3]马泳潮.基于彩色光度立体法的非刚性体三维数字化研究[d].陕西科技大学,2016.;[4]林慕清.基于光度立体法的三维重建技术的研究与实现[d].东北大学;
12、其中,反射率的数值为属于(0,1)中的小数,所述像素值为原始的像素的rgb数值经过灰度化与归一化后通过softmax算法等进行映射为属于(0,1)中的小数。
13、进一步地,所述三维模型上三维坐标相同的点表示各个三维模型之间皆存在三维坐标数值相同的点,所述三维模型上三维坐标相同的点皆对应所述玩具上相同的一个位置。
14、进一步地,根据三维模型上各点的反射率和表面单位法向量,在所述玩具的多个三维模型上对模型的色彩进行优化的方法为:
15、将所述玩具的多个三维模型组成的集合记为toyset,toyset中作为元素的三维模型的数量记为n,toyset中元素的序号为i,且i属于1到n的取值范围,toyset中作为序号为i的元素的三维模型记作toy(i);
16、toyset中各三维模型包含的点的数量皆相同,toy(i)中包含的点的数量记为m,toy(i)中包含的点的序号为j,且j属于1到m的取值范围,toy(i)中序号为j的点toy(i,j)包含其三维坐标pos[i,j]、反射率ref[i,j]、表面单位法向量vec[i,j]以及像素值pix[i,j];
17、对于toyset包含的各三维模型中的各点,若两个分别属于不同的三维模型的点,分别在其所述三维模型中拥有着数值相同的序号j,则所述两个分别属于不同的三维模型的点拥有数值相同的三维坐标(即例如,toyset中作为序号为1的元素的三维模型记作toy(1),toyset中作为序号为2的元素的三维模型记作toy(2),toy(1)中序号j等于3的点跟toy(2)中序号j也等于3的点这两个点拥有数值相同的三维坐标);
18、由于光源位置的不同,对玩具的照射方位以及玩具的表面进行反射的部分和角度也有不同,造成了相同三维坐标的点在不同的三维模型上可能会存在反射率、表面单位法向量以及像素值有不同的数值(可参考相关的研究:[5]陈鹏.三维场景光影效果控制与渲染的研究与实现[d].上海交通大学,2012.;[6]任浩然.动态光场采集与三维建模的关键技术研究[d].杭州电子科技大学,2014.),而计算三维模型上各点的光扰动值可以更好地计量光源对三维建模表面的数值的扰动的因素,以此有效地避免对玩具的建模的过程中光源位置对局部暗影造成的建模的失真;
19、计算三维模型上各点的光扰动值:
20、记toyset中序号为i的三维模型toy(i)中序号为j的点toy(i,j)对应的光扰动值为dfs[i,j],首先需要,根据各点包含的三维坐标pos[i,j]来分别将具有同样的三维坐标的点先统一选出来,分别获取toyset中除了所述toy(i)外的各三维模型中序号同样为所述j的各点,同时将序号同样为所述j的各点组成的集合作为所述点toy(i,j)的光扰动对比集set(i,j),所述光扰动对比集set(i,j)中元素的数量则为n-1个,(因为toyset中共有n个三维模型,除了所述toy(i)外的三维模型则有n减1个,)所述光扰动对比集set(i,j)中元素的序号为p(i,j),p(i,j)属于1到n-1,set(i,j)中序号为p(i,j)的元素为点toy(p(i,j)),分别获取点toy(p(i,j))包含的反射率ref[p(i,j)]、表面单位法向量vec[p(i,j)]以及像素值pix[p(i,j)],点toy(i,j)对应的光扰动值的计算公式为:
21、
22、其中,通过分别计算点toy(i,j)与其光扰动对比集中各点之间的反射率之比ref[p(i,j)]/ref[i,j]、表面单位法向量的相似度sim(vec[i,j],vec[p(i,j)])以及像素值之比pix[p(i,j)]/pix[i,j]的算术平均数,然后通过在1到n-1遍历p(i,j)计算toy(i,j)与其光扰动对比集中各点之间的反射率之比、表面单位法向量的相似度以及像素值之比的算术平均数进行累加求和最后除以n-1得到其平均值,反射率之比、表面单位法向量的相似度以及像素值之比的算术平均值有利于衡量光源的变化干扰在三维模型上的变化概率,从而有效地衡量了光源变换对三维建模的数据特征在数值分布上的影响因素,更好地帮助三维模型排除影响因素进行修正,函数avg表示计算里面各项数值的算术平均值,函数sim是通过kl散度或余弦相似度等相似度算法计算向量间的相似度的函数;
23、由此得到各三维模型上各点对应的光扰动值;
24、然后,在所述玩具的多个三维模型上进行色彩的优化。
25、其中,对于单位不同的物理量之间的数值上的计算,为了统一不同物理量在数值上的相关性,需要先进行无量纲化处理。
26、进一步地,在所述玩具的多个三维模型上进行色彩的优化的方法具体为:
27、将toyset中所有三维模型上的全部的点分别按照序号j进行分类分为m类,具体可为,将toyset中所有三维模型上的全部的点按照其三维坐标进行分类,因为序号j具体数值相同的点它们的三维坐标也是相同的,而j属于1到m,所以toyset中所有三维模型上的全部的点分别按照序号j进行分类被分成了m类,其中第j类包含了toyset中所有三维模型上的序号都为j的点,所述第j类包含的各点在该类中的排序对应所以toyset中各三维模型的序号i,第j类中包含的点都是对应了三维模型上相同的三维坐标;
28、根据toyset中各三维模型中各点的三维坐标,创建一个拥有与toyset中各三维模型中各点同样的三维坐标的三维模型作为优化三维模型,所述优化三维模型中包含的点的数量与toyset中各三维模型中包含的点的数量保持一致,所述优化三维模型中包含的点的序号与toyset中各三维模型中包含的点的序号保持一致,所述优化三维模型中包含的各点的三维坐标与toyset中各三维模型中包含的各点的三维坐标保持一致;
29、分别计算被分成的m类中的各类的点的光扰动值的算术平均数作为该类的光扰动标志量,再计算被分成的m类中的各类中的各个点的光扰动值与该类的光扰动标志量作差的绝对值(每个类里面的分别各个点的光扰动值与这个点所属的类的光扰动标志量之间相差数值的绝对值),进而分别选出被分成的m类中的各类的点的光扰动值与该类的光扰动标志量作差的绝对值数值最小的一个点作为该类的选用点(这样是为了有利于选出被光源的变化因素造成影响最小的点),即在第j类中与所述第j类的光扰动标志量相减之差绝对值最小的一个点为所述第j类的选用点(如此得到的选用点的像素值数据分布是更加稳定的,可以快速准确地提取色彩信息,有益于更加稳定的进行三维模型数据的提取,防止日后大规模生产时三维模型的颜色受光源因素影响而有所波动);
30、以所述第j类的选用点的像素值作为所述优化三维模型中序号为j的点对应的像素值,可优选地,可以将所述第j类的选用点的反射率和表面单位法向量用来作为所述优化三维模型中序号为j的点对应的反射率和表面单位法向量,然后,输出所述优化模型作为优化后的三维模型。
31、本发明还提供了一种玩具的智能制造系统,所述一种玩具的智能制造系统包括:处理器、存储器及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述一种玩具的智能制造方法中的步骤,所述一种玩具的智能制造系统可以运行于桌上型计算机、笔记本电脑、掌上电脑及云端数据中心等计算设备中,可运行的系统可包括,但不仅限于,处理器、存储器、服务器集群,所述处理器执行所述计算机程序运行在以下系统的单元中:
32、三维模型获取单元,用于获取玩具的多个三维模型;
33、数值获取单元,用于获取每个三维模型上的各点还包含三维坐标、反射率、表面单位法向量以及像素值;
34、数据对齐单元,用于将各个三维模型上三维坐标相同的点对应上所述玩具上相同的位置;
35、优化计算单元,用于根据三维模型上各点的反射率和表面单位法向量,在所述玩具的多个三维模型上对模型的色彩进行优化,输出优化后的三维模型。
36、本发明的有益效果为:本发明提供了一种玩具的智能制造方法及系统,获取玩具的多个三维模型,每个三维模型上的各点还包含三维坐标、反射率、表面单位法向量以及像素值,各个三维模型上三维坐标相同的点对应所述玩具上相同的位置,根据三维模型上各点的反射率和表面单位法向量,在所述玩具的多个三维模型上对模型的色彩进行优化,输出优化后的三维模型,有益于更加稳定的进行三维模型数据的提取。本发明的智能制造方法及系统,通过获取玩具的多个三维模型,并根据三维坐标、反射率、表面单位法向量和像素值等信息,在模型的不同区域进行优化,从而能够更加精准地提取色彩信息,可确保产品数字化建模提取的品质和生产效率的高效稳定。
- 还没有人留言评论。精彩留言会获得点赞!