一种车辆监测方法、系统及电子设备与流程
本技术涉及车辆监测领域,尤其涉及一种车辆监测方法、系统及电子设备。
背景技术:
1、目前,常用的相机标定方法主要为基于标定板的标定方法,其主要通过相机对标定板拍摄不同视角的图像,求解出单应性矩阵,进而求出相机内外参,完成相机的标定。
2、然而,采用这种方式必须通过标定板的辅助,无法适应路侧各种复杂的情况,如:在路口或高速路等路端,使用标定板进行路侧相机的标定具有一定的危险性。
技术实现思路
1、有鉴于此,本技术提供一种车辆监测方法、系统及电子设备,其具体方案如下:
2、一种车辆监测方法,包括:
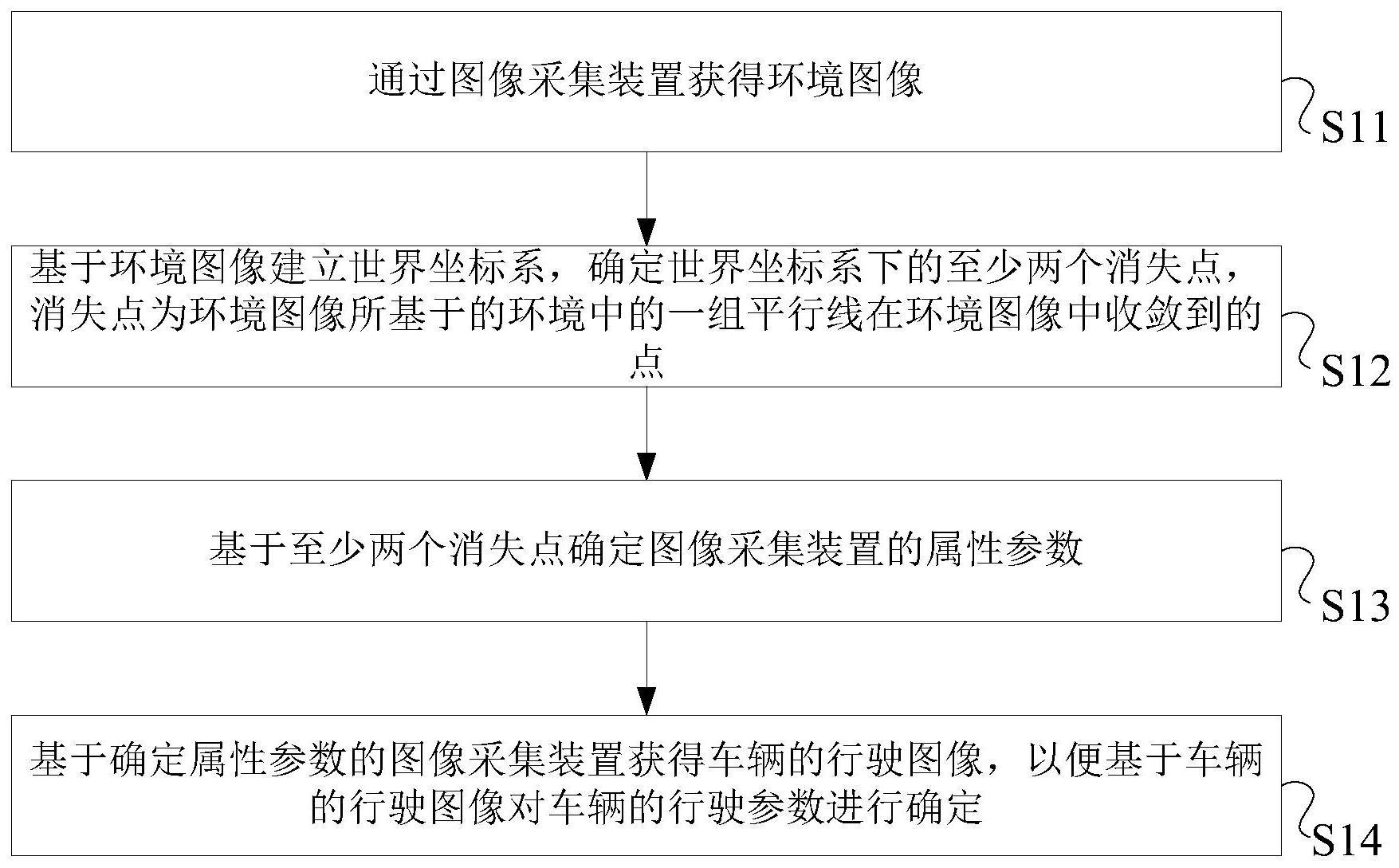
3、通过图像采集装置获得环境图像;
4、基于所述环境图像建立世界坐标系,确定所述世界坐标系下的至少两个消失点,所述消失点为所述环境图像所基于的环境中的一组平行线在所述环境图像中收敛到的点;
5、基于所述至少两个消失点确定所述图像采集装置的属性参数;
6、基于确定所述属性参数的所述图像采集装置获得车辆的行驶图像,以便基于所述车辆的行驶图像对所述车辆的行驶参数进行确定。
7、进一步的,所述基于所述环境图像建立世界坐标系,包括:
8、通过图像检测获得所述环境图像中至少两个互相垂直的标定线;
9、基于所述至少两个互相垂直的标定线建立世界坐标系。
10、进一步的,所述通过图像检测获得所述环境图像中至少两个互相垂直的标定线,包括:
11、通过图像检测获得所述环境图像中第一方向的原标定线,以及与所述第一方向垂直的第二方向的原标定线;
12、基于所述第一方向的原标定线以及第二方向的原标定线,确定第一方向的标定线以及与所述第一方向垂直的第二方向的标定线;
13、所述方法还包括以下至少一种:
14、通过图像检测,确定与所述第一方向的标定线平行的至少两个第一方向平行线,以及与所述第二方向的标定线平行的至少两个第二方向平行线;
15、通过图像检测,确定与第一方向的标定线平行的至少两个第一方向平行线;确定所述环境图像中行驶方向与所述第一方向平行的行驶车辆,基于所述环境图像中所述行驶车辆的车体结构确定与所述第一方向平行线垂直的第二方向平行线。
16、进一步的,所述确定所述世界坐标系下的至少两个消失点,包括:
17、基于所述至少两个第一方向平行线确定第一消失点,并基于所述至少两个第二方向平行线确定第二消失点;
18、其中,所述第一消失点及所述第二消失点在所述环境中位于水平面。
19、进一步的,所述基于所述至少两个第一方向平行线确定第一消失点,并基于所述至少两个第二方向平行线确定第二消失点,包括:
20、确定所述环境图像中所述至少两个第一方向平行线的交点为第一消失点;
21、确定所述环境图像中所述至少两个第二方向平行线的交点为第二消失点;
22、其中,交点位于所述环境图像的图像内,或者,所述交点未位于所述环境图像的图像内,是基于所述环境图像进行图像处理得到的。
23、进一步的,所述基于所述至少两个消失点确定所述图像采集装置的属性参数,包括:
24、获得所述至少两个消失点在所述世界坐标系的世界坐标及在图像坐标系的像素坐标;
25、基于所述至少两个消失点的世界坐标获得所述至少两个消失点的世界齐次坐标,基于所述至少两个消失点的像素坐标获得所述至少两个消失点的像素齐次坐标;
26、基于所述至少两个消失点的世界齐次坐标及像素齐次坐标确定所述图像采集装置的属性参数。
27、进一步的,所述基于所述至少两个消失点确定所述图像采集装置的属性参数,包括:
28、获得所述至少两个消失点中每个消失点在所述世界坐标系的世界坐标及在图像坐标系的像素坐标;
29、基于对第一消失点的所述世界坐标与像素坐标的第一对应关系的调整,建立调整后的第一对应关系与所述图像采集装置的第一旋转向量之间的第一关系,基于对第二消失点的所述世界坐标与像素坐标的第二对应关系的调整,建立调整后的第二对应关系与所述图像采集装置的第二旋转向量之间的第二关系;
30、获得预先设定的所述图像采集装置的第一旋转向量及第二旋转向量的数值,以及所述第一旋转向量与所述第二旋转向量之间的第三关系;
31、基于所述第一旋转向量及第二旋转向量的数值,以及所述第一关系、第二关系及第三关系确定所述图像采集装置的属性参数中的内参;
32、其中,所述消失点的世界坐标与像素坐标的对应关系至少包括所述图像采集装置的内参与所述消失点的坐标之间的对应关系。
33、进一步的,所述基于所述至少两个消失点确定所述图像采集装置的属性参数,包括:
34、基于所述第一旋转向量及所述第二旋转向量确定第三旋转向量,通过所述第一旋转向量、第二旋转向量及所述第三旋转向量构成所述图像采集装置的旋转矩阵;
35、确定世界坐标系原点的世界坐标与像素坐标的第三对应关系;
36、基于所述图像采集装置在所述世界坐标系中的位置确定第一特定点,或,基于所述环境中车辆的行车道宽度确定第二特定点;确定第一特定点或第二特定点的世界坐标与图像坐标的第四对应关系;
37、基于所述第三对应关系及第四对应关系确定所述图像采集装置的位移向量;
38、基于所述旋转矩阵及位移向量确定所述图像采集装置的外参;其中,所述特定点的世界坐标与像素坐标的对应关系至少包括所述图像采集装置的外参与所述特定点的坐标之间的对应关系。
39、一种车辆监测系统,包括:
40、获得单元,用于通过图像采集装置获得环境图像;
41、第一确定单元,用于基于所述环境图像建立世界坐标系,确定所述世界坐标系下的至少两个消失点,所述消失点为所述环境图像所基于的环境中的一组平行线在所述环境图像中收敛到的点;
42、第二确定单元,用于基于所述至少两个消失点确定所述图像采集装置的属性参数;
43、第三确定单元,用于基于确定的所述属性参数的所述图像采集装置获得车辆的行驶图像,以便基于所述车辆的行驶图像对所述车辆的行驶参数进行确定。
44、一种电子设备,包括:
45、图像采集装置,用于获得环境图像及车辆的行驶图像;
46、处理器,用于基于所述环境图像建立世界坐标系,确定所述世界坐标系下的至少两个消失点,所述消失点为所述环境图像所基于的环境中的一组平行线在所述环境图像中收敛到的点;基于所述至少两个消失点确定所述图像采集装置的属性参数;基于确定所述属性参数的所述图像采集装置获得车辆的行驶图像,以便基于所述车辆的行驶图像对所述车辆的行驶参数进行确定。
47、从上述技术方案可以看出,本技术公开的车辆监测方法、系统及电子设备,通过图像采集装置获得环境图像;基于环境图像建立世界坐标系,确定世界坐标系下的至少两个消失点,消失点为环境图像所基于的环境中的一组平行线在环境图像中收敛到的点;基于至少两个消失点确定图像采集装置的属性参数;基于确定属性参数的图像采集装置获得车辆的行驶图像,以便基于车辆的行驶图像对车辆的行驶参数进行确定。
- 还没有人留言评论。精彩留言会获得点赞!