一种退水闸流量自动监测报警方法及系统与流程
本发明涉及流量监测报警,具体涉及一种退水闸流量自动监测报警方法及系统。
背景技术:
1、退水闸流量是单位时间内流过退水闸某一横断面的水量,目前对退水闸流量的监测主要采用多种流量在线监测方法,主要包括水平式adcp测流、非接触式雷达波测流和超声波时差发测流等,这些流量在线监测方法不仅操作负责,且每次观测历时较长,工作量大,需要花费较大人力物理,加之退水闸水流有时变化十分剧烈,仅依靠以上监测方法难易全面掌握江河流量。
2、现有流量监测方法中,还有运用影像识别技术实现对河道流量的在线监测,如文献《基于ai智能影像识别技术的流量实时在线监测集成与应用》(水利水电快报2021年9月第42卷第9期)提及,利用图像传感器替代人眼获取水尺图像测量水位,但该文献将所采集的拍摄图像直接进行图像数据处理,通过载入的边界条件自动校验有效数据,然后生成水位线读数、水位、断面平均流速、最大表面流速等信息。而在实际运用中,河面上往往容易存在水雾,对所拍摄的图像容易造成图像不清晰等问题,对流速的计算结果有较大影响,进而会降低对河道流量的监测效果。
技术实现思路
1、针对现有技术中的缺陷,本发明提供一种退水闸流量自动监测报警方法及系统。
2、第一方面,一种退水闸流量自动监测报警方法,包括:
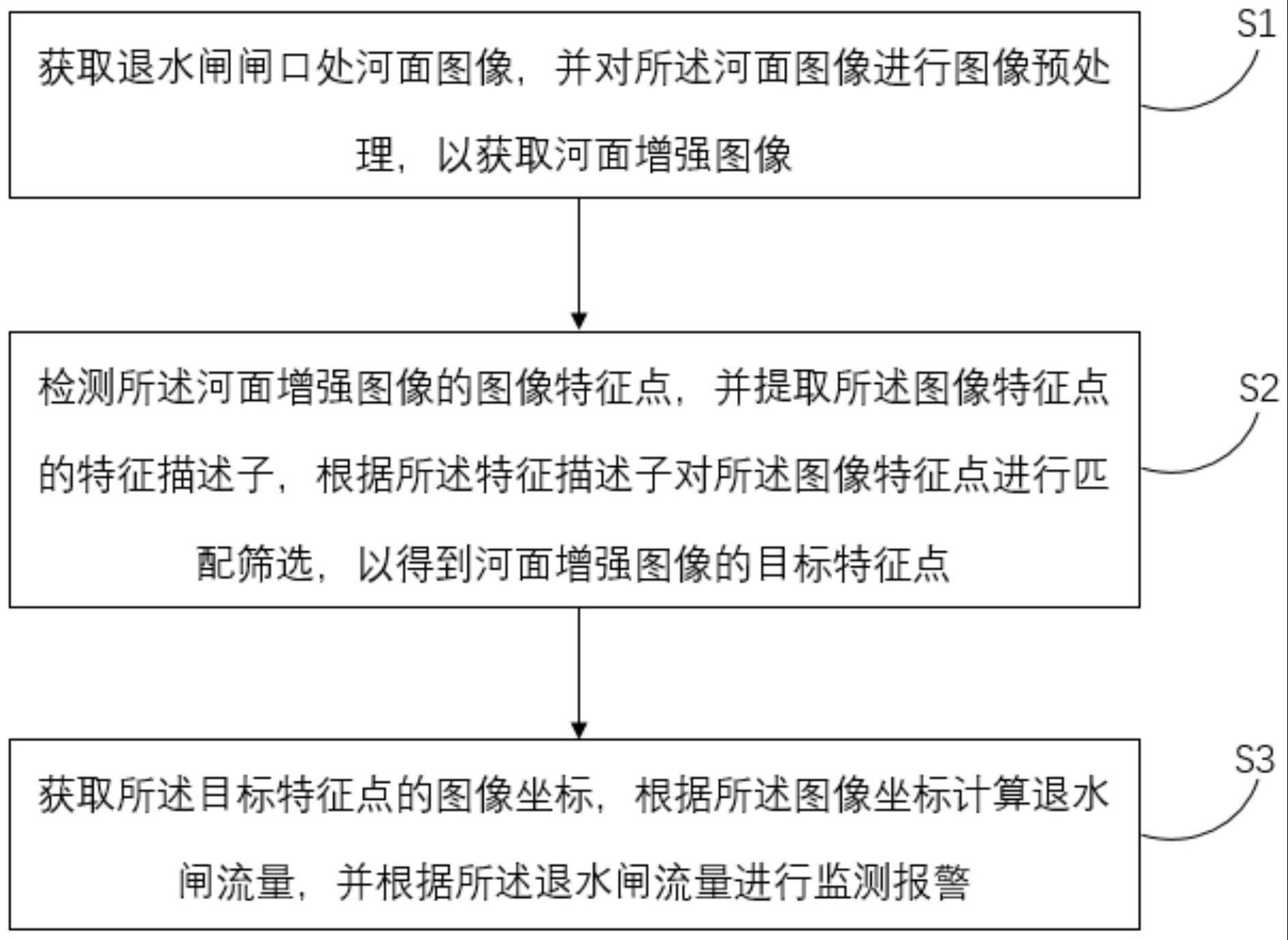
3、获取退水闸闸口处河面图像,并对所述河面图像进行图像预处理,以获取河面增强图像;
4、检测所述河面增强图像的图像特征点,并提取所述图像特征点的特征描述子,根据所述特征描述子对所述图像特征点进行匹配筛选,以得到河面增强图像的目标特征点;
5、获取所述目标特征点的图像坐标,根据所述图像坐标计算退水闸流量,并根据所述退水闸流量进行监测报警。
6、进一步地,所述获取退水闸闸口处河面图像,并对所述河面图像进行图像预处理,以获取河面增强图像,具体为:
7、由预先安装的拍摄装置采集退水闸闸口处河面图像,所述拍摄装置安装于退水闸闸口顶部;
8、检测所述河面图像的像素点,根据所述像素点获取图像光矢量;
9、根据所述图像光矢量获取光值调节图,并基于所述光值调节图计算图像修正参数;
10、根据所述图像修正参数对所述河面图像进行像素修正,并得到像素透射率;
11、根据所述图像光矢量和像素透射率对所述河面图像进行去雾处理和图像增强,得到河面增强图像。
12、进一步地,所述检测所述河面增强图像的图像特征点,并提取所述图像特征点的特征描述子,根据所述特征描述子对所述图像特征点进行匹配筛选,以得到河面增强图像的目标特征点,具体为:
13、获取相邻两帧河面增强图像,对所述相邻两帧河面增强图像进行特征点检测,以获取图像特征点,所述图像特征点包括河面增强图像中显著目标物所形成的角点;
14、提取所述图像特征点的特征描述子,根据所述特征描述子对所提取的相邻两帧图像特征点进行特征匹配,得到特征匹配点及对应的特征匹配度;
15、根据所述特征匹配度对所述特征匹配点进行筛选,以获取河面增强图像的目标特征点;
16、所述显著目标物包括但不限于河面增强图像上的漂浮物、气泡以及水波纹。
17、进一步地,所述根据所述特征匹配度对所述特征匹配点进行筛选,以获取河面增强图像的目标特征点,具体为:
18、将所述特征匹配度从高到低进行排序,并提取匹配度高的前n个特征匹配点;
19、根据所述匹配度高的前n个特征匹配点,分别计算每对所述特征匹配点之间的连线斜率,并将所述连线斜率从低到高进行排序,提取连线斜率小的前m个特征匹配点;
20、根据所述连线斜率小的前m个特征匹配点,分别计算每对所述特征匹配点之间的欧式距离,根据所述欧式距离对特征匹配点进行聚类;
21、根据聚类结果获取点数最多的目标类,将目标类中的特征匹配点作为目标特征点。
22、进一步地,所述获取所述目标特征点的图像坐标,根据所述图像坐标计算退水闸流量,并根据所述退水闸流量进行监测报警,具体为:
23、识别相邻两帧河面增强图像中所述目标特征点的特征坐标,并将所述特征坐标进行坐标转换,以获取图像坐标;
24、根据所述图像坐标计算相邻两帧河面增强图像中目标特征点之间的相对距离和图像时间差;
25、根据所述相对距离和图像时间差计算退水闸流量,并对所述退水闸流量进行实时监测;
26、当所述退水闸流量超过预设的报警阈值时,发出流量报警信号。
27、第二方面,一种退水闸流量自动监测报警系统,包括:
28、预处理模块:用于获取退水闸闸口处河面图像,并对所述河面图像进行图像预处理,以获取河面增强图像;
29、特征提取模块:用于检测所述河面增强图像的图像特征点,并提取所述图像特征点的特征描述子,根据所述特征描述子对所述图像特征点进行匹配筛选,以得到河面增强图像的目标特征点;
30、流量监测模块:用于获取所述目标特征点的图像坐标,根据所述图像坐标计算退水闸流量,并根据所述退水闸流量进行监测报警。
31、进一步地,所述预处理模块具体用于:
32、由预先安装的拍摄装置采集退水闸闸口处河面图像,所述拍摄装置安装于退水闸闸口顶部;
33、检测所述河面图像的像素点,根据所述像素点获取图像光矢量;
34、根据所述图像光矢量获取光值调节图,并基于所述光值调节图计算图像修正参数;
35、根据所述图像修正参数对所述河面图像进行像素修正,并得到像素透射率;
36、根据所述图像光矢量和像素透射率对所述河面图像进行去雾处理和图像增强,得到河面增强图像。
37、进一步地,所述特征提取模块具体用于:
38、获取相邻两帧河面增强图像,对所述相邻两帧河面增强图像进行特征点检测,以获取图像特征点,所述图像特征点包括河面增强图像中显著目标物所形成的角点;
39、提取所述图像特征点的特征描述子,根据所述特征描述子对所提取的相邻两帧图像特征点进行特征匹配,得到特征匹配点及对应的特征匹配度;
40、根据所述特征匹配度对所述特征匹配点进行筛选,以获取河面增强图像的目标特征点;
41、所述显著目标物包括但不限于河面增强图像上的漂浮物、气泡以及水波纹。
42、进一步地,所述根据所述特征匹配度对所述特征匹配点进行筛选,以获取河面增强图像的目标特征点,具体为:
43、将所述特征匹配度从高到低进行排序,并提取匹配度高的前n个特征匹配点;
44、根据所述匹配度高的前n个特征匹配点,分别计算每对所述特征匹配点之间的连线斜率,并将所述连线斜率从低到高进行排序,提取连线斜率小的前m个特征匹配点;
45、根据所述连线斜率小的前m个特征匹配点,分别计算每对所述特征匹配点之间的欧式距离,根据所述欧式距离对特征匹配点进行聚类;
46、根据聚类结果获取点数最多的目标类,将目标类中的特征匹配点作为目标特征点。
47、进一步地,所述流量监测模块具体用于:
48、识别相邻两帧河面增强图像中所述目标特征点的特征坐标,并将所述特征坐标进行坐标转换,以获取图像坐标;
49、根据所述图像坐标计算相邻两帧河面增强图像中目标特征点之间的相对距离和图像时间差;
50、根据所述相对距离和图像时间差计算退水闸流量,并对所述退水闸流量进行实时监测;
51、当所述退水闸流量超过预设的报警阈值时,发出流量报警信号。
52、本发明的有益效果体现在:通过获取退水闸闸口处河面图像并对河面图像进行去雾处理和图像增强,得到河面增强图像,使后续用于水流量计算的河面图像更加接近真实的无雾图像,提高流量计算准确性;基于河面增强图像对退水闸闸口处河面进行特征点识别,并利用特征描述子进行特征点匹配和筛选,以筛选得到对流速计算影响较小的目标特征点,进而根据目标特征点计算退水闸流量,实现对退水闸流量的监测和报警,提高监测效果。
- 还没有人留言评论。精彩留言会获得点赞!