本发明涉及数据处理,特别涉及一种基于四维数据集的气象网格和航迹网格叠加方法。
背景技术:
1、航空器,是指一种能够在大气中飞行的飞行器,主要包括飞机,且在飞机飞行过程中,对飞机影响最大的当属气象条件,许多气象条件严重威胁着飞行安全,并截止目前,世界各地的气象设施都可以探测到诸如气温、风、云、降水、雷电等一系列气象因素,可以为飞行提供有效数据支撑。
2、因此,本发明提出一种基于四维数据集的气象网格和航迹网格叠加方法。
技术实现思路
1、本发明提供一种基于四维数据集的气象网格和航迹网格叠加方法,用以通过从四个维度构建空间网格,并结合天气预报数据与航空器探测资料,进行网格叠加处理,来实现有效飞行提醒,保证了飞行安全性。
2、本发明提供一种基于四维数据集的气象网格和航迹网格叠加方法,包括:
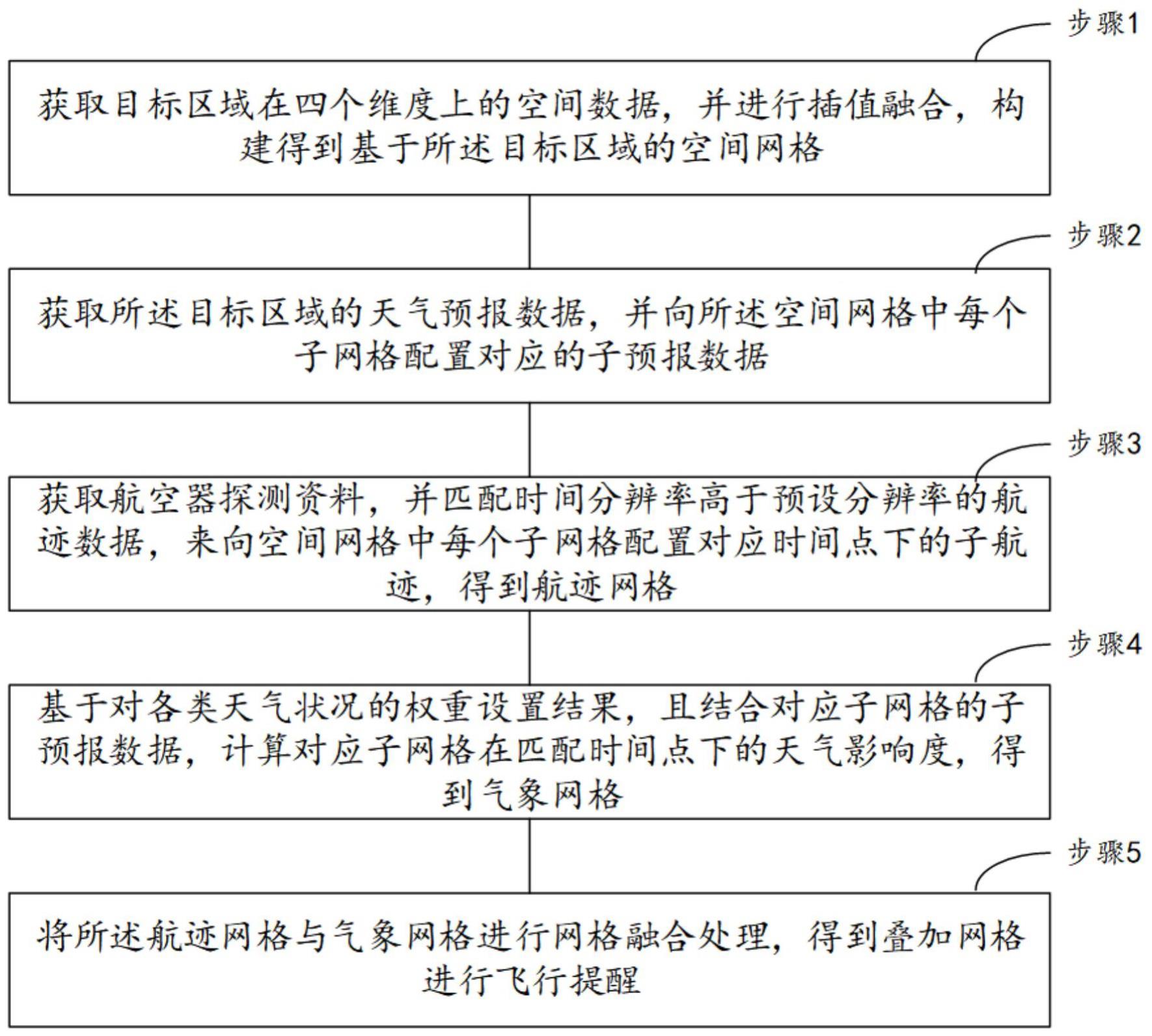
3、步骤1:获取目标区域在四个维度上的空间数据,并进行插值融合,构建得到基于所述目标区域的空间网格,其中,所述四个维度为经度、维度、高度以及时间;
4、步骤2:获取所述目标区域的天气预报数据,并向所述空间网格中每个子网格配置对应的子预报数据;
5、步骤3:获取航空器探测资料,并匹配时间分辨率高于预设分辨率的航迹数据,来向空间网格中每个子网格配置对应时间点下的子航迹,得到航迹网格;
6、步骤4:基于对各类天气状况的权重设置结果,且结合对应子网格的子预报数据,计算对应子网格在匹配时间点下的天气影响度,得到气象网格;
7、步骤5:将所述航迹网格与气象网格进行网格融合处理,得到叠加网格进行飞行提醒。
8、优选的,获取目标区域在四个维度上的空间数据,并进行插值融合,构建得到基于所述目标区域的空间网格,包括:
9、获取所述目标区域基于空间上的纬度边界、经度边界以及高度边界;
10、基于所述纬度边界、经度边界以及高度边界,构建第一空间;
11、对所述第一空间进行单元划分,获取得到若干单元子网格;
12、根据对应单元子网格的网格边界信息,进行信息插值融合,构建得到空间网格。
13、优选的,获取所述目标区域的天气预报数据,并向所述空间网格中每个子网格配置对应的子预报数据,包括:
14、根据所述目标区域所部署的气象站,确定每个气象站的监测范围,并将所述监测范围与所述子网格进行范围匹配,向每个子网格配置气象范围标签;
15、当所述子网格的气象范围标签为一个时,保留对应子网格的网格大小不变,并从天气预报数据中调取与对应气象范围标签一致的气象站的第一气象数据作为子预报数据;
16、当所述子网格的气象范围标签为多个时,获取每个气象范围标签对应气象站的范围边界线,并与对应子网格进行位置匹配处理,附加在对应子网格上;
17、基于附加结果,得到第一划分格,并判断所述第一划分格是否为完全划分;
18、若是,从天气预报数据中分别获取第一划分格中所涉及到的气象站监测到的第二气象数据,并作为子预报数据;
19、若不完全划分,则锁定对应子网格中所存在的所有划分边界线,获取存在的交叉边界以及非交叉边界;
20、获取所述非交叉边界与子网格的第一边界的第一交集区域,并向所述第一交集区域配置与构成非交叉边界的气象站所监测得到的第三气象数据;
21、获取交叉边界与子网格的第一边界的独立区域以及非独立区域,并向所述独立区域配置与构成对应交叉边界的气象站所监测得到的第四气象数据;
22、根据所述非独立区域所涉及到的第一交叉线与第二交叉线,并确定第一交叉线与匹配的第一气象站以及确定第二交叉线与匹配的第二气象站;
23、获取第一气象站和第二气象站对同个非独立区域的第一待分析数据以及第二待分析数据;
24、当所述第一待分析数据与第二待分析数据一致时,从第一气象站和第二气象站中筛选监测精度高的气象站的监测数据作为对同个非独立区域的第五气象数据;
25、当所述第一待分析数据与第二待分析数据不一致时,则从第一交叉线与匹配的第一气象站的第一距离以及确定第二交叉线与匹配的第二气象站的第二距离中筛选较小距离对应的气象站的监测数据作为对同个非独立区域的第六气象数据;
26、判断对应子网格中是否存在空区域;
27、若不存在,则将对应子网格获取得到的所有气象数据作为子预报数据,并对相应子网格按照划分边界线进行子网格再次划分。
28、优选的,判断对应子网格中是否存在空区域之后,还包括:
29、锁定所存在的划分边界线对相应子网格的空区域;
30、根据所述空区域的边界线,来分别确定每个边界线对应外侧区域的当下气象数据,并根据对应外侧区域与所述空区域的地理位置信息以及连接地理信息,确定对应外侧区域向所述空区域的气象转移序列;
31、按照序列-转移分析模型,获取得到对应外侧区域对所述空区域的初始转换数据以及初始转换区域;
32、将所述初始转换数据以及初始转换区域进行优化过渡,得到气象转换数据以及气象转换区域,实现对空区域的区域划分。
33、优选的,将所述初始转换数据以及初始转换区域进行优化过渡,得到气象转换数据以及气象转换区域,包括:
34、当所述气象转移序列为向空区域的直接改变序列时,绘制针对所述空区域的第一气象图,其中,所述气象转移序列与转移位置点以及转移位置点的气象弱化系数相关;
35、当所述第一气象图只有一个时,根据所述第一气象图的气象变化数据,作为对应空区域的气象数据;
36、当所述第一气象图为多个时,根据对应直接改变序列的气象特性以及气象温和度的计算公式,锁定每个第一气象图的气象弱化边界,其中,d1表示气象温和度;sim{d1,d02}表示按照对应第一气象图的气象特性所确定的边界数据d1与同气象特性所设定的边界数据d02的相似函数;表示对应气象特性下的标准比较系数;
37、对相邻初始转换区域所涉及的气象弱化边界进行优化过渡处理,得到气象转换数据以及气象转换区域。
38、优选的,向空间网格中每个子网格配置对应时间点下的子航迹,得到航迹网格,包括:
39、根据航迹数据,向对应子网格进行轨迹绘制,其中,轨迹绘制包括轨迹坐标以及每个轨迹坐标的航迹时间点;
40、将每个子网格的轨迹绘制结果按照时间标准以及轨迹标准进行拼接,获取得到航迹网格。
41、优选的,基于对各类天气状况的权重设置结果,且结合对应子网格的子预报数据,计算对应子网格在匹配时间点下的天气影响度,得到气象网格,包括:
42、确定每个子网格的网格划分数目,并获取匹配时间点下划分子格的子预报数据;
43、基于数据-类型映射表,确定每个划分子格的子预报数据的天气类型;
44、计算对应划分子格在匹配时间点下的初始影响度;
45、;其中,表示对应初始影响度;表示对应天气类型所存在天气影响的设置权重;表示对应划分子格所对应地理位置对天气影响的设置权重;表示的设定系数;表示对的设定系数,且;根据所述初始影响度,计算得到对应子网格在匹配时间点下的天气影响度;
46、;其中,表示满足的初始影响度的存在个数;表示对应子网格中所存在的所有初始影响度的个数;表示对应子网格中第个初始影响度;表示对应子网格的天气影响度;
47、将同个子网格的天气影响度、涉及到的每个划分子格的初始影响度以及匹配的子预报数据标定在对应子网格上,构建得到气象网格。
48、优选的,将所述航迹网格与气象网格进行网格融合处理,得到叠加网格进行飞行提醒,包括:
49、将所述航迹网格与气象网格进行网格叠加,从叠加网格中锁定同个飞行轨迹以及所述同个飞行轨迹所涉及到的气象轨迹,确定起飞安全性;
50、当所述起飞安全性低于预设安全性时,进行安全起飞提醒,同时,判断是否存在可更换轨迹;
51、若不存在,提醒持续等待;
52、若存在,提醒更换轨迹。
53、与现有技术相比,本技术的有益效果如下:
54、通过从四个维度构建空间网格,并结合天气预报数据与航空器探测资料,进行网格叠加处理,来实现有效飞行提醒,保证了飞行安全性。
55、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
56、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。