本技术涉及垃圾中转站可视化的领域,尤其是涉及基于ar的中转站派位可视化方法、装置及存储介质。
背景技术:
1、垃圾中转站是指对垃圾进行收集、分类、压箱以及转运的站点,即垃圾中转站内的卫生情况难以保持,为减少垃圾中转站内的垃圾对周围环境造成影响,常设置有多个摄像头,用户通过摄像头对垃圾中转站内的情况进行查看。但目前为便于垃圾中转站对周围垃圾进行收集以及对垃圾进行分类,垃圾中转站配置有多辆车辆,且每辆车收集特定的垃圾类型,为能尽快对中转站内的垃圾进行转运,一般设置有多个压缩机,每个压缩机均可压缩多种类型的垃圾,且每个压缩机有对应的泊位,以使得车辆能够将垃圾倒入压缩机中,即可能存在同一压缩机内同时压缩存在至少两种类型的垃圾的情况,若同时对至少两种类型的垃圾压缩,将使得后续垃圾处理厂无法对压缩后的垃圾进行处理。
2、因此,如何降低同一压缩机同时压缩至少两种类型的垃圾的出现概率成为一个问题。
技术实现思路
1、为降低同一压缩机同时压缩至少两种类型的垃圾的出现概率,本技术提供了一种基于ar的中转站派位可视化方法、装置及存储介质。
2、第一方面,本技术提供一种基于ar的中转站派位可视化方法,采用如下的技术方案:基于ar的中转站派位可视化方法,包括:
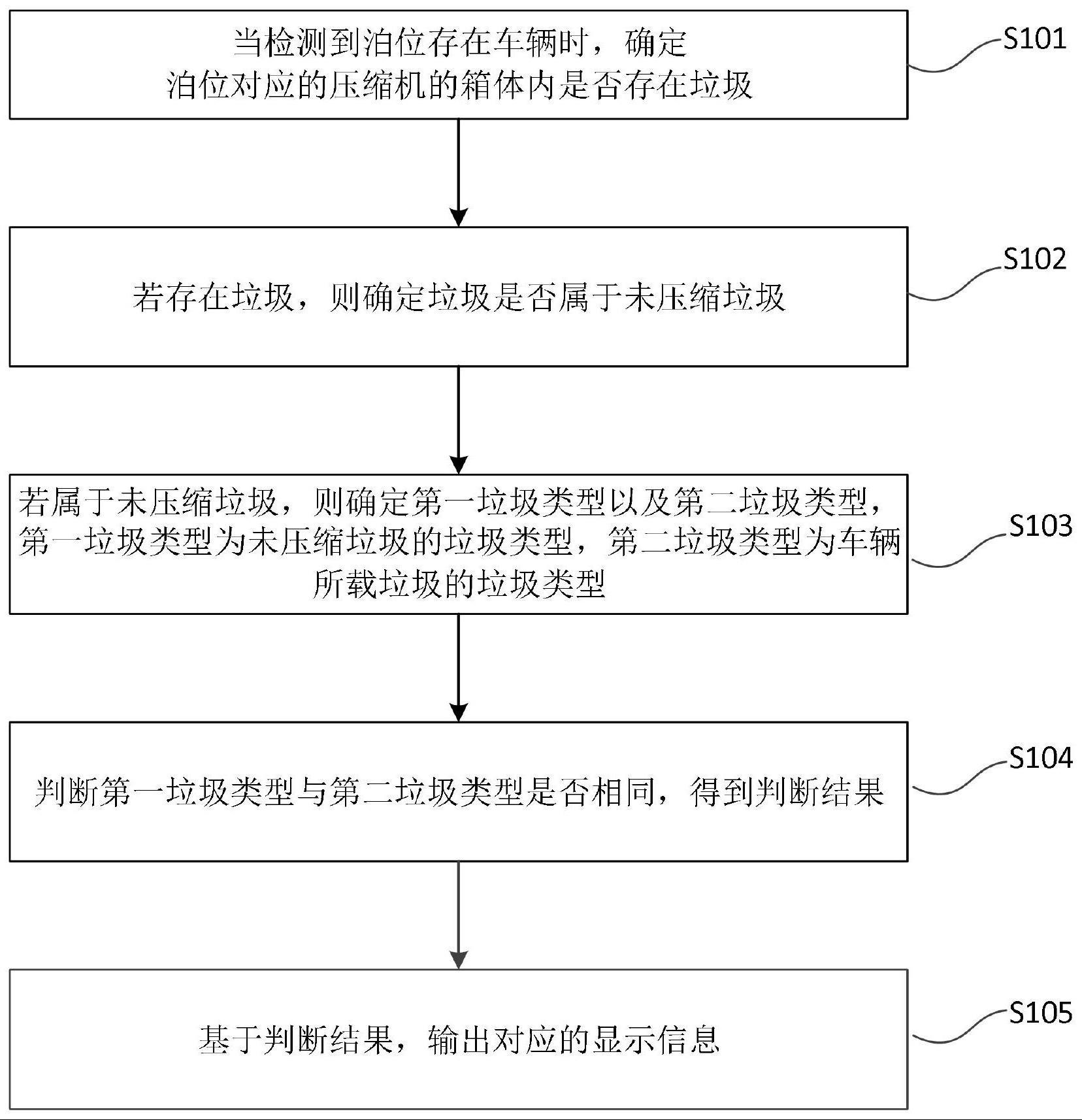
3、当检测到泊位存在车辆时,确定所述泊位对应的压缩机的箱体内是否存在垃圾;
4、若存在垃圾,则确定所述垃圾是否属于未压缩垃圾;
5、若属于未压缩垃圾,则确定第一垃圾类型以及第二垃圾类型,所述第一垃圾类型为所述未压缩垃圾的垃圾类型,所述第二垃圾类型为所述车辆所载垃圾的垃圾类型;
6、判断所述第一垃圾类型与所述第二垃圾类型是否相同,得到判断结果;
7、基于所述判断结果,输出对应的显示信息,所述显示信息用于显示所述车辆是否处于正确的泊位。
8、通过采用上述技术方案,当检测到泊位存在车辆时,确定泊位对应的压缩机的箱体内是否存在垃圾,从而便于后续确定出当前车辆是否能够将所载垃圾直接卸载在该箱体内,当不存在垃圾时,说明车辆能够直接将所载垃圾卸载入该箱体内,压缩机进行压缩时不会存在同时对多种类型的垃圾压缩的情况,未压缩垃圾为压缩机内未经历压缩操作的垃圾,当存在垃圾时,说明车辆无法直接将所载垃圾卸载入压缩机内,而压缩机内的垃圾可能为上次压残留的垃圾,或者为未经历过压缩的未压缩垃圾,因此需首先判断出压缩机内的垃圾是否属于未压缩垃圾,当属于未压缩垃圾时,说明车辆无法将所载垃圾直接卸载入该箱体内,若直接将所载垃圾卸载入该箱体内,可能存在压缩机同时压缩不同类型的垃圾的情况,第一垃圾类型为未压缩垃圾的垃圾类型,第二垃圾类型为车辆所载垃圾的垃圾类型,因此需确定出第一垃圾类型以及第二垃圾类型,从而便于后续判断第一垃圾类型与第二垃圾类型是否相同,得到判断结果,进而达到判断出车辆是否能够直接将所载垃圾卸载入压缩机的箱体内的效果,以便于后续能够根据判断结果输出对应的显示信息,从而使得用户能够及时查看到车辆是否处于正确的泊位,进而达到降低同一压缩机同时压缩至少两种类型的垃圾的出现概率。
9、在另一种可能实现的方式中,所述确定所述泊位对应的压缩机的箱体内是否存在垃圾,包括:
10、获取第一图像信息,所述第一图像信息包含所述箱体内的底面信息;
11、对所述第一图像信息进行图像边缘检测处理,得到边缘检测结果;
12、若所述边缘检测结果中包含至少两个目标的边缘检测结果,则确定所述泊位对应的压缩机的箱体内存在垃圾。
13、通过采用上述技术方案,第一图像信息包含箱体内的底面信息,获取第一图像信息,以便后续能够对第一图像信息进行图像边缘检测处理,从而得到边缘检测结果,而由于第一图像信息为箱体内底面的图像信息,且由于长期对箱体内的垃圾进行压缩且箱体底面与箱体侧壁的连接处位置不易清理,使得边缘检测结果中一定包含箱体底面的边缘检测结果,因此当边缘检测结果中包含至少两个目标的边缘检测结果时,说明箱体底面存在垃圾,即可确定泊位对应的压缩机的箱体内存在垃圾,从而达到判断出泊位对应的压缩机的箱体内存在垃圾的效果。
14、在另一种可能实现的方式中,所述确定所述垃圾是否属于未压缩垃圾,包括:
15、获取第二图像信息、第三图像信息以及规格信息,所述第二图像信息以及所述第三图像信息为从所述箱体的不同角度进行采集的图像信息;
16、基于所述规格信息计算所述箱体的体积,并基于所述第二图像信息以及所述第三图像信息,确定所述垃圾的三维边界点信息;
17、基于所述三维边界点信息计算所述垃圾的体积;
18、基于所述垃圾的体积以及所述箱体的体积,计算体积比值;
19、若所述体积比值达到预设体积比值,则确定所述垃圾属于未压缩垃圾;
20、若所述体积比值未达到所述预设体积比值,则确定所述垃圾不属于未压缩垃圾。
21、通过采用上述技术方案,第二图像信息以及第三图像信息为从该箱体不同角度进行采集的图像信息,获取第二图像信息以及第三图像信息,以便于后续能够基于第二图像信息以及第三图像信息,确定箱体内垃圾的三维边界点信息,并根据三维边界点信息计算出垃圾的体积,从而便于后续根据垃圾的体积判断该垃圾是否属于未压缩垃圾。并获取箱体的规格信息,以便于根据规格信息计算出箱体的体积,从而便于后续根据垃圾的体积以及箱体的体积,计算体积比值,进而根据体积比值,判断出垃圾是否属于未压缩垃圾,预设体积比值为提前设定的体积比值,作为确定垃圾是否属于未压缩垃圾的标准,当体积比值达到预设体积比值时,说明垃圾的体积较大,即箱体内垃圾较多,从而说明该箱体内的垃圾属于未压缩垃圾,而当体积比值未达到预设体积比值时,说明垃圾的体积较小,即箱体内垃圾较少,因此可以说明该箱体内的垃圾不属于未压缩垃圾。
22、在另一种可能实现的方式中,确定第一垃圾类型,包括:
23、获取预设历史时间内所述泊位的视频信息;
24、对所述视频信息进行车牌特征识别,确定至少一个第一目标车辆的车牌信息,所述第一目标车辆为在所述泊位进行卸料的车辆;
25、确定所述至少一个第一目标车辆对应的卸车时间;
26、从所述卸车时间中确定出最晚卸车时间;
27、确定第二目标车牌信息对应的垃圾类型为第一垃圾类型,所述第二目标车牌信息为所述最晚卸车时间对应的第一目标车辆的车牌信息。
28、通过采用上述技术方案,预设历史时间为提前设定的时间,为压缩机内存在垃圾时等待卸载的最长时间,获取预设历史时间内泊位的视频信息,对视频信息进行车牌特征识别,确定至少一个第一目标车辆的车牌信息,以便于后续确定出每个第一目标车辆对应的卸车时间,从而便于从卸车时间中确定出最晚卸车时间,第二目标车牌信息为最晚卸车时间对应的第一目标车辆的车牌信息,进而将第二目标车牌信息对应的垃圾类型为第一垃圾类型,从而达到确定出第一垃圾类型的效果。
29、在另一种可能实现的方式中,确定第二垃圾类型,包括:
30、获取所述车辆的车辆图像信息;
31、对所述车辆图像信息进行车牌特征提取,得到所述车辆的车牌信息;
32、将所述车牌信息在预设车牌库中进行查找,若所述预设车牌库中存在与所述车牌信息一致的预设车牌信息,则将所述预设车牌信息对应的预设垃圾类型确定为所述第二垃圾类型,所述预设车牌库中包括预设车牌信息与预设垃圾类型之间的对应关系。
33、通过采用上述技术方案,获取车辆的车辆图像信息,对该车辆图像信息进行车牌特征提取,得到该车辆的车牌信息,预设车牌库为提前设定的车牌库,其中包括多个预设车牌信息,且每个预设车牌信息有对应的垃圾类型,将车牌信息在预设车牌库中进行查找,当预设车牌库中存在与该车牌信息一致的预设车牌信息时,将该预设车牌信息对应的预设垃圾类型确定为第二垃圾类型,从而达到确定出第二垃圾类型的效果。
34、在另一种可能实现的方式中,所述基于所述判断结果,输出对应的显示信息,包括:若所述判断结果为所述第一垃圾类型与所述第二垃圾类型不同,则输出第一显示信息,所述第一显示信息表征所述车辆处于正确的泊位;
35、若所述判断结果为所述第一垃圾类型与所述第二垃圾类型相同,则基于所述垃圾的体积以及所述箱体的体积,确定剩余体积,并获取所述车辆所载的垃圾的体积,若所述车辆所载的垃圾的体积达到所述剩余体积,则输出所述第一显示信息,若所述车辆所载的垃圾的体积未达到所述剩余体积,则输出第二显示信息,所述第二显示信息表征所述车辆处于错误的泊位。
36、通过采用上述技术方案,当判断结果为第一垃圾类型与第二垃圾类型不同时,说明若将该车辆所载的垃圾卸载入压缩机的箱体内,将使得箱体内存在至少两种类型的垃圾,即可以输出第一显示信息,以使得用户能够明确了解到当前该车辆所处的泊位为错误泊位。而判断结果为第一垃圾类型与第二垃圾类型相同时,说明该车辆所载的垃圾与压缩机箱体内的垃圾的类型相同,但由于可能存在车辆所载的垃圾的体积大于箱体内垃圾的体积的情况,当车辆所载的垃圾大于箱体内的垃圾的体积时,若车辆直接卸料,将使得箱体内的垃圾溢出,因此需根据箱体内垃圾的体积以及箱体的体积确定出剩余体积,并获取车辆所载的垃圾的体积,当车辆所载的垃圾的体积达到剩余体积时,说明此时若将车辆所载的垃圾卸载入箱体内,会使得箱体内的垃圾溢出,即可以确定当前车辆处于错误的泊位,输出第一显示信息,以使得用户能够了解到该车辆处于错误泊位,当车辆所载的垃圾的体积未达到剩余体积时,说明若将车辆所载的垃圾卸载入箱体内,不会使得箱体内的垃圾溢出,因此可以确定该车辆属于正确泊位,输出第二显示信息,以使得用户能够了解到该车辆处于正确的泊位。
37、在另一种可能实现的方式中,所述判断所述第一垃圾类型与所述第二垃圾类型是否相同,得到判断结果,之后还包括:
38、若所述判断结果为所述第一垃圾类型与所述第二垃圾类型不同,则确定中转站内的目标泊位,所述目标泊位对应的压缩机的箱体内不存在垃圾或目标泊位对应的压缩机的箱体内垃圾的垃圾类型与第二垃圾类型相同;
39、将所述目标泊位对应的泊位号发送至所述车辆对应的终端设备。
40、通过采用上述技术方案,当判断结果为第一垃圾类型与第二垃圾类型不同时,说明该车辆无法直接将所载垃圾卸载入箱体内,即该车辆处于错误的泊位上,因此需重新为该车辆确定泊位,当泊位对应的压缩机的箱体内不存在垃圾时,说明若将车辆所载的垃圾卸载入箱体内,箱体内不会同时出现不同垃圾类型的垃圾,即目标泊位可以为压缩机的箱体内不存在垃圾的泊位,而当泊位对应的压缩机的箱体内存在垃圾时,只需箱体内垃圾的垃圾类型与第二垃圾类型相同,则箱体内不会同时出现不同垃圾类型的垃圾,即目标泊位可以为压缩机的箱体内垃圾的垃圾类型与第二垃圾类型相同的泊位。确定中转站内的目标泊位,将目标泊位对应的泊位号发送至车辆对应的终端设备,以使得车辆驾驶员能够将车辆驶入正确的泊位上。
41、第二方面,本技术提供一种基于ar的中转站派位可视化的装置,采用如下的技术方案:
42、基于ar的中转站派位可视化的装置,包括:
43、第一确定模块,用于当检测到泊位存在车辆时,确定所述泊位对应的压缩机的箱体内是否存在垃圾;
44、第二确定模块,用于当存在垃圾时,确定所述垃圾是否属于未压缩垃圾;
45、第三确定模块,用于当属于未压缩垃圾时,确定第一垃圾类型以及第二垃圾类型,所述第一垃圾类型为所述未压缩垃圾的垃圾类型,所述第二垃圾类型为所述车辆所载垃圾的垃圾类型;判断模块,用于判断所述第一垃圾类型与所述第二垃圾类型是否相同,得到判断结果;
46、输出模块,用于基于所述判断结果,输出对应的显示信息,所述显示信息用于显示车辆是否处于正确的泊位。
47、通过采用上述技术方案,当检测到泊位存在车辆时,第一确定模块确定泊位对应的压缩机的箱体内是否存在垃圾,从而便于后续确定出当前车辆是否能够将所载垃圾直接卸载在该箱体内,当不存在垃圾时,说明车辆能够直接将所载垃圾卸载入该箱体内,压缩机进行压缩时不会存在同时对多种类型的垃圾压缩的情况,未压缩垃圾为压缩机内未经历压缩操作的垃圾,当存在垃圾时,说明车辆无法直接将所载垃圾卸载入压缩机内,而压缩机内的垃圾可能为上次压残留的垃圾,或者为未经历过压缩的未压缩垃圾,因此需第二确定模块首先确定出压缩机内的垃圾是否属于未压缩垃圾,当属于未压缩垃圾时,说明车辆无法将所载垃圾直接卸载入该箱体内,若直接将所载垃圾卸载入该箱体内,可能存在压缩机同时压缩不同类型的垃圾的情况,第一垃圾类型为未压缩垃圾的垃圾类型,第二垃圾类型为车辆所载垃圾的垃圾类型,因此需第三确定模块确定出第一垃圾类型以及第二垃圾类型,从而便于后续判断模块判断第一垃圾类型与第二垃圾类型是否相同,得到判断结果,进而达到判断出车辆是否能够直接将所载垃圾卸载入压缩机的箱体内的效果,以便于后续能够输出模块根据判断结果输出对应的显示信息,从而使得用户能够直观地查看到车辆是否处于正确的泊位,进而达到降低同一压缩机同时压缩至少两种类型的垃圾的出现概率。
48、在另一种可能的实现方式中,所述第一确定模块在确定所述泊位对应的压缩机的箱体内是否存在垃圾时,具体用于:
49、获取所述箱体内底面的第一图像信息;
50、对所述第一图像信息进行图像边缘检测处理,得到边缘检测结果;
51、若所述边缘检测结果中包含至少两个目标边缘检测结果,则确定所述泊位对应的压缩机的箱体内存在垃圾。
52、在另一种可能的实现方式中,第二确定模块在确定所述垃圾是否属于未压缩垃圾时,具体用于:
53、获取第二图像信息、第三图像信息以及规格信息,所述第二图像信息以及所述第三图像信息为从所述箱体的不同角度进行采集的图像信息;
54、基于所述规格信息计算所述箱体的体积,并基于所述第二图像信息以及所述第三图像信息,确定所述垃圾的三维边界点信息;
55、基于所述三维边界点信息计算所述垃圾的体积;
56、基于所述垃圾的体积以及所述箱体的体积,计算体积比值;
57、若所述体积比值达到预设体积比值,则确定所述垃圾属于未压缩垃圾;
58、若所述体积比值未达到所述预设体积比值,则确定所述垃圾不属于未压缩垃圾。
59、在另一种可能的实现方式中,第三确定模块在确定第一垃圾类型时,具体用于:
60、获取预设历史时间内所述泊位的视频信息;
61、对所述视频信息进行车牌特征识别,确定至少一个第一目标车辆的车牌信息,所述第一目标车辆为在所述泊位进行卸料的车辆;
62、确定所述至少一个第一目标车辆对应的卸车时间;
63、从所述卸车时间中确定出最晚卸车时间;
64、确定第二目标车牌信息对应的垃圾类型为第一垃圾类型,所述第二目标车牌信息为所述最晚卸车时间对应的第一目标车辆的车牌信息。
65、在另一种可能的实现方式中,确定第二垃圾类型时,具体用于:
66、获取所述车辆的车辆图像信息;
67、对所述车辆图像信息进行车牌特征提取,得到所述车辆的车牌信息;
68、将所述车牌信息在预设车牌库中进行查找,若所述预设车牌库中存在与所述车牌信息一致的预设车牌信息,则将所述预设车牌信息对应的预设垃圾类型确定为所述第二垃圾类型,所述预设车牌库中包括预设车牌信息与预设垃圾类型之间的对应关系。
69、在另一种可能的实现方式中,所述输出模块在基于所述判断结果,输出对应的显示信息时,具体用于:
70、若所述判断结果为所述第一垃圾类型与所述第二垃圾类型不同,则输出第一显示信息,所述第一显示信息表征所述车辆处于正确的泊位;
71、若所述判断结果为所述第一垃圾类型与所述第二垃圾类型相同,则基于所述垃圾的体积以及所述箱体的体积,确定剩余体积,并获取所述车辆所载的垃圾的体积,若所述车辆所载的垃圾的体积达到所述剩余体积,则输出所述第一显示信息,若所述车辆所载的垃圾的体积未达到所述剩余体积,则输出第二显示信息,所述第二显示信息表征所述车辆处于错误的泊位。
72、在另一种可能的实现方式中,所述装置还包括:
73、第四确定模块,用于当所述判断结果为所述第一垃圾类型与所述第二垃圾类型不同时,确定中转站内的目标泊位,所述目标泊位对应的压缩机的箱体内不存在垃圾或目标泊位对应的压缩机的箱体内垃圾的垃圾类型与第二垃圾类型相同;
74、发送模块,用于将所述目标泊位对应的泊位号发送至所述车辆对应的终端设备。
75、第三方面,本技术提供一种电子设备,采用如下的技术方案:
76、一种电子设备,该电子设备包括:
77、至少一个处理器;
78、存储器;
79、至少一个应用程序,其中至少一个应用程序被存储在存储器中并被配置为由至少一个处理器执行,至少一个应用程序配置用于:执行根据第一方面任一种可能的实现方式所示的基于ar的中转站派位可视化方法。
80、第四方面,本技术提供一种计算机可读存储介质,采用如下的技术方案:
81、一种计算机可读存储介质,当所述计算机程序在计算机中执行时,令所述计算机执行第一方面任一项所述的基于ar的中转站派位可视化方法。
82、综上所述,本技术包括以下至少一种有益技术效果:
83、1.当检测到泊位存在车辆时,确定泊位对应的压缩机的箱体内是否存在垃圾,从而便于后续确定出当前车辆是否能够将所载垃圾直接卸载在该箱体内,当不存在垃圾时,说明车辆能够直接将所载垃圾卸载入该箱体内,压缩机进行压缩时不会存在同时对多种类型的垃圾压缩的情况,未压缩垃圾为压缩机内未经历压缩操作的垃圾,当存在垃圾时,说明车辆无法直接将所载垃圾卸载入压缩机内,而压缩机内的垃圾可能为上次压残留的垃圾,或者为未经历过压缩的未压缩垃圾,因此需首先确定出压缩机内的垃圾是否属于未压缩垃圾,当属于未压缩垃圾时,说明车辆无法将所载垃圾直接卸载入该箱体内,若直接将所载垃圾卸载入该箱体内,可能存在压缩机同时压缩不同类型的垃圾的情况,第一垃圾类型为未压缩垃圾的垃圾类型,第二垃圾类型为车辆所载垃圾的垃圾类型,因此需确定出第一垃圾类型以及第二垃圾类型,从而便于后续判断第一垃圾类型与第二垃圾类型是否相同,得到判断结果,进而达到判断出车辆是否能够直接将所载垃圾卸载入压缩机的箱体内的效果,以便于后续能够根据判断结果输出对应的显示信息,从而使得用户能够直观地查看到车辆是否处于正确的泊位,进而达到降低同一压缩机同时压缩至少两种类型的垃圾的出现概率;
84、2.当判断结果为第一垃圾类型与第二垃圾类型不同时,说明该车辆无法直接将所载垃圾卸载入箱体内,即该车辆处于错误的泊位上,因此需重新为该车辆确定泊位,当泊位对应的压缩机的箱体内不存在垃圾时,说明若将车辆所载的垃圾卸载入箱体内,箱体内不会同时出现不同垃圾类型的垃圾,即目标泊位可以为压缩机的箱体内不存在垃圾的泊位,而当泊位对应的压缩机的箱体内存在垃圾时,只需箱体内垃圾的垃圾类型与第二垃圾类型相同,则箱体内不会同时出现不同垃圾类型的垃圾,即目标泊位可以为压缩机的箱体内垃圾的垃圾类型与第二垃圾类型相同的泊位。确定中转站内的目标泊位,将目标泊位对应的泊位号发送至车辆对应的终端设备,以使得车辆驾驶员能够将车辆驶入正确的泊位上。