一种飞机表面几何精度检测方法、装置、设备及介质与流程
本技术涉及飞机数字化制造领域,尤其涉及一种飞机表面几何精度检测方法、装置、设备及介质。
背景技术:
1、现代飞机设计过程中,为使用维护方便,通常会在飞机表面设计多个可拆卸口盖,而口盖密封成为了其中的关键技术,若密封不严,会导致雨、水汽、尘埃等物质进入机体内部,影响关键电子元件工作,对飞行安全造成较大隐患。飞机表面口盖连接至飞机机身时,需要在连接部位粘接密封胶条,通过螺栓的压紧力进行密封,而密封胶条粘接后表面几何精度对密封效果起着决定性影响:表面几何精度越高,密封胶条与口盖的压紧平面贴合度越高,密封效果越好。因此在密封胶条粘贴后,对其表面几何精度的提取与评价十分重要。
2、现有技术中对飞机表面精度的检测主要通过卡板工装对比,存在评价结果可靠性低的问题。
3、上述内容仅用于辅助理解本技术的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本技术的主要目的在于提供一种飞机表面几何精度检测方法、装置、设备及介质,旨在解决现有飞机表面几何精度检测方法存在检测精度低的技术问题。
2、为实现上述目的,本技术提供一种飞机表面几何精度检测方法,所述方法包括以下步骤:
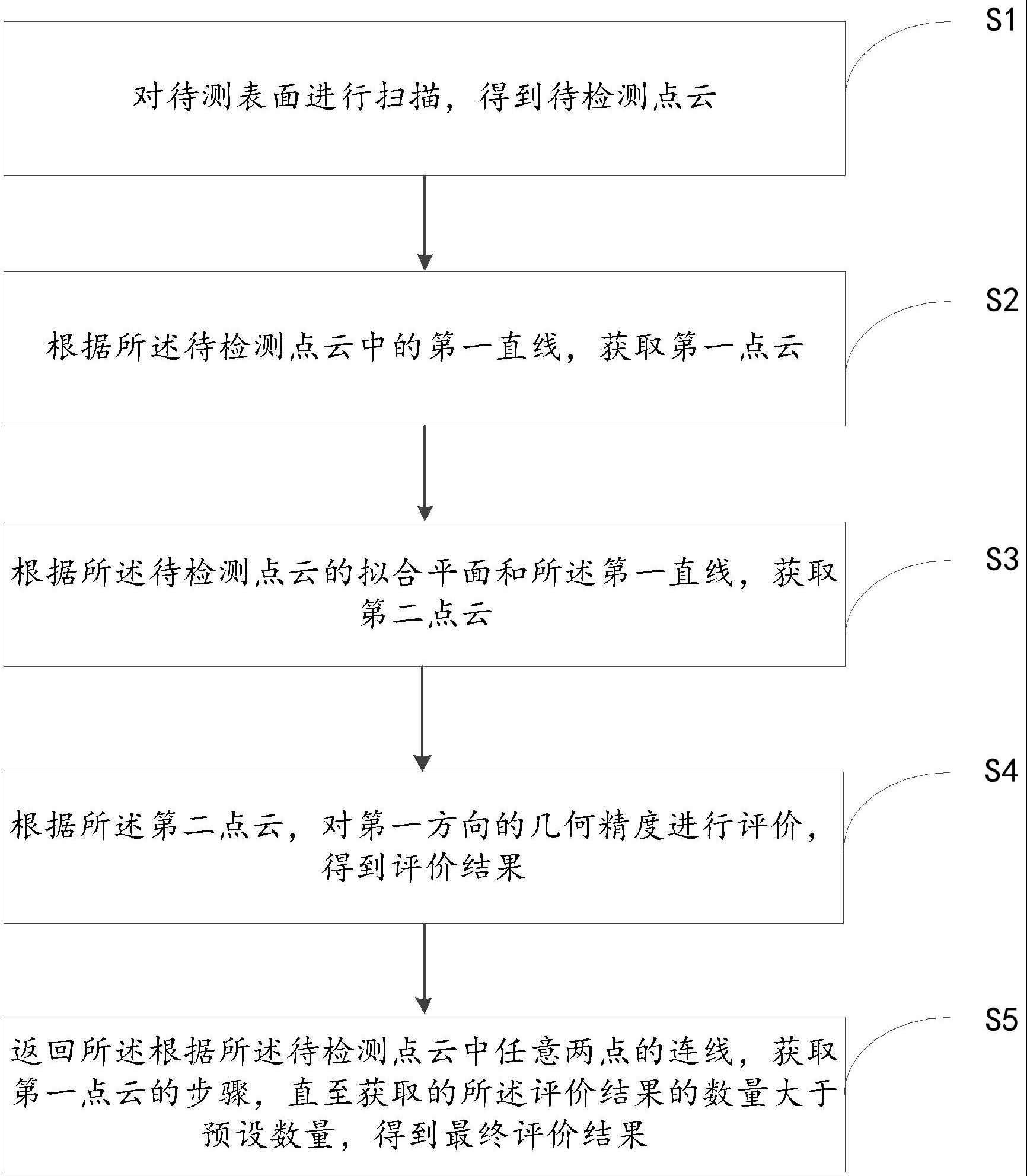
3、对待测表面进行扫描,得到待检测点云;
4、根据所述待检测点云中的第一直线,获取第一点云,其中,第一直线为所述待检测点云中第一点和第二点的连线,所述第一点和所述第二点为所述待检测点云中的任意两点;
5、根据所述待检测点云的拟合平面和所述第一直线,获取第二点云,其中,过所述第一直线并且垂直于所述拟合平面的平面为第一平面;
6、根据所述第二点云,对第一方向的几何精度进行评价,得到评价结果,其中,所述第一方向为所述第一点指向所述第二点的方向;
7、返回所述根据所述待检测点云中任意两点的连线,获取第一点云的步骤,直至获取的所述评价结果的数量大于预设数量,得到检测结果。
8、作为本技术的一些可选实施例,所述根据所述待检测点云中的第一直线,获取第一点云的步骤,包括:
9、根据随机数算法,获取所述待检测点云中的任意两点,分别记为第一点和第二点;
10、根据所述第一点和所述第二点获取所述第一直线;
11、根据所述待检测点云和所述第一直线,获取第一点云,其中,所述第一点云的点与所述第一直线之间的距离小于预设距离。
12、作为本技术的一些可选实施例,所述根据所述待检测点云的拟合平面和所述第一直线,获取第二点云的步骤,包括:
13、根据最小二乘拟合方法,对所述待检测点云进行平面拟合,得到拟合平面;
14、获取过所述第一直线并且垂直于所述拟合平面的平面,记为第一平面;
15、根据预设方法和所述第一平面,获取第二点云。
16、作为本技术的一些可选实施例,所述根据预设方法和所述第一平面,获取第二点云的步骤,包括:
17、根据所述第一点云中每一点与所述第一直线之间的距离,获取初始点,获取初始点,其中,所述初始点与所述第一直线的距离最小且不为0;
18、以所述初始点在所述第一平面的垂直投影作为原点,建立三维坐标系,其中,所述三维坐标系以所述初始点和所述原点的连线为x轴,以第一方向为y轴,所述第一方向为所述第一直线的方向;
19、根据所述第一点云,在所述三维坐标系的第一象限和第五象限的所有点中获取与所述初始点距离最小的第一目标点;
20、根据所述第一点云,在所述三维坐标系的第四象限和第八象限的所有点中获取与所述初始点距离最小的第二目标点;
21、分别将所述第一目标点和第二目标点作为原点建立三维坐标系,并返回所述根据所述第一点云,在所述三维坐标系的第一象限和第五象限的所有点中获取与所述初始点距离最小的第一目标点的步骤,直到预设搜索范围中不存在点,得到中间点云;
22、沿所述第一方向依次连接所述中间点云中的所有点,得到第一折线;
23、根据所述第一折线和所述第一平面的交点,得到第二点云。
24、作为本技术的一些可选实施例,所述根据所述第二点云,对所述连线的方向的几何精度进行评价,得到评价结果:
25、建立平面坐标系,其中,所述平面坐标系以所述第一点为原点,以所述第一方向为x轴,以过所述第一点的所述第一平面的法向量为y轴;
26、沿所述第一方向,依次连接所述第二点云中的所有点,得到第二折线;
27、获取所述第二折线与所述平面坐标系的x轴的面积和所述第二折线在所述x轴的投影长度;
28、当所述面积和所述投影长度的比例大于预设合格阈值,则所述评价结果为不合格;
29、否则,所述评价结果为合格。
30、作为本技术的一些可选实施例,所述返回所述根据所述待检测点云中任意两点的连线,获取第一点云的步骤,直至获取的所述评价结果的数量大于预设数量,得到检测结果的步骤,包括:
31、返回所述根据所述待检测点云中任意两点的连线,获取第一点云的步骤,直至获得所述预设数量的评价结果;
32、根据所有所述评价结果,获取合格数量;
33、根据所述合格数量和所述预设数量,得到检测结果。
34、作为本技术的一些可选实施例,所述预设数量大于1000。
35、此外,为实现上述目的,本技术还提供一种飞机表面几何精度检测装置,所述装置包括:
36、扫描模块,用于对待测表面进行扫描,得到待检测点云;
37、第一获取模块,用于根据所述待检测点云中的第一直线,获取第一点云,其中,第一直线为所述待检测点云中第一点和第二点的连线,所述第一点和所述第二点为所述待检测点云中的任意两点;
38、第二获取模块,根据所述待检测点云的拟合平面和所述第一直线,获取第二点云,其中,所述第一平面过所述第一直线并且垂直于所述拟合平面;
39、第一评价模块,用于根据所述第二点云,对第一方向的几何精度进行评价,得到评价结果,其中所述第一方向为所述第一点指向所述第二点的方向;
40、第二评价模块,用于控制所述第一获取模块、所述第二获取模块和所述第二获取模块循环执行,直至获取的所述评价结果的数量大于预设数量,得到检测结果。
41、为解决上述技术问题,本技术还提出了电子设备,包括:至少一个处理器、至少一个存储器以及存储在存储器中的计算机程序指令,当计算机程序指令被处理器执行时实现如上述的方法。
42、为解决上述技术问题,本技术还提出了一种存储介质,其上存储有计算机程序指令,当计算机程序指令被处理器执行时实现如上述方法。
43、综上所述,本发明的有益效果如下:
44、本技术所述的飞机表面几何精度检测方法、装置、设备及介质,通过对待测表面进行扫描,得到待检测点云;根据所述待检测点云中的第一直线,获取第一点云,其中,第一直线为所述待检测点云中第一点和第二点的连线,所述第一点和所述第二点为所述待检测点云中的任意两点;根据所述待检测点云的拟合平面和所述第一直线,获取第二点云,其中,所述第一平面过所述第一直线并且垂直于所述拟合平面;根据所述第二点云,对第一方向的几何精度进行评价,得到评价结果,其中,所述第一方向为所述第一点指向所述第二点的方向;返回所述根据所述待检测点云中任意两点的连线,获取第一点云的步骤,直至获取的所述评价结果的数量大于预设数量,得到检测结果。可以看出,本技术的飞机表面几何精度检测方法,通过非接触式测量对待检测表面进行测量,测量过程不会使得待测表面产生形变,造成待测表面的二次损伤,提升了检测结果的准确性;并且,与现有技术中,只能对一个直线方向进行测量,本技术通过算法对点云进行处理,可针对多个直线方向进行数据获取,评价更加全面,从而提高了最终检测结果的可靠性;最后,本技术的方案仅在扫描步骤中需要人工介入,其余步骤均通过算法自动完成,自动化程度高。
- 还没有人留言评论。精彩留言会获得点赞!