一种基于改进RANSAC的多线程地面特征提取方法
本发明属于基于激光雷达的同时定位与建图(light detection andranging simultaneous localization and mapping,lidar slam),具体是一种基于改进随机一致性采样(random sample consensus,ransac)的多线程地面特征提取方法。
背景技术:
1、随着时代的发展,同步定位与建图(simultaneous localization and mapping,slam)技术逐渐成为室内外定位的关键技术之一。slam技术根据传感器类型可分为:激光雷达(light detection and ranging,lidar)slam和视觉slam两种。相比于视觉传感器,lidar传感器能够获取丰富的、具有深度信息的点云数据,具有抗干扰能力强、不受光照变化影响等优点,现在已经成为实现室内外定位技术的关键传感器之一。按照适用场景,lidar slam可分为二维(two dimensional,2d)lidar slam和三维(three dimensional,3d)lidar slam。2d lidar slam可获取平台在2d平面的三自由度位姿和2d地图。到目前为止2d lidar slam经过了十几年的发展,现包括fastslam、hector-slam、gmapping等算法。相比于2d lidar slam,虽然3d lidar slam成本较高,并且数据处理量大,但是其在2dlidar slam通常无法工作的大型室外场景中更加可靠,因此3d lidar slam算法已成为室外复杂场景下定位与建图的首选方案之一。常见的3d lidar slam算法在前端多使用基于地面特征和聚类特征的配准方法来获得lidar里程计数据。其中,地面特征在室外场景中相对稳定,同时点云数量也多于聚类特征,因此提高地面特征提取的质量和精度,可以从根本上提高lidar slam特征配准精度。
2、目前,3d lidar slam算法多采用角度判断的方式从原始点云数据中进行地面特征提取,但是当lidar传感器(如16线)分辨率扫描线数较低的更小,利用lidar slam获取到的数据中地面点会大量减少。同时由于lidar slam算法会对原始点云进行过轻量级处理,导致在室外场景地面点分割过程中会出现过分割或欠分割情况,而影响定位精度。
3、在室外复杂场景下,目前常用的点云分割算法包括基于ransac的点云分割算法、基于区域增长(region growing,rg)的点云分割算法以及基于霍夫变换(houghtransform,ht)的点云分割算法。基于rg的点云分割算法原理简单、容易实现,但是对噪声非常敏感并且分割精度较低。基于ht的点云分割算法在复杂环境中的形状检测效果很好,但是存在耗时长、内存占用量大的缺点。与前两种算法相比,ransac算法可以鲁棒地获取模型参数,不但用于基础3d点云分割以及3d点云检测,而且可以和其他算法相结合来解决室外复杂场景下的点云分割问题。文献将ransac算法与深度学习算法相结合,可以对建筑物屋顶进行分割,并且屋顶点云完整度较高。因此利用ransac算法进行地面分割可以鲁棒地获取完整度较高的地面点云。但是由于传统ransac算法种子点筛选流程过于繁琐,并且无法保证种子点质量,将导致平面拟合精度和算法效率大幅度降低。
4、本发明针对lidar slam算法地面特征提取中存在特征提取准确度不高,以及ransac算法的缺点,提出了一种基于改进ransac的多线程地面分割算法,通过提高lidarslam地面特征提取质量和精度,进而提高lidar slam特征匹配精度。
技术实现思路
1、针对现有技术的不足,本发明提出一种基于改进ransac的多线程地面特征提取方法,利用点云高程阈值、曲率阈值等筛选种子点集合,确定初始地面模型,根据种子点数量确定处理模式,为确保数据处理的实时性,选择合适的线程处理模式利用改进ransac算法进行地面拟合。
2、一种基于改进ransac的多线程地面特征提取方法包括以下步骤:
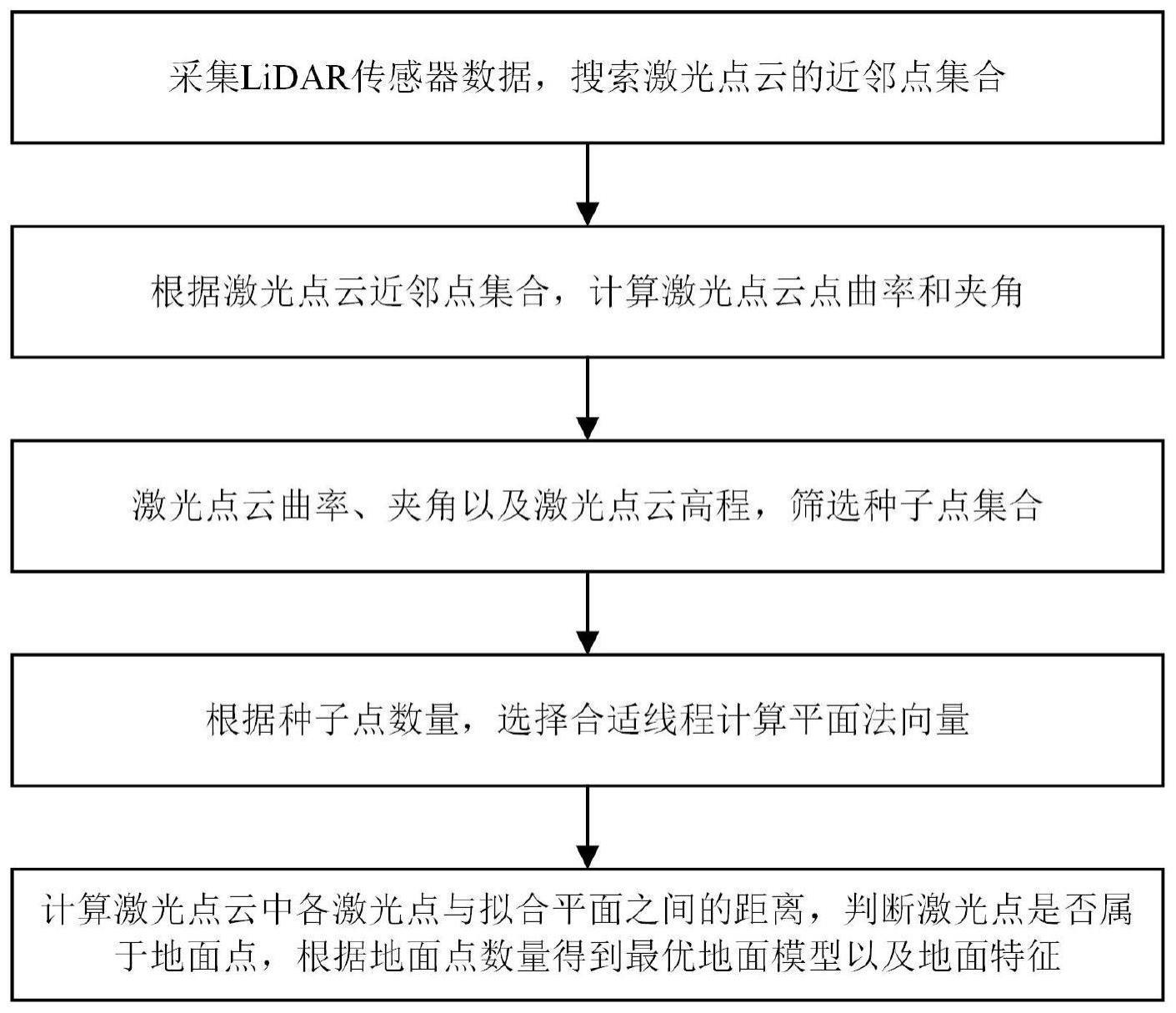
3、步骤1、采集lidar传感器数据,搜索激光点云的近邻点集合;
4、步骤2、基于步骤1得到的近邻点集合,计算激光点云点曲率和夹角;
5、步骤3、基于步骤2得到的激光点云曲率、夹角以及激光点云高程,筛选种子点集合;
6、步骤4、基于步骤3得到的种子点集合,根据种子点数量,选择合适线程计算平面法向量;
7、步骤5、基于步骤4得到的平面法向量,计算激光点云中各激光点与平面之间的距离,判断激光点是否属于地面点,根据地面点数量得到最优地面模型以及地面点云。
8、步骤1所述在获得当前激光点云数据后,可利用多维二叉树(k-dimensionaltrees,kd-trees)对当前激光点云中各激光点的近邻点,按照距离值进行搜索,最终获取激光点云中各激光点的近邻点集合。
9、步骤2所述的利用当前激光点的近邻点集合计算当前激光点曲率和夹角;
10、具体步骤如下:
11、步骤2-1、假设当前激光点近邻点集合中包含n个点,各近邻点p(neighbor,i)坐标为(xi,yi,zi)(i=1,2,…,n);
12、计算当前点近邻点集合各坐标均值:
13、
14、其中分别为近邻点集合pneighbor中所有点的x、y、z三个坐标均值;
15、步骤2-2、基于步骤2-1计算得到的x、y、z三个坐标均值,构建计算近邻点集合pneighbor的协方差矩阵cneighbor:
16、
17、步骤2-3、基于步骤2-2计算得到的协方差矩阵,计算矩阵特征值λ及其对应的特征向量:
18、|cneighbor-λe|=0 (3)
19、计算得到的特征值中,最大特征值λmax为当前激光点p(l,cur)所对应的曲率ccur;最小特征值λmin所对应的特征向量为当前激光点p(l,cur)的近似法向量
20、步骤2-4、基于步骤2-3得到的当前激光点法向量,计算当前激光点点p(l,cur)与lidar传感器坐标原点ol连线形成的向量与法向量的夹角值
21、
22、步骤3所述的将当前激光点的曲率、夹角以及当前激光点高程,分别与曲率阈值cth、夹角阈值和高程阈值hth进行比较,如果当前激光点三种数值均小于阈值,则将当前激光点加入种子点集合pseeds。
23、步骤4所述的利用种子点集合pseeds,根据种子点数量,选择合适线程计算平面法向量;
24、具体步骤如下:
25、步骤4-1、判断种子点集合中的种子点数量nseeds是否大于三倍线程数nthread,如果大于就将种子点集合分成nthread个子集,分nthread线程进行处理,各线程的处理方式相同,否则单线程处理;
26、步骤4-2、假设按照多线程进行处理并假设当前为ti(i=1,2,…,nthread)线程,从ti线程种子点集合中随机选取三个点作为ti线程地面拟合的种子点;
27、根据公式(4)计算得到利用上述三个种子点拟合平面的平面法向量
28、
29、其中、为和两点构成的向量;为和两点构成的向量,法向量垂直于两个相交向量。
30、步骤5所述的利用平面法向量,计算当前激光点云中各激光点与平面之间的距离,判断激光点是否属于地面点,根据地面点数量得到最优地面模型以及地面点云;
31、具体步骤如下:
32、步骤5-1、假设当前激光点云中,除种子点外的剩余激光点为p(l,other),根据公式(5)求得点到平面距离dother:
33、
34、其中,为当前平面外一点与平面内一点所构成的向量,用于求解当前剩余点到拟合平面的距离;
35、步骤5-2、当点到平面距离小于距离阈值dth时,则认为当前剩余点p(l,other)为地面点。遍历全部剩余点判断来筛选地面点并保存地面点数量,然后从种子点集合中不重复地选择三个种子点重新拟合平面。重复上述步骤,统计属于当前地面模型的地面点数量,最后将地面点数量最多的平面参数作为地面参数进行保存,对应的模型为最优地面模型,对应点云为地面点云。
36、本发明优点:
37、1、利用改进ransac地面特征提取算法对地面特征进行提取,与现有lidar slam算法的地面特征提取模块地面特征提取结果进行对比,本发明提取到的地面特征精度更高,完整度更好。
38、2、将本发明处理后的点云数据输入lego-loam进行定位与建图,相较于基于传统lego-loam算法输出结果,定位误差降低至3.73m,平面均方根误差降低了20.8%,定位精度更高。
- 还没有人留言评论。精彩留言会获得点赞!