无需精确标注数据的车道线分割方法及装置与流程
本技术涉及地图图像处理领域,尤其涉及一种无需精确标注数据的车道线分割方法及装置。
背景技术:
1、自动驾驶车在行驶时,或者在制作高精度地图时,需要知道车道线的准确位置,以便确定行驶安全区域,或者根据车道线做出一些决策。
2、目前,逐渐出现了多种图像分割模型,用于对各类图像进行分割。图像分割模型一般是对图像进行像素级的类别,可以对图像进行精细的分割。在对车道线进行语义分割前需要人工对图像中车道线部分的每一个像素进行标注,标注很难精确到像素级,很难保证每一个像素被标注的都是准确的,所以通常人工标注的数据都存在一些像素被错误标注的情况。
3、由于使用错误的数据,对模型的估计比实际要糟糕。另外,标记数据还被用来更新权重,错误标记的数据会导致图像分割权重更新错误。但想要标注的数据精确到每一个像素,一方面标注人员需要花更多的时间标注,标注成本变高,另一方面,即使花了大量时间标注,最后也很难保证每一个像素都被标注正确。
4、因此,在现有技术中,在训练语义分割网络中车道线标注数据不精准情况下,如何实现对车道线的精准分割是亟待解决的问题。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本技术提供一种无需精确标注数据的车道线分割方法及装置,能够剔除车道线标注异常的车道线数据并提高对车道线分割的准确性。
2、本技术第一方面提供一种无需精确标注数据的车道线分割方法,包括:
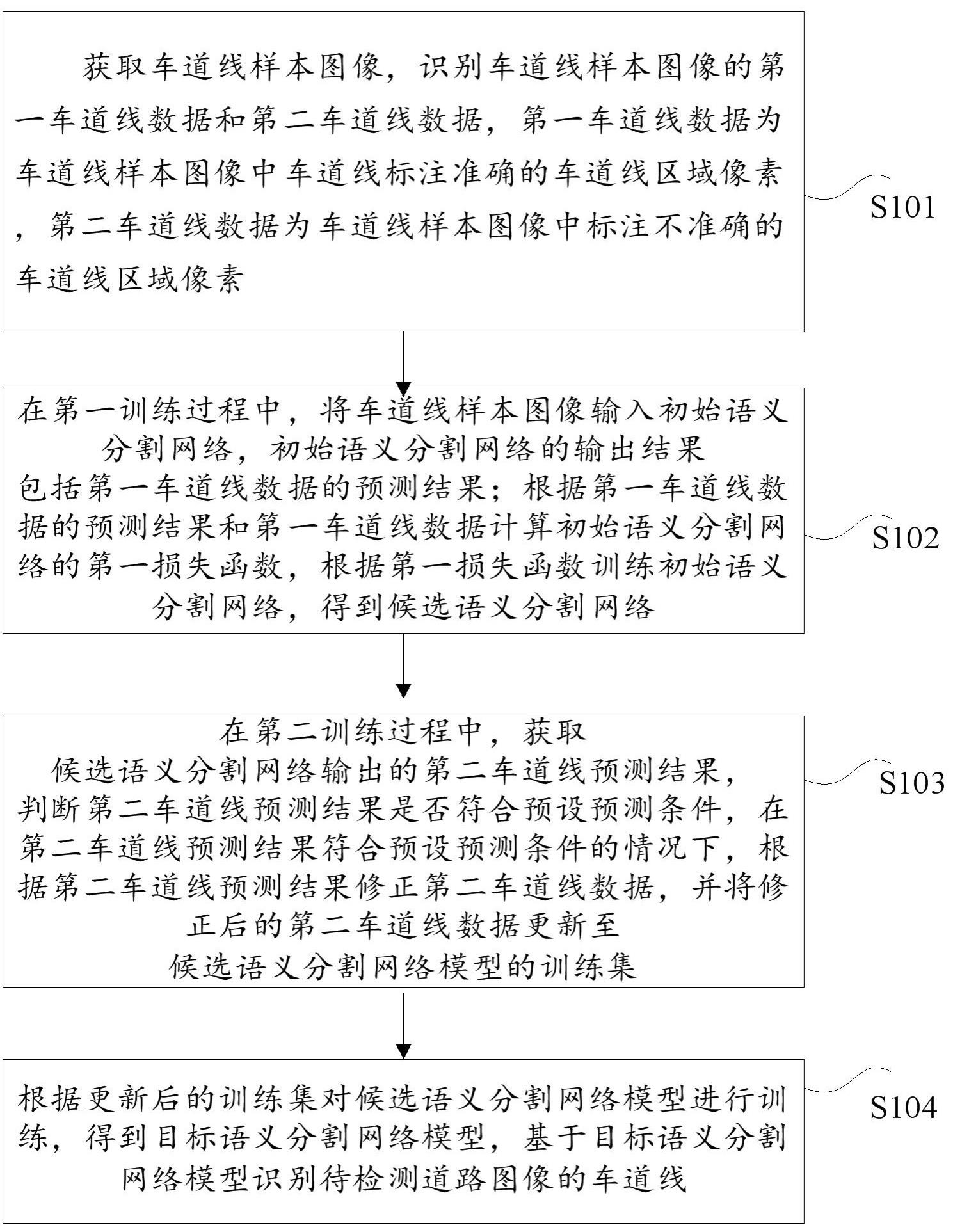
3、获取车道线样本图像,识别车道线样本图像的第一车道线数据和第二车道线数据,第一车道线数据为车道线样本图像中车道线标注准确的车道线区域像素,第二车道线数据为车道线样本图像中标注不准确的车道线区域像素;
4、在第一训练过程中,将所述车道线样本图像输入初始语义分割网络,所述初始语义分割网络的输出结果包括第一车道线数据的预测结果;根据第一车道线数据的预测结果和第一车道线数据计算初始语义分割网络的第一损失函数,根据第一损失函数训练初始语义分割网络,得到候选语义分割网络;
5、在第二训练过程中,获取所述候选语义分割网络输出的第二车道线预测结果,判断第二车道线预测结果是否符合预设预测条件,在第二车道线预测结果符合预设预测条件的情况下,根据第二车道线预测结果修正第二车道线数据,并将修正后的第二车道线数据更新至候选语义分割网络模型的训练集;
6、根据更新后的训练集对候选语义分割网络模型进行训练,得到目标语义分割网络模型,基于目标语义分割网络模型识别待检测道路图像的车道线。
7、可选地,识别车道线样本图像的第一车道线数据和第二车道线数据,包括:
8、基于边缘检测算法识别车道线样本图像的车道线像素,车道线像素携带有车道线标注;
9、检测车道线像素的边缘像素,将车道线像素的边缘像素设置为未标注像素,并基于携带有车道线标注的像素生成第一车道线数据;
10、剔除车道线像素中的第一车道线数据,得到第二车道线数据。
11、可选地,根据第一车道线数据的预测结果和第一车道线数据计算初始语义分割网络的第一损失函数,根据第一损失函数训练初始语义分割网络,得到候选语义分割网络,包括:
12、将车道线样本图像输入初始语义分割网络中,得到车道线预测结果,车道线预测结果包括第一车道线数据的预测结果,第一车道线数据的预测结果包括第一车道线数据为目标车道线的第一预测概率;
13、根据第一车道线数据和第一车道线预测结果,计算初始语义分割网络的第一损失函数,根据第一损失函数调整初始语义分割网络的参数,得到候选语义分割网络。
14、可选地,方法还包括:在第一训练过程满足第二训练过程启动条件时,启动第二训练过程;第二训练过程启动条件包括:在第一训练过程中初始语义分割网络训练次数满足预设训练次数。
15、可选地,在第二车道线预测结果符合预设预测条件的情况下,根据第二车道线预测结果修正第二车道线数据,包括:
16、第二车道线预测结果包括第二车道线数据为目标车道线的第二预测概率;
17、在第二预测概率小于第一阈值且第二车道线数据携带有车道线标识的情况下,判定第二车道线数据的车道线标注错误,并剔除车道线标注错误的车道线数据;
18、在第二预测概率大于第二阈值且第二车道线数据不携带有车道线标识的情况下,判定第二车道线数据的车道线标注漏标,并给车道线标注漏标的第二车道线数据增加车道线标识。
19、可选地,给车道线标注漏标的第二车道线数据增加车道线标识之后,包括:
20、将更新后的车道线数据输入候选语义分割网络,得到第三车道线预测结果;
21、在第三车道线预测结果满足预设预测条件的情况下,将上述第三车道线预测结果输入候选语义分割网络,以实现第二车道线数据的动态生长。
22、可选地,第二车道线数据的动态生长包括:在第一像素点到第二像素点的距离大于预设像素距离时,候选语义分割网络停止训练;其中,第一像素点为第二车道线数据的预测车道线数据中远离车道线中间的像素点,第二像素点为待修正的第二车道线数据中最靠近第一像素点且携带有车道线标注的像素点。
23、本技术第二方面提供一种无需精确标注数据的车道线分割装置,该装置包括:
24、获取模块,用于获取车道线样本图像,识别车道线样本图像的第一车道线数据和第二车道线数据,第一车道线数据为车道线样本图像中车道线标注准确的车道线区域像素,第二车道线数据为车道线样本图像中标注不准确的车道线区域像素;
25、第一训练模块,用于在第一训练过程中,将所述车道线样本图像输入初始语义分割网络,所述初始语义分割网络的输出结果包括第一车道线数据的预测结果;根据第一车道线数据的预测结果和第一车道线数据计算初始语义分割网络的第一损失函数,根据第一损失函数训练初始语义分割网络,得到候选语义分割网络;
26、第二训练模块,用于在第二训练过程中,获取所述候选语义分割网络输出的第二车道线预测结果,判断第二车道线预测结果是否符合预设预测条件,在第二车道线预测结果符合预设预测条件的情况下,根据第二车道线预测结果修正第二车道线数据,并将修正后的第二车道线数据更新至候选语义分割网络模型的训练集;
27、分割模块,用于根据更新后的训练集对候选语义分割网络模型进行训练,得到目标语义分割网络模型,基于目标语义分割网络模型识别待检测道路图像的车道线。
28、本技术第三方面提供一种电子设备,包括:
29、处理器;以及
30、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
31、本技术第四方面提供一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如上所述的方法。
32、本技术提供的技术方案可以包括以下有益效果:第一方面本技术训练初始语义分割网络包括第一训练过程和第二训练过程;本技术首先识别车道线样本图像的第一车道线数据和第二车道线数据,第一车道线数据为车道线样本图像中车道线标注准确的车道线区域像素,第二车道线数据为车道线样本图像中标注不准确的车道线区域像素;在第一训练过程中,将车道线样本图像输入初始语义分割网络得到第一车道线数据的预测结果;根据第一车道线数据的预测结果和第一车道线数据计算初始语义分割网络的第一损失函数,根据第一损失函数训练初始语义分割网络,得到候选语义分割网络;在第一训练过程中通过较为准确的车道线标注训练得到准确率较高的候选语义分割模型。
33、第二方面,在第二训练过程中,获取所述候选语义分割网络输出的第二车道线预测结果,判断第二车道线预测结果是否符合预设预测条件,在第二车道线预测结果符合预设预测条件的情况下,根据第二车道线预测结果修正第二车道线数据,并将修正后的第二车道线数据更新至候选语义分割网络模型的训练集;根据更新后的训练集对候选语义分割网络模型进行训练,得到目标语义分割网络模型,基于目标语义分割网络模型识别待检测道路图像的车道线。第二训练过程通过根据第一训练过程中的第二车道线预测结果修正第二车道线数据,可以修正人工标注带来的偏差,同时更新语义分割模型的训练集,使得最终获取的目标语义分割网络的结果更为准确。
34、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!