一种多传感器数据融合的排水管道三维模型构建系统
本发明属于排水管道建模领域,更具体地,涉及一种多传感器数据融合的排水管道三维模型构建系统。
背景技术:
1、随着现代城市的不断发展,城市排水管道作为城市的重要基础设施之一,其运营里程正不断增长。排水系统的运行质量直接影响城市景观、环境卫生和居民生活,可以说在某种程度上制约着城市的发展水平。在排水管道铺设完成后,管道中的环境无法从外界直接观测,借助管道机器人建立排水管道的三维模型,对于排水管道缺陷定位等作业而言,有着十分重要的意义。
2、即时定位与地图构建(simultaneous localization and mapping,slam),即在一个未知领域内机器人从一个未知位置开始移动,在移动过程中根据位置估计和周围地图对自身进行定位,同时在自身定位的基础上进行增量式的地图更新,从而实现机器人的自主定位和导航。
3、现在也有部分高校与公司开发机器人来进行管网探测,比如德国慕尼黑工业大学的八足管道机器人,采用摄像头方案对管道进行探测,摄像头方案可以较好的适用于无水环境下的探测,但是在有水环境中由于排水管网水质混浊,能见度低,摄像头水下畸变等因素导致摄像头方案得到的管道图像不清晰,在有水环境下具有一定的局限性。
4、声呐作为水下探测的主要传感器之一,可以较好的在有水环境下进行工作,获得排水管道内部的轮廓以及淤积情况,从而在有水环境下对管道进行探测,但由于管道内部环境狭隘,声呐受到水中杂质的漫反射影响严重,所以得到的点云数据具有较多的噪声。另外,一般采用环扫声呐只能得到管道截面的二维点云模型,因此需要额外的定位传感器对机器人进行定位,从而实现管道缺陷的定位以及构建管道的三维模型。目前一般采用计米器作为定位传感器,计米器在水下稳定性较好,但是更新频率较低,一般只有1-10hz之间,其精度一般为分米级,并且,在有水环境下,多使用漂浮式管道机器人,其在行进过程中,由于机器人的姿态会发生变化,也会影响计米器的定位精度。
5、多传感器数据融合是指多种传感器针对同一个观测目标提供的不同种类的信息通过综合处理,从而达到对观测目标的最优估计。edwardwaltz和jamesllinas对数据融合给出了如下的定义:数据融合是一种综合复杂的的处理过程,通过对多源数据的测量、综合、估计与平均从而得到对观测目标的高精度的最优估计。国外数据融合算法从20世纪70年代开始,最早由美国运用在军事系统上,并且在70年代末,技术文献上开始出现多传感器数据融合的概念。数据融合可以得到比单一传感器更准确更可靠的数据。现在数据融合领域也从松耦合向数据的紧耦合过渡,同时由于机器学习的应用,数据融合的可靠性也得到了加强。但是,不同传感器的更新频率往往不同,传统的基于最小二乘法加权的数据融合算法无法很好的适用于不同频率的传感器相互融合,因此,现有的融合了多传感器数据的排水管道三维模型建立方法,其精度仍有待进一步提高。
技术实现思路
1、针对现有技术的缺陷和改进需求,本发明提供了一种多传感器数据融合的排水管道三维模型构建系统,其目的在于,有效实现多传感器数据的融合,从而提高排水管道三维模型的构建精度。
2、为实现上述目的,按照本发明的一个方面,提供了一种多传感器数据融合的排水管道三维模型构建系统,包括:管道机器人,安装于管道机器人的同步定位装置和数据融合模块;
3、同步定位装置包括:环扫声呐,用于在机器人在排水管道内行进时,实时扫描排水管道内的环形截面点云;惯导传感器,用于实时测量管道机器人行进过程中的姿态信息;以及计米器,用于实时测量管道机器人的行进距离;
4、数据融合模块,用于执行以下步骤,获得排水管道的三维模型:
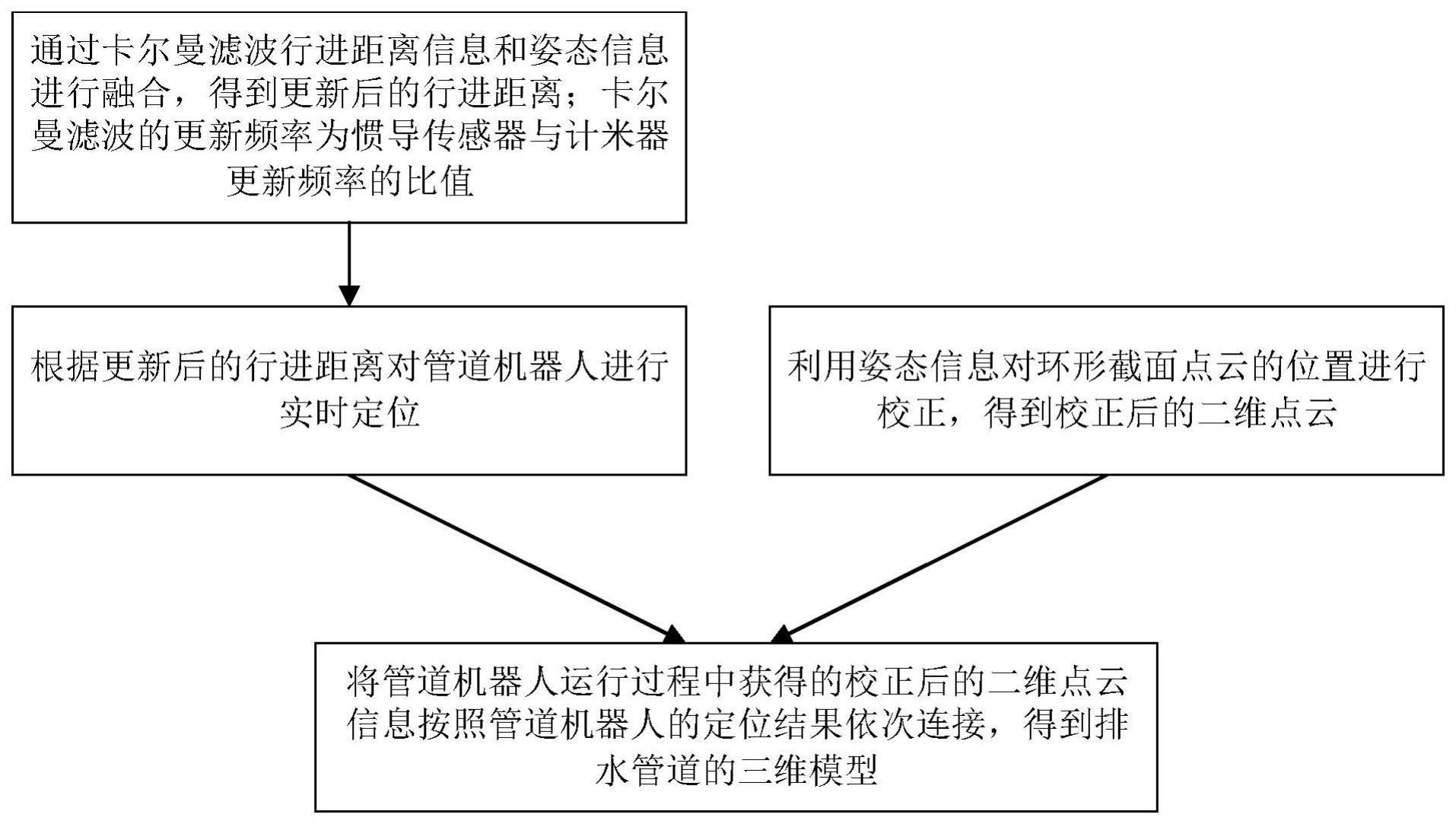
5、通过卡尔曼滤波将行进距离和姿态信息进行融合,得到更新后的行进距离,并由此对管道机器人进行实时定位;卡尔曼滤波的更新频率为惯导传感器与计米器更新频率的比值;
6、利用姿态信息对环形截面点云的位置进行校正,得到校正后的二维点云,并将管道机器人运行过程中获得的校正后的二维点云信息按照管道机器人的定位结果依次连接,得到排水管道的三维模型。
7、进一步地,数据融合模块在通过卡尔曼滤波将行进距离和姿态信息进行融合之后,还包括:对融合结果进行反向滤波,将反向滤波结果作为更新后的行进距离。
8、进一步地,同步定位装置还包括:浑水摄像机,用于在机器人在排水管道内行进时,实时拍摄排水管道的图像信息;
9、并且,数据融合模块还用于对浑水摄像机拍摄的图像信息进行边缘提取,得到图像点云;
10、并且,数据融合模块在利用姿态信息对环形截面点云的位置进行校正之后,还包括:将校正后的环形截面点云与对应的图像点云叠加,将叠加所得的点云作为校正后的二维点云。
11、进一步地,浑水摄像机与环扫声呐安装于管道机器人的本体的同一部位。
12、进一步地,校正后的环形截面点云所对应的图像点云的识别方式,包括以下至少之一:
13、将根据获取自同一时刻的环形截面点云和图像信息得到的校正后的环形截面点云和图像点云识别为对应的信息;
14、对校正后的环形截面点云和图像点云分别做特征提取,将具有相同特征的校正后的环形截面点云和图像点云识别为对应的信息。
15、进一步地,数据融合模块还用于在得到排水管道的三维模型之后,将三维模型与排水管道的gis图进行对比,并依据gis图对三维模型中的错误进行修正。
16、进一步地,环扫声呐安装于管道机器人本体的前端,惯导传感器安装于管道机器人本体内部,计米器安装于管道机器人本体的尾部。
17、按照本发明的又一个方面,提供了一种排水管道缺陷定位方法,包括:
18、获得已训练好的缺陷定位模型;缺陷定位模型为机器学习模型,其以排水管道的三维模型为输入,用于识别排水管道的缺陷,并输出缺陷的位置信息;
19、将排水管道的三维模型输入至缺陷定位模型,得到排水管道中缺陷的位置信息;
20、其中,排水管道的三维模型由本发明提供的上述多传感器数据融合的排水管道三维模型构建系统建立得到。
21、进一步地,本发明提供的排水管道缺陷定位方法,还包括:
22、利用排水管道中缺陷的位置信息,在排水管道的gis图进行缺陷标记,从而对gis图进行更新。
23、按照本发明的又一个方面,提供了一种缺陷定位系统,包括:
24、计算机可读存储介质,用于存储计算机程序;
25、以及处理器,用于读取计算机可读存储介质中的计算机程序,执行本发明提供的上述排水管道缺陷定位方法。
26、总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
27、(1)本发明通过卡尔曼滤波实现了计米器测量得到的行进距离信息和惯导传感器(imu)测量得到的姿态信息之间的融合,由于卡尔曼滤波在测量方差已知的情况下能够从一系列存在测量噪声的数据中,估计动态系统的状态,因此,本发明能够在计米器和惯导传感器频率不同的情况下,有效实现数据融合,利用姿态信息对行进距离的偏移进行修正,得到更为准确的行进距离信息,进而实现对管道机器人的准确定位;本发明进一步利用姿态信息对环形截面点云的位置进行校正,实现了环扫声呐测量得到的环形截面点云与惯导传感器测量得到的姿态信息之间的融合,得到了更为准确的二维点云信息,最终依据管道机器人定位结果对二维点云信息进行拼接得到的三维模型,具有较高的精度。
28、总体而言,本发明有效实现了环扫声呐、计米器以及惯导传感器的数据融合,提高了排水管道三维模型的构建精度。
29、(2)在本发明的优选方案中,在卡尔曼滤波实现计米器和惯导传感器数据融合基础上,会进一步对融合结果进行反相滤波,由此能够在前向卡尔曼滤波结束后,取最后一次的滤波结果为初始值,反向更新状态估计值和协方差矩阵,由前向卡尔曼滤波和反向平滑器的协方差对状态量求加权平均值得到最优估计,同时也能使得到的曲线更加平滑,进一步提高管道机器人的定位精度。
30、(3)在本发明的优选方案中,同时利用浑水摄像机拍摄排水管道的图像信息,并通过边缘提取获得排水管道的图像点云,将校正后的环形截面点云与对应的图像点云叠加,作为校正后的二维点云,由此实现了环扫声呐和浑水摄像机之间的数据融合,由于声呐点云较为稀疏,本发明通过此数据融合,能够提高二维点云的精度,并进一步提高三维模型的构建精度。在其进一步的优选方案中,浑水摄像机与环扫声呐安装于管道机器人的本体的同一部位,能够保证图像点云与环形截面点云对应排水管道的同一位置,进一步提高二维点云的精度。
31、(4)在本发明的优选方案中,基于环形截面点云和图像信息的获取时间以及特征识别校正后的环形截面点云所对应的图像点云,保证点云叠加能够有效提高二维点云的精度。
32、(5)在本发明的优选方案中,在获得排水管道的三维模型后,进一步利用gis图对三维模型中的错误进行修正,能够进一步提高排水管道三维模型的构建精度。
33、(6)本发明提供的排水管道缺陷定位方法,由于其中所依据的排水管道三维模型精度较高,能够准确反映排水管道内部的状态,因此,其缺陷定位精度较高。
34、(7)本发明提供的排水管道缺陷定位方法,在其优选方案中,在识别得到排水管道的缺陷位置后,进一步在排水管道的gis图进行缺陷标记,由此能够使得gis图直观、准确地反映排水管道的实际状态,为排水管道的作业提供明确的依据。
- 还没有人留言评论。精彩留言会获得点赞!