基于混沌麻雀搜索优化模糊PID参数的无人机手势控制方法及控制系统
本发明涉及无人机手势控制,具体是涉及一种基于混沌麻雀搜索优化模糊pid参数的无人机手势控制方法及控制系统。
背景技术:
1、随着计算机技术的发展,用传统方法进行人机交互已经无法满足用户的需求,因此越来越多关于新型人机交互方式的研究涌现。无人机行业的发展迅速,但目前应用于无人机的操控方式仍存在一些弊端。一是传统的控制方式较为单一,几乎只有遥控器和地面站两种;二是通过遥控器操控无人机具有一定的门槛和较长的学习周期。
2、无人机的传统操控方式一般是用rf射频遥控器来实现,人通过遥控的按键和摇杆生成控制指令,然后经过内部射频电路将单一的控制指令发射出去。其通信距离远,但对人员操作要求较高,一般需要进行专业培训,不能满足对于无人机便捷控制的需求。如今的人机交互可以通过:指纹识别、声纹识别、视网膜识别、手势识别、人体表面肌电信号检测等。手势作为交互方式的一种,其具有灵活便捷的特性,且手作为人类交流所使用肢体语言中最常用的器官,其表达的含义丰富且使用自然。
3、目前主流手势控制方式主要有两种:一种是基于运动传感器的手势控制,另一种是基于图像采集的手势控制。基于图像的手势识别一般使用视觉传感器采集手势图像,无需在手上佩戴数据采集设备,手势控制通过裸手即可进行,手势动作表达自然流畅,无佩戴设备的负担。本发明提出将手势识别与无人机飞行控制进行整合的想法,但对于无人机这样一个多模块关联的复杂系统,想要将手势识别技术与无人机控制结合,就需要深入的研究手势信号与无人机飞控系统之间的联系。
技术实现思路
1、发明目的:针对以上缺点,本发明提供一种控制准确度、稳定性高的基于混沌麻雀搜索优化模糊pid参数的无人机手势控制方法。
2、本发明还提供一种基于混沌麻雀搜索优化模糊pid参数的无人机手势控制系统。
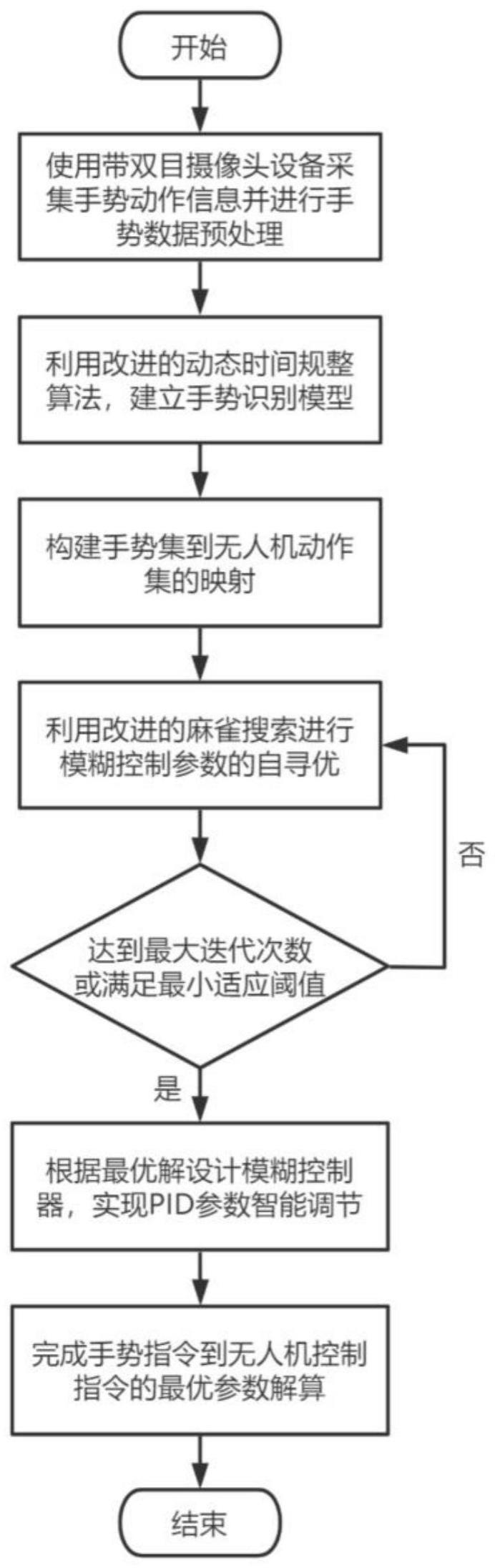
3、技术方案:为解决上述问题,本发明采用一种基于混沌麻雀搜索优化模糊pid参数的无人机手势控制方法,包括以下步骤:
4、(1)设置手势动作指令与无人机控制指令之间的映射关系;
5、(2)以步骤(1)中得到的映射关系为基础,采用反向学习策略改进的麻雀搜索算法进行模糊pid控制参数自寻优,实现pid控制参数的智能调节,得到手势动作指令至无人机控制指令的最优控制参数;
6、(3)获取手势动作,基于动态手势识别模型对手势动作进行解析得到手势动作指令;所述动态手势识别模型通过利用动态时间规整算法并基于视觉图像进行建立;
7、(4)根据得到的手势动作指令控制无人机的运动。
8、进一步的,所述步骤(1)中将手势动作指令中的手势类型以及手势的幅值映射为无人机运动的飞行方向以及运动的目标点距无人机当前位置的距离;
9、所述手势类型包括:向左挥手、向右挥手、向上挥手、向下挥手、顺时针画圈、逆时针画圈,分别对应无人机飞行方向为:向左飞行、向右飞行、向上爬升、向下俯冲、向前飞行、向后飞行;
10、所述手势的幅值包括三个等级:0~m/3为小幅度、m/3~2m/3为中幅度、2m/3~m为大幅度,其中,0~m为最大采集范围,小、中、大幅度对应的目标点与当前位置的距离分别为5m/3、5m、25m/3。
11、进一步的,所述步骤(2)中对无人机位置环的3个通道x、y、z设计3个控制器,设置手势动作所对应的无人机目标位置与当前位置的误差e和误差变化率ec作为模糊控制器的输入量,经过量化因子ke、kec的模糊化处理,转化为模糊控制器的输入e、ec,模糊pid控制器的输出u为pid调节器3个参数的修正量δkp、δki、δkd;根据修正量得到修正后的pid控制参数:
12、
13、其中,k′p、k′i、k′d为修正前的pid控制参数,kp、ki、kd为修正后的pid控制参数。
14、进一步的,所述步骤(2)中通过经验设置pid控制参数的初始值,利用改进的麻雀搜索算法issa进行模糊pid控制器的量化因子ke、kec、比例因子ku的寻优;
15、根据ke、kec、ku的取值范围构建一个三维的目标搜索空间,并使用立方混沌映射和反向学习策略的方法产生麻雀的初始位置来初始化麻雀种群;
16、初始化麻雀种群,麻雀种群包括c个三维个体,首先随机产生一个每维均为-1到1的三维向量y1作为第一个个体,之后使用立方映射公式对y1的每一维进行迭代得到剩余的c-1个个体;之后将立方映射产生的变量值映射到麻雀个体上,利用立方混沌映射得到的麻雀种群记为hp;
17、使用反向学习策略再次对初始化的麻雀种群hp进行处理得到麻雀种群ho,ho中的个体位置为:
18、
19、其中,为第i个麻雀通过立方混沌映射后在目标搜索空间的位置,xlb、xub为目标搜索空间的上、下边界;为第i个麻雀通过反向学习策略后在目标搜索空间的位置;
20、通过反向学习策略再次获得c个初始化个体,合并麻雀种群hp和ho,取出适应度最好的c个麻雀个体组成初始化种群,记为h0;
21、采用黄金正弦的方式对发现者、跟随者和帧察者的位置更新算法进行改进;
22、发现者的位置更新公式为:
23、
24、其中,r1、r2随机取值,且r1∈[0,2π],r2∈[0,π];b为随机数且b∈[0,1],d为符合正态分布的随机数,sr为安全阈值,是一个常数;w为元素全为1的向量;为第i个麻雀第t次迭代时的位置;为第t次迭代时的最优位置;ξ1、ξ2为控制更新步长和方向的参数;
25、跟随者的位置更新公式为:
26、
27、其中,为第t次迭代时的最差位置,c为种群大小,a为一个各元素随机设为1或者-1的矩阵,且a+=at(aat)-1;
28、帧察者的位置更新公式为:
29、
30、其中,fi为当前麻雀个体的适应度值;fbest、fworst分别表示当前迭代数下的全局最优适应度和最差适应度值;β为服从(0,1)的正态分布的随机数;r∈[-1,1]为一个随机数,ε为一个设定的小量常数;
31、初始化种群后,按照麻雀群各自的位置迭代公式更新麻雀群的位置后,计算种群中每个麻雀的适应度大小,即itae值,记为fi;使用优化后的贪婪策略进行位置更新,计算方式如下:
32、
33、其中,fi、fnew分别为位置更新前后的适应度,为更新后的位置,ξ3为随机数,且ξ3∈[0,1];
34、当迭代次数达到最大迭代次数或麻雀群迄今为止搜索到的最优位置满足预定的最小适应度阈值时停止迭代,输出寻优得到的最优解。
35、进一步的,帧察者的数量采用线性递减公式,如下:
36、
37、其中,num为当前侦察者数量,numini为初始侦察者数量,t为当前迭代次数,tmax为最大迭代次数。
38、进一步的,所述步骤(3)中采用双目摄像头获取手势动作,并采集手势数据构建手势数据集,手势数据包括手相对于双目摄像头坐标系的位置信息和速度信息;将手运动过程中运动速度最大值的5%作为手势分割阈值,以分割手势的运动状态和静止状态,对分割后的手势数据分别进行预处理,将其分类存储以建立手势数据集;
39、以手势数据中的食指指尖位置信息作为手势特征,以食指指尖坐标为每个手势创建一个二维特征向量,得到手势特征序列;
40、利用改进的动态时间规整算法dtw进行基于视觉图像的动态手势识别模型的建立,基于动态手势识别模型解析手势动作具体为:对每种手势类型进行n个样本采集得到每种手势类型的手势样本集,将待测手势动作分别与每种手势类型的手势样本集进行dtw运算,分别得到n个累积欧式距离,对得到的n个累积欧式距离,累积欧式距离平均值较小的对应的手势类型为待测手势动作的手势类型。
41、进一步的,所述动态手势识别模型的建立具体为:定义样本手势动作对应的手势特征序列q和待测手势动作对应的手势特征序列c;序列中的每一个点的值为手势特征序列每一帧的数据,手势特征序列q共有n帧,第i帧的数据是qi;手势特征序列c共有m帧,第j帧的数据是cj;
42、q={q1,q2,q3,…,qi,…,qn},c={c1,c2,c3,…,cj,…,cm}
43、将手势特征序列q和手势特征序列c进行时间轴上的对齐;具体通过构造一个n×m的矩阵网格,其中矩阵元素(i,j)表示qi和cj两个点的欧式距离d(qi,cj),寻找一条通过此网格中若干格点的路径,路径通过的格点即为两个序列中进行对齐计算的点,路径w的第k个元素定义为wk=(i,j)k,手势特征序列q和手势特征序列c的映射为:
44、w={w1,w2,…,wk,…,wk}max(m,n)≤k≤m+n-1
45、进行动态规划时,保证规划路径以w1=(1,1)开头且以wk=(m,n)结尾,当wk-1=(a′,b′)时,对于路径的下一个点wk=(a,b)需要满足:
46、0≤(a-a′)≤1,0≤(b-b′)≤1
47、最优规整路径w为所有节点的距离之和最小:
48、
49、其中,k用于对不同长度的规整路径做补偿。
50、本发明还采用一种基于混沌麻雀搜索优化模糊pid参数的无人机手势控制系统,包括映射模块,用于设置手势动作指令与无人机控制指令之间的映射关系;
51、最优参数解算模块,用于以映射关系为基础,采用改进的麻雀搜索算法进行模糊pid控制参数自寻优,实现pid控制参数的智能调节,得到手势动作指令至无人机控制指令的最优控制参数;
52、指令识别模块,用于获取手势动作,基于动态手势识别模型对手势动作进行解析得到手势动作指令;所述动态手势识别模型通过利用动态时间规整算法并基于视觉图像进行建立;
53、执行模块,用于根据得到的手势动作指令控制无人机的运动。
54、有益效果:本发明相对于现有技术,其显著优点是基于混沌麻雀搜索优化的模糊pid控制方法能够以更高的稳定性、更好的准确度完成手势指令控制无人机飞行。
- 还没有人留言评论。精彩留言会获得点赞!