船体识别方法及电子设备与流程
本技术属于船体识别的,尤其涉及船体识别方法及电子设备。
背景技术:
1、现有的基于激光雷达点云进行物体检测的方法主要有两种。
2、一种是点云空间划分成体素栅格,然后直接在体素上利用卷积神经网络提取特征,这种方法的优势是充分利用点云的三维空间几何信息。但是这种方法的计算复杂度非常高,实际应用非常困难。第二种是将点云投影到深度维度产生深度特征图。这种方法可以生产规则和有序的类似深度图像数据,但由于远近不同的物体的透视图的变化,导致物体在深度图像上的尺寸呈现较大范围的变化,导致cnn方法无法检测到远距离的物体,可见,上述两种方案都不太适用于进行物体检测,特别是针对精度要求较高的船体识别场景。
3、基于此,如何提高针对船体识别的精确度是亟待解决的技术问题。
技术实现思路
1、本技术的实施例提供了船体识别方法及电子设备,针对不同的目标区域,通过对点云数据中存在的若干特征维度进行筛选,基于筛选后特征维度对该目标区域内的船体点云进行识别,提高了针对船体识别的精确度。
2、本技术的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本技术的实践而习得。
3、根据本技术实施例的第一方面,提供了一种船体识别方法,所述方法包括:
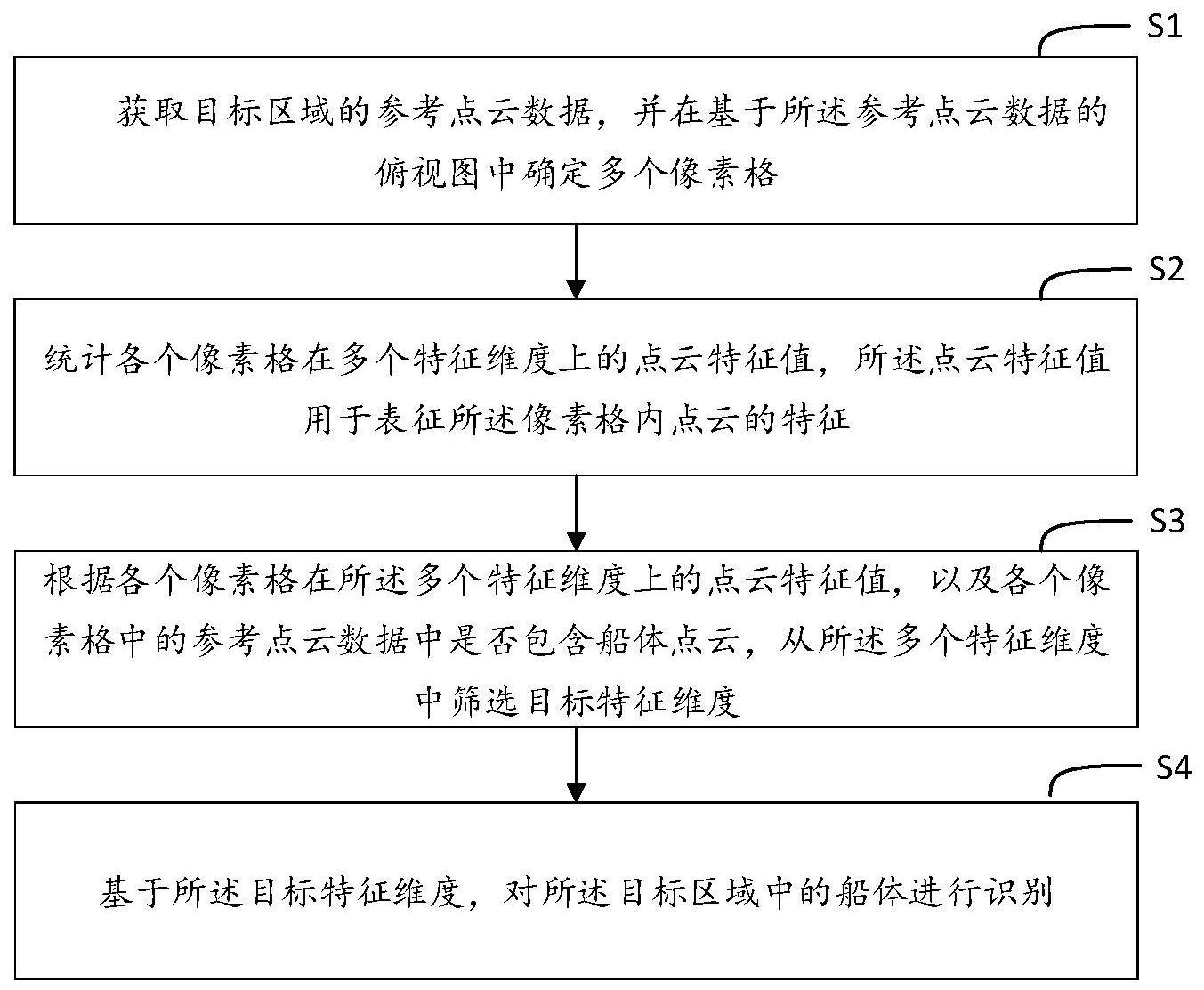
4、获取目标区域的参考点云数据,并在基于所述参考点云数据的俯视图中确定多个像素格;
5、统计各个像素格在多个特征维度上的点云特征值,所述点云特征值用于表征所述像素格内点云的特征;
6、根据各个像素格在所述多个特征维度上的点云特征值,以及各个像素格中的参考点云数据中是否包含船体点云,从所述多个特征维度中筛选目标特征维度;
7、基于所述目标特征维度,对所述目标区域中的船体进行识别。
8、在本技术的一些实施例中,所述根据各个像素格在所述多个特征维度上的点云特征值,以及各个像素格中的参考点云数据中是否包含船体点云,从所述多个特征维度中筛选目标特征维度,包括:
9、将所述多个特征维度定义为候选特征维度;
10、根据各个像素格在所述候选特征维度上的点云特征值,以及各个像素格中的参考点云数据中是否包含船体点云,从所述候选特征维度中确定目标特征维度;
11、如果所述目标特征维度的维度个数超过设定维度个数,则将所述目标特征维度作为新的候选特征维度,并返回迭代执行根据各个像素格在所述候选特征维度上的点云特征值,以及各个像素格中的参考点云数据中是否包含船体点云,从所述候选特征维度中确定目标特征维度的步骤,直至所述目标特征维度的维度个数满足设定维度个数。
12、在本技术的一些实施例中,所述根据各个像素格在所述候选特征维度上的点云特征值,以及各个像素格中的参考点云数据中是否包含船体点云,从所述候选特征维度中确定目标特征维度,包括:
13、根据各个像素格在所述候选特征维度上的点云特征值,确定点云特征矩阵;
14、根据各个像素格中的参考点云数据中是否包含船体点云,对各个像素格进行标记,以确定标记向量;
15、对所述点云特征矩阵和所述标记向量进行拟合,得到各个特征维度的回归系数,所述回归系数的绝对值用于表征对应特征维度对判断像素格中的参考点云数据中是否包含船体点云的贡献程度;
16、基于各个特征维度的回归系数,从所述候选特征维度中确定目标特征维度。
17、在本技术的一些实施例中,所述基于各个特征维度的回归系数,从所述候选特征维度中确定目标特征维度,包括:
18、基于所述多个特征维度的维度个数,确定目标特征维度的保留个数;
19、按照所述目标特征维度的保留个数,基于各个特征维度的回归系数,从所述候选特征维度中确定目标特征维度。
20、在本技术的一些实施例中,所述基于所述多个特征维度的维度个数,确定目标特征维度的保留个数,包括:
21、如果所述多个特征维度的维度个数小于等于维度个数阈值,则按照设定的特征维度剔除个数,确定目标特征维度的保留个数;
22、如果所述多个特征维度的维度个数大于维度个数阈值,则通过指数衰减的方式计算特征维度剔除个数,按照计算得到的特征维度剔除个数,确定目标特征维度的保留个数。
23、在本技术的一些实施例中,所述按照所述目标特征维度的保留个数,基于各个特征维度的回归系数,从所述候选特征维度中确定目标特征维度,包括:
24、按照从大到小的顺序,对各个特征维度的回归系数的绝对值进行排序;
25、将排序靠前的所述保留个数的候选特征维度确定为目标特征维度。
26、在本技术的一些实施例中,所述基于所述目标特征维度,对所述目标区域中的船体进行识别,包括:
27、获取目标区域的待识别点云数据;
28、基于所述待识别点云数据和所述设定维度个数的的目标特征维度,对船体进行识别。
29、在本技术的一些实施例中,所述目标特征维度的维度个数为三个,所述基于所述待识别点云数据和所述目标特征维度,对船体进行识别,包括:
30、获取所述待识别点云数据对应的各个像素格在三个所述目标特征维度上的点云特征值;
31、将所述在三个所述目标特征维度上的点云特征值对应转换为rgb三通道颜色信息;
32、基于所述rgb三通道颜色信息,生成待识别图片,并通过所述待识别图片识别所述目标区域的船体。
33、根据本技术实施例的第二方面,提供了一种船体识别方法,所述方法包括:
34、根据上述第一方面任一项所述的方法确定多组目标特征维度,其中,每一组目标特征维度中包括至少一个目标特征维度;
35、基于验证数据验证各组目标特征维度,并计算各组目标特征维度对应的均方根误差;
36、基于所述均方根误差最小的一组目标特征维度,对所述目标区域中的船体进行识别。
37、根据本技术实施例的第三方面,提供了一种船体识别装置,应用于上述任一项实施例所述的方法,所述装置包括:
38、获取单元,用于获取目标区域的参考点云数据和目标区域的待识别点云数据;
39、数据处理单元,用于统计各个像素格在多个特征维度上的点云特征值,所述点云特征值用于表征所述像素格内点云的特征;
40、迭代单元,用于根据各个像素格在所述多个特征维度上的点云特征值,以及各个像素格中的参考点云数据中是否包含船体点云,从所述多个特征维度中筛选目标特征维度;
41、识别单元,用于基于所述目标特征维度,对所述目标区域中的船体进行识别。
42、根据本技术实施例的第四方面,提供了一种船体识别装置,应用于上述任一项权利要求所述的方法,所述装置包括:
43、确定单元,用于根据上述任一项实施例所述的方法确定多组目标特征维度;
44、分析单元,基于验证数据验证各组目标特征维度,并计算各组目标特征维度对应的均方根误差;
45、识别单元,用于基于所述均方根误差最小的一组目标特征维度,对所述目标区域中的船体进行识别。
46、根据本技术实施例的第五方面,提供了一种船体识别电子设备,所述电子设备包括一个或多个处理器和一个或多个存储器,所述一个或多个存储器中存储有至少一条程序代码,所述至少一条程序代码由所述一个或多个处理器加载并执行以实现上述任一实施例所述的方法。
47、通过本技术所提出的一些实施例方案,通过各个像素格在所述多个特征维度上的点云特征值,以及各个像素格中的参考点云数据中是否包含船体点云,对点云数据所对应像素格中固有的特征维度进行筛选,能够筛选出与船体识别准确性相关的目标特征维度,使得在对目标区域内的船体进行识别的过程中,可以降低人为主观判断对对船体识别的影响,从而在一定程度上提高了船体识别的准确性。
48、上述第二方面至第五方面各个实施例的有益效果,可以参考上述第一方面及第一方面各个实施例的有益效果,这里不再赘述。
49、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!