一种基于灰度特征的瑕疵识别方法与流程
本发明涉及图像处理,特别涉及一种基于灰度特征的瑕疵识别方法。
背景技术:
1、工业上,对木材、钢铁、纺织物等原材料的瑕疵检测,往往分为两个步骤:“处理”和“识别”。由于木材的纹理、钢铁的光泽和纺织物的粗糙等,使得在原图上直接进行“瑕疵识别”的效果极其不理想,所以通常需要“处理”的操作,过滤掉这些材料本身的特性带来的干扰,同时保留瑕疵信息以便进行“识别”的操作。
2、对于计算机而言,一个点是否为瑕疵,主要看其和周围背景的灰度值差异。但一张较大的实拍图像,其背景灰度值往往是不均匀的,所以先选择合适的带通滤波对其进行“处理”操作,将背景的灰度值整理为较为均匀,同时突出瑕疵点。这时,对于钢铁、陶瓷等较为光滑、统一的材料而言,设置好合适的阈值,直接使用阈值分割便可找到瑕疵点。但是,纺织物由于其纤维分布不均匀、表面粗糙、厚度不统一等特点,经过带通滤波或者其他“处理”方式处理后,得到的图像依然会有许多噪点,这些噪点的灰度值与部分种类的瑕疵点差别不大,所以极大地干扰了瑕疵识别的过程,导致图像中瑕疵的识别结果不准确。
技术实现思路
1、针对上述技术问题,本发明采用的技术方案为:
2、一种基于灰度特征的瑕疵识别方法,该方法包括如下步骤:
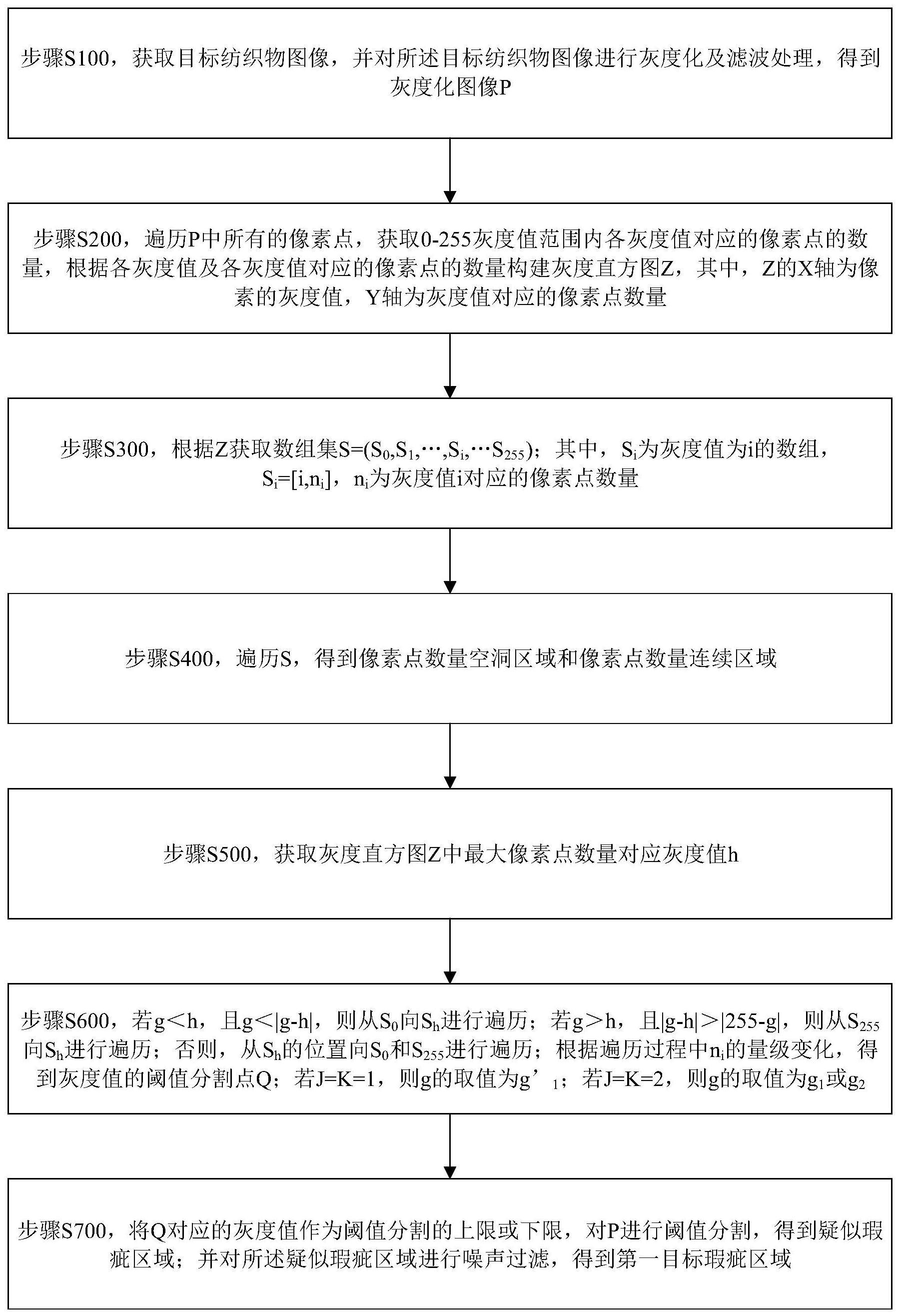
3、步骤s100,获取目标纺织物图像,并对所述目标纺织物图像进行灰度化及滤波处理,得到灰度化图像p;
4、步骤s200,遍历p中所有的像素点,获取0-255灰度值范围内各灰度值对应的像素点的数量,根据各灰度值及各灰度值对应的像素点的数量构建灰度直方图z,其中,z的x轴为像素的灰度值,y轴为灰度值对应的像素点数量;
5、步骤s300,根据z获取数组集s=(s0,s1,…,si,…s255);其中,si为灰度值为i的数组,si=[i,ni],ni为灰度值i对应的像素点数量;
6、步骤s400,遍历s,得到像素点数量空洞区域和像素点数量连续区域;如果j=k=1,则将像素点数量空洞区域与像素点数量连续区域交界处的灰度值记为g’1;如果j=k=2,则将第一像素点数量空洞区域与第一像素点数量连续区域交界处的灰度值记为g1,将第二像素点数量空洞区域与第二像素点数量连续区域交界处的灰度值记为g2,j为得到的像素点数量空洞区域的数量,k为得到的像素点数量连续区域的数量,所述第一像素点数量空洞区域对应的灰度值均值小于所述第二像素点数量空洞区域对应的灰度值均值,所述第一像素点数量连续区域对应的灰度值均值小于所述第二像素点数量连续区域对应的灰度值均值;
7、步骤s500,获取灰度直方图z中最大像素点数量对应灰度值h;
8、步骤s600,若g<h,且g<|g-h|,则从s0向sh进行遍历;若g>h,且|g-h|>|255-g|,则从s255向sh进行遍历;否则,从sh的位置向s0和s255进行遍历;根据遍历过程中ni的量级变化,得到灰度值的阈值分割点q;若j=k=1,则g的取值为g’1;若j=k=2,则g的取值为g1或g2;
9、步骤s700,将q对应的灰度值作为阈值分割的上限或下限,对p进行阈值分割,得到疑似瑕疵区域;并对所述疑似瑕疵区域进行噪声过滤,得到第一目标瑕疵区域。
10、可选的,遍历s,得到像素点数量空洞区域,包括:
11、步骤s401,以灰度值0-255的顺序遍历s,记录第一个像素点数量为0的灰度值d1;
12、步骤s402,继续遍历d1后的灰度值对应的像素点数量,忽略像素点数量为0的灰度值,记录d1后第一个像素点数量不为0且后面的10个灰度值对应的像素点数量均不为0的灰度值d2;
13、步骤s403,将d1到d2之间的区域作为像素点数量空洞区域。
14、可选的,遍历s,得到像素点数量连续区域,包括:
15、步骤s410,以灰度值0-255的顺序遍历s,记录第一个像素点数量不为0的灰度值d3;
16、步骤s420,继续遍历d3后的灰度值对应的像素点数量,忽略像素点数量不为0的灰度值,记录d3后第一个像素点数量为0且后面的10个灰度值中存在灰度值对应的像素点数量为0的灰度值d4;
17、步骤s430,将d3到d4之间的区域作为像素点数量连续区域。
18、可选的,所述步骤s600包括:
19、步骤s601,从s0向sh进行遍历,记录遍历过程中ni及ni-1的量级,若ni的量级与ni-1的量级的比值大于预设值,记录ni的灰度值为a;
20、步骤s602,继续遍历a后的十个灰度值对应的像素点数量,若存在相邻两个灰度值的像素点数量的量级的比值大于预设值,则记录所述相邻两个灰度值中的后一灰度值为q。
21、可选的,所述步骤s600还包括:
22、步骤s611,从s255向sh进行遍历,记录遍历过程中ni及ni+1的量级,若ni的量级与ni+1的量级的比值大于预设值,记录ni的灰度值为a;
23、步骤s612,继续遍历a后的十个灰度值对应的像素点数量,若存在相邻两个灰度值的像素点数量的量级的比值大于预设值,则记录所述相邻两个灰度值中的后一灰度值为q。
24、可选的,所述步骤s600还包括:
25、步骤s621,从sh向s0进行遍历,记录遍历过程中ni及ni-1的量级,若ni的量级与ni-1的量级的比值大于预设值且ni后的十个灰度值中存在相邻两个灰度值的像素点数量的量级的比值大于预设值,记录ni的灰度值为q;
26、步骤s623,从sh向s255进行遍历,记录遍历过程中ni及ni+1的量级,若ni的量级与ni+1的量级的比值大于预设值且ni后的十个灰度值中存在相邻两个灰度值的像素点数量的量级的比值大于预设值,记录ni的灰度值为q。
27、可选的,所述步骤s700包括:
28、步骤s710,根据阈值分割的上限或下限对p进行阈值分割,得到若干瑕疵区域;
29、步骤s720,遍历所有瑕疵区域,将面积小于预设面积的瑕疵区域删除,得到所述第一目标瑕疵区域。
30、可选的,所述方法还包括如下步骤:
31、步骤s800,对所述目标纺织物图像图像进行灰度化处理,得到灰度化图像p1,并求取p1的灰度方差dx1;
32、步骤s900,对p1进行滤波处理,得到灰度化图像p2,并求取p2的灰度方差dx2;
33、步骤s1000,若dx1-dx2>dx0,将p1中各像素点的灰度值减去对应于p2中的像素点的灰度值,得到p1与p2中各像素点的差值;其中,dx0为预设的灰度方差阈值。
34、步骤s1100,将p1中差值大于预设差值阈值的像素点构成的每个连通区域标记为疑似第二目标瑕疵区域;
35、步骤s1200,若疑似第二目标区域的面积大于j*up1,将该疑似第二目标区域标记为第二目标区域;其中,j为预设的比例系数,0<j<1,up1为p1的面积。
36、可选的,所述j的取值范围为5%到10%。
37、可选的,步骤s100中的滤波处理包括如下步骤:
38、步骤s110,将e1与e2作差,生成e3;其中,e1和e2均为预设的高斯滤波核,且e1与e2的尺度相差为1,e3为通过e1和e2生成的滤波核;
39、步骤s120,通过e3对灰度化的图像进行滤波处理,得到p。
40、本发明至少具有以下有益效果:
41、本发明的基于灰度特征的瑕疵识别方法,根据灰度化图像p的灰度值生成灰度直方图,根据像素点空洞区域和像素点连续区域的交界处以及像素点数量最多的灰度值,确定最佳的遍历路径,此方式能够以最短的遍历路径来寻找阈值分割点,从而大大的提高了阈值分割点的确定效率;同时,利用瑕疵灰度值突变的特性,将该特性表征为灰度值对应的像素点的量级突变,根据量级的突变值,来确定具体的阈值分割点对应的灰度值,避免了个别灰度噪声的干扰,提高了瑕疵识别的准确性。
- 还没有人留言评论。精彩留言会获得点赞!