一种应用于产品分拣的智能检测方法及装置
本发明涉及机器视觉,具体涉及一种应用于产品分拣的智能检测方法。
背景技术:
1、产品分拣是工业自动化生产中的一项重要生产环节,传统的人工分拣或示教工业机器人分拣无法适应现代工业对劳动生产率和生产过程自动化水平的需求,这将直接影响食品加工企业的经济效益和产品质量,因此市场迫切需要开发一套自动、智能检测系统,该系统对于提高企业自动化程度、提升企业生产效率、提高产品质量具有现实意义,将机器视觉技术与工业机器人相结合可使分拣作业具有更高的柔性和可靠性。
2、卢振利等从烟盒的特征检测入手,利用matlab工具识别真伪香烟,并通过控制机器人手抓对香烟进行分拣。周军等基于机器视觉技术研究出一种针对核桃仁的颜色和完整度来进行新疆核桃仁分级的方法。tuong phuoc tho等根据颜色、形状等特征对番茄进行分级并识别定位,实现番茄的自动分拣。然而这些智能识别技术应用时存在一些限制,例如灵活性差、成本高、高功耗、准确率低等等。
3、本发明了一种应用于产品分拣的智能检测方法,实现了全自动流水线,利用边缘检测及模型匹配对用工业相机传入的装配流水线上的图像进行处理可以实现对产品的外观优劣检测,并对产品进行准确的分类解决现有技术中存在的计算量太大,耗时长、速度特别慢、实时性较差,匹配时间太长,分拣准确率低的技术问题。
技术实现思路
1、有鉴于此,有必要提供一种应用于产品分拣的智能检测方法,用以解决现有技术中存在的计算量太大,耗时长、速度特别慢、实时性较差,匹配时间太长,分拣准确率低的技术问题。
2、本发明提供了一种应用于产品分拣的智能检测方法,包括:
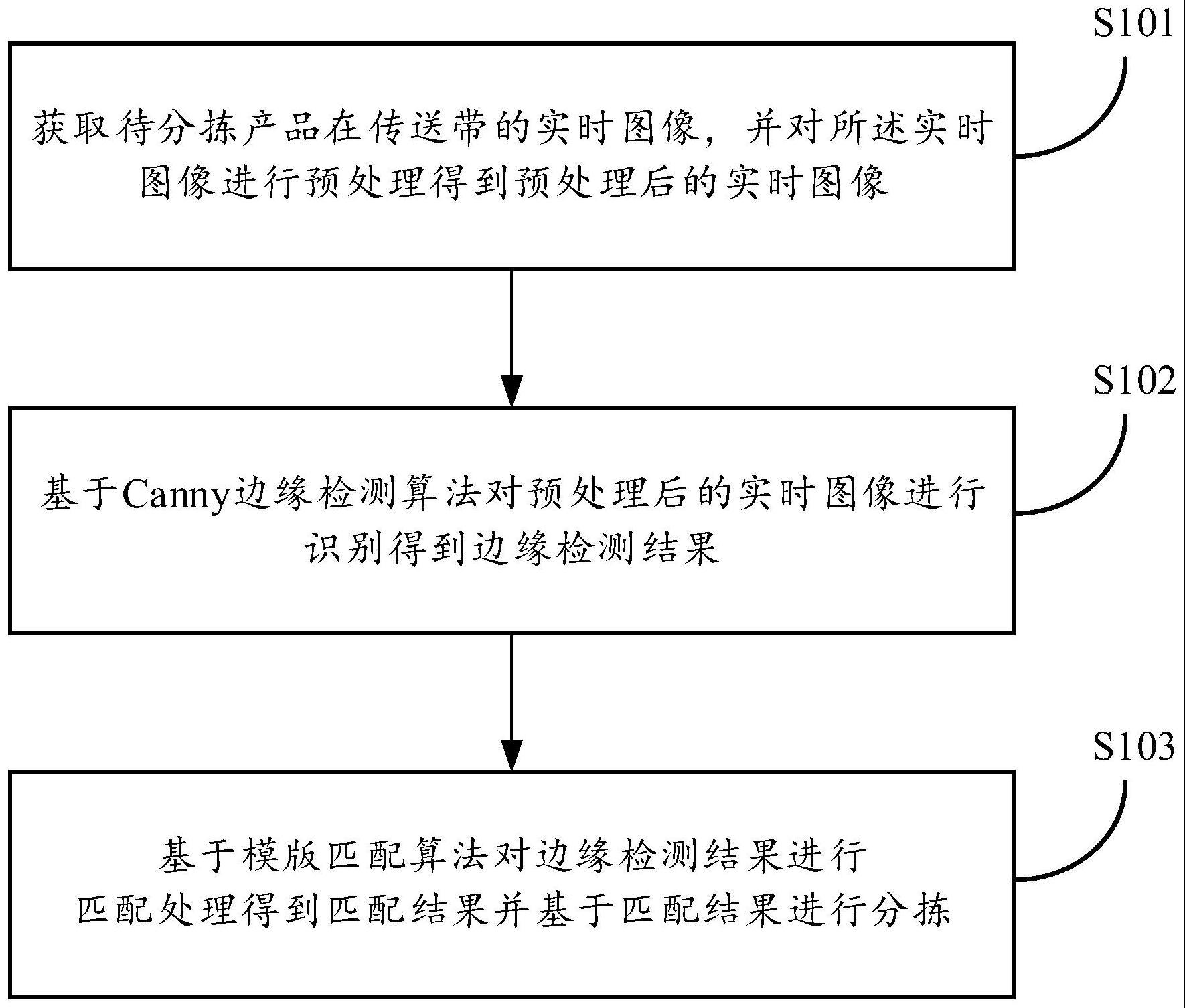
3、获取待分拣产品在传送带的实时图像,并对所述实时图像进行预处理得到预处理后的实时图像;
4、基于canny边缘检测算法对预处理后的实时图像进行识别得到边缘检测结果;
5、基于模版匹配算法对边缘检测结果进行匹配处理得到匹配结果并基于匹配结果进行分拣。
6、在一些可能实现的方式中,对所述实时图像进行预处理得到预处理后的实时图像,包括:
7、通过参数为5x5的高斯卷积核的高斯滤波器对图像进行降噪平滑处理得到预处理后的实时图像。
8、在一些可能实现的方式中,基于canny边缘检测算法对预处理后的实时图像进行识别得到边缘检测结果,包括:
9、基于canny边缘检测算法对所述预处理后的实时图像的中每个像素点的梯度幅值和梯度方向进行计算确定预处理后的实时图像的中每个像素点梯度值和梯度方向;
10、基于canny边缘检测算法对所述预处理后的实时图像的中每个像素点梯度值进行非极大值抑制输出非极大值抑制后的图像;
11、基于canny边缘检测算法对所述非极大值抑制后的图像进行双阈值检测得到图像边缘数据;
12、基于所述图像边缘检测数据进行边界寻迹处理得到边缘检测结果。
13、在一些可能实现的方式中,基于canny边缘检测算法对预处理后的实时图像的中每个像素点的梯度幅值和梯度方向进行计算确定预处理后的实时图像的中每个像素点梯度值和梯度方向,包括:
14、基于梯度值计算公式和梯度方向角计算公式计算预处理后的实时图像的中每个像素点梯度值和梯度方向。
15、在一些可能实现的方式中,基于canny边缘检测算法对预处理后的实时图像的中每个像素点梯度值进行非极大值抑制输出非极大值抑制后的图像,包括:
16、将实时图像的中每个像素点梯度值与相邻像素点的梯度值进行对比;
17、当该像素点的梯度值与相邻像素点的梯度值相比最大时,将该像素点作为边缘点保留,反之抑制该像素点;
18、基于非极大值抑制处理后保留的边缘点输出非极大值抑制后的图像。
19、在一些可能实现的方式中,基于canny边缘检测算法对非极大值抑制后的图像进行双阈值检测得到图像边缘数据,包括:
20、通过最大熵算法来获得高门限阈值并据此求出低门限阈值;
21、根据高门限阈值和低门限阈值对非极大值抑制后的图像进行双阈值检测,确定图像数据的强边缘点和弱边缘点;
22、基于图像数据的强边缘点和弱边缘点输出图像边缘数据;
23、将所述梯度值大于高门限阈值边缘点划分为强边缘点,梯度值小于高门限阈值大于低门限阈值的边缘点划分为弱边缘点,梯度值小于低门限阈值的边缘点进行抑制。
24、在一些可能实现的方式中,基于图像边缘检测数据进行边界寻迹处理得到边缘检测结果,包括:
25、基于图像边缘数据将强边缘点作一条细线作为边界,对细线周围检测边缘的有效低灰度包围起来进行连接,形成低灰度混合连接图像边缘;
26、对低灰度混合连接图像边缘进行二值化处理,获取二值化处理后的低灰混合连接图像边缘的高低灰度面积或周长,输出边缘检测结果。
27、在一些可能实现的方式中,所述基于模版匹配算法对边缘检测结果进行匹配处理得到匹配结果,包括:
28、获取待分拣产品的标准信息模版;
29、基于标准信息模版对所述边缘检测结果进行遍历,直到遍历整个标准信息模块区域为止获取匹配结果;
30、预先提取的单个产品标准信息模板与边缘检测的结果图像中所选模板具有最大相似性的特定区域之间的点匹配步骤为:选择任意一块预先提取的单个产品标准信息模板;
31、提取位于预先提取的单个产品标准信息模板中的所有特征点;
32、提取边缘检测的结果中的图像块中的所有特征点,使用蛮力匹配算法来匹配这两组特征点;
33、选择描述符的汉明距离较小的那些特征点对作为最终匹配结果,循环整个过程,直到遍历所有模板。
34、在一些可能实现的方式中,所述遍历整个标准信息模块区域为止获取匹配结果,包括:
35、选择所述准信息模板中的某个特征点为选定点;
36、计算每个选定点与边缘检测的结果中对应点之间的描述符汉明距离;
37、当所述选定点与边缘检测的结果中对应点之间的描述符汉明距离在预设第一阈值范围时,所述选定点与边缘检测的结果中对应点为高匹配度点;
38、当所述选定点与边缘检测的结果中对应点之间的描述符汉明距离不在预设第一阈值范围时,所述选定点与边缘检测的结果中对应点为低匹配度点;
39、基于所述对应点中高匹配度点的比例得到匹配结果。
40、在一些可能实现的方式中,所述基于匹配结果进行分拣包括:
41、当匹配结果大于预设第二阈值时,该产品为合格产品;
42、当匹配结果小于预设第二阈值时,该产品为不合格产品。
43、与现有技术相比,采用上述实施例的有益效果是:本发明通过获取待分拣产品在传送带的实时图像,并对所述实时图像进行预处理得到预处理后的实时图像;基于canny边缘检测算法对预处理后的实时图像进行识别得到边缘检测结果;基于模版匹配算法对边缘检测结果进行匹配处理得到匹配结果并基于匹配结果进行分拣。通过canny边缘检测算法对所述实时图像进行处理得到边缘检测结果;最后基于所述模版匹配算法对所述边缘检测结果进行匹配,得到匹配结果,基于所述匹配结果进行分拣,解决现有技术中存在的实时性较差,分拣准确率低的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!