一种自动驾驶商用车横向定位方法
本发明涉及计算机视觉领域,具体是一种基于单应性变换的自动驾驶商用车横向定位方法。
背景技术:
1、随着汽车智能化的不断发展,高精度定位显得愈来愈重要。实现智能汽车的高精度定位,是获取道路交通状况,感知道路环境的前提,这对智能汽车路径规划与各系统的决策有着巨大的影响。对于在道路上行驶的自动驾驶车辆,首要也是最重要的任务之一是车辆的定位问题。为此,车辆需要能够考虑来自多个传感器的信息,并将其与来自道路地图的数据进行融合。车道级定位问题可以归纳为三个主要模块,首先是要推断车辆当前行驶的道路,事实上,全球卫星导航系统本身不够精确,无法推断出这些信息,因此需要一个精细化定位的步骤,第二步是估计车辆在其车道上的位置,最后是评估车辆当前行驶的车道,最后两个部分对于安全驾驶是十分必要的。对于智能汽车上的某些应用,仅知道车辆行驶的道路是远远不够的这些系统必须被告知主车道在道路中的位置以及车辆在当前行驶车道中的具体位置,以提供足够的机动指令并保持车辆的安全。因此,自动驾驶车辆应用需要更精确的定位,这可以通过估计车辆在自车车道中的横向和纵向位置来实现。
2、对于车道保持,车道偏离预警,自动巡航,自动驾驶等智能车系统来说,系统判断决策的精确度对于汽车横向定位的精准度要求较高,在实践中,可以通过根据一些视觉特征(如车道标记或交通标志)定位车辆来实现自主车辆的定位,这些视觉地标可以使用车载传感器检测。目前,汽车当前行驶车道内的横向定位可以通过许多方法来实现,然而大多都基于预先采集的高精地图、gps或者高成本的激光雷达,惯导等,在某些场景或低成本要求下无法实现。而低成本的方案通常仅使用相机,利用传统方法如边缘检测+色彩阈值通过hough变换检测车道线,通过斜率筛选直线,使用一般最小二乘法拟合出车道线,最后通过几何模型或者变换矩阵计算完成横向定位,一方面传统的车道线检测方法受噪声、光照的影响较大,一般最小二乘法拟合的结果不能满足高精度定位的要求,导致定位准确度不高,另一方面汽车在行驶时,由于车辆振动或地面凹凸不平的影响,导致一次标定的变换矩阵计算出的定位结果精度较低,因此相机的外参需要实时标定,不能使用一次标定的变换矩阵进行计算。
技术实现思路
1、为了解决现有技术中存在的不足,本发明提出一种自动驾驶商用车横向定位方法,本方法基于深度学习车道线检测、tukey加权最小二乘拟合,实时单应性变换的自动驾驶商用车高精度横向定位方法。该方法以高鲁棒性的深度学习车道线检测为基础,使用tukey加权最小二乘法拟合得到的精确车道线,通过基于高斯采样最大似然求解得到的相机与采样地平面之间的单应性变换矩阵,计算车辆在最优采样平面的横向定位结果,最后利用尺度s恢复车辆在真实地平面的横向定位结果,有效减少传统方法所带来的车道线检测误差以及由于车辆振动和地面凹凸不平导致的定位误差,实现高精度的自车道横向定位。
2、为实现上述目的,本发明所采用的技术方案如下:
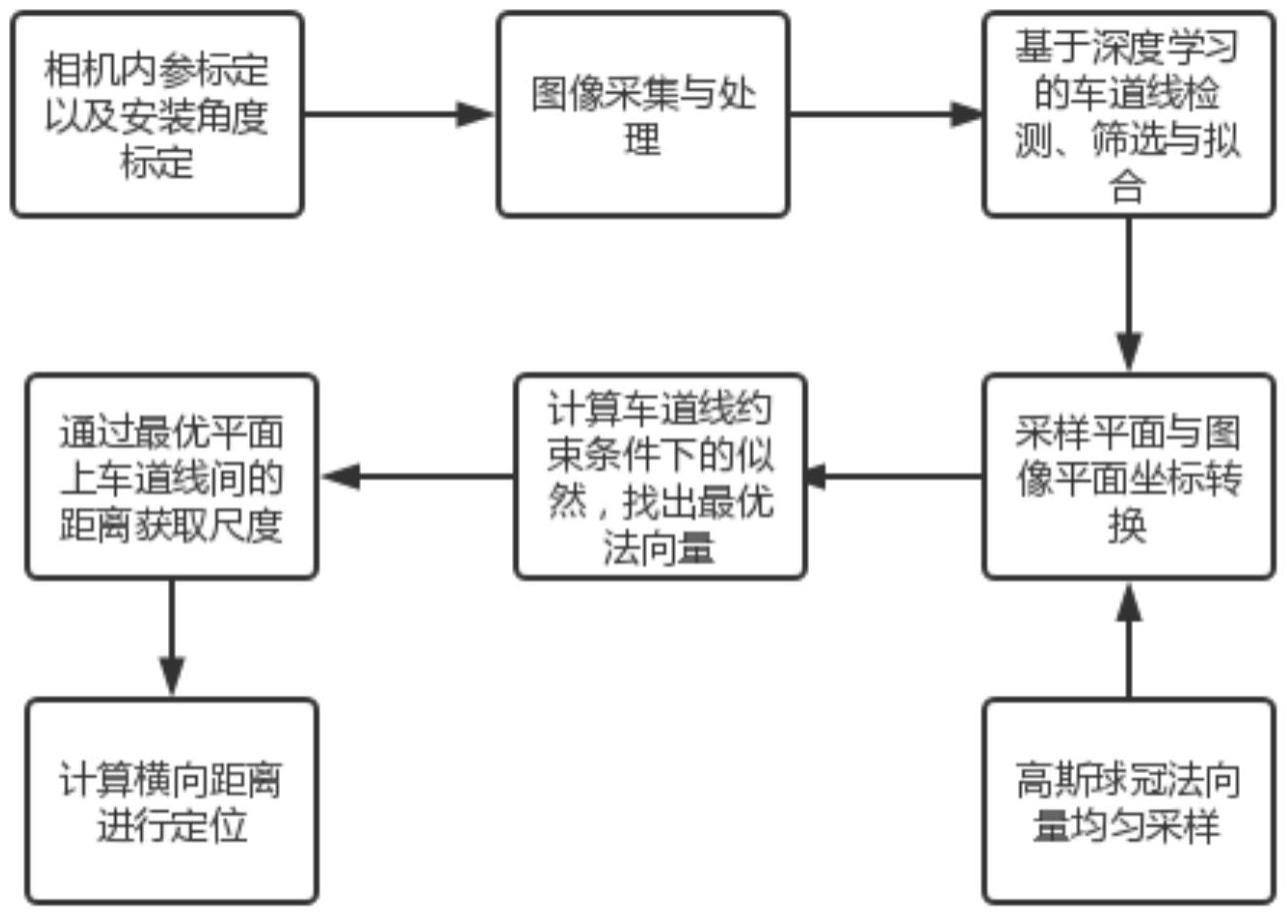
3、一种自动驾驶商用车横向定位方法,包括如下步骤:
4、s1、相机内参矩阵标定以及相机安装角度标定;
5、s2、利用完成相机内参矩阵以及安装角度标定后的单目相机对汽车行驶时的前视图像进行采集,并对所采集的图像进行处理;
6、基于深度学习对图像进行车道线检测,并获取并筛选当前车辆所在车道线上的点坐标;对所筛选出的当前车道线点坐标进行tukey加权最小二乘的直线拟合,剔除误检测的车道点;
7、s3、基于s2中筛选出的当前车道线点坐标,通过在高斯球冠进行平面法线均匀采样,结合标定得到的相机内参可以计算出图像平面与采样平面间的单应性矩阵;根据车道线约束计算最大似然,找出最优平面法向量;
8、s4、在最大似然对应的平面进行横向定位,并通过尺度s恢复真实定位结果。
9、进一步,s2中车道线检测方法如下:
10、将处理后的图像作为深度学习网络的输入,利用深度学习网络检测出车道线在图像中的坐标点,在深度学习网络的输出结果中预先对坐标点按车道线标记分类,获取当前车辆所在车道线上的坐标点。
11、进一步,对所获取的当前车辆所在车道线上的坐标点进行筛选的方法如下:
12、对于当前车辆所在车道线上的坐标点,先按照坐标点到当前车辆的距离由远及近进行排序,选取坐标数组中靠近当前车辆的50%的坐标点用于横向定位。
13、进一步,对筛选出的近场点使用tukey加权最小二乘法进行拟合,tukey加权最小二乘的步骤为:
14、步骤(1)、设置所有点的权重ω=1,进行标准最小二乘法拟合出一条近似直线;
15、步骤(2)、设置一个距离阈值τ,计算所有点到步骤(1)中直线的距离d,若d<t,则该点的权重为若d>τ,则该点的权重为ω=0;
16、步骤(3)、对于步骤(2)中所有带权重的点进行加权最小二乘拟合出一条新的直线,重复以上步骤,直至通过多次迭代拟合得到最精确的直线;
17、
18、根据拟合出的直线选取合适的起点与步长重新计算近场点的坐标,并基于此计算出图像上当前车道的中心线与图像中线的夹角β,以此作为车辆在行驶时的实际偏离角。
19、进一步,s3中找出最优平面法向量的方法如下:
20、筛选出图像中的车道线坐标点后,在高斯球冠上进行归一化平面法线均匀采样,得到采样法线之后,通过采样角θ和计算得到相机坐标系和采样平面坐标系之间的旋转矩阵,以采样法向量端点坐标计算平移矩阵,完成上述步骤后,结合标定得到的相机内参可以计算出图像平面与采样平面间的单应性矩阵,将图像上的车道线坐标点转换至采样平面上,之后,计算每一个采样平面上两个平面约束即平行约束和角度约束的联合似然,最大联合似然即对应着最优平面法向量。
21、进一步,s4中进行横向定位的方法为:
22、找出最优平面法向量之后,在最优平面上计算步骤s3中拟合出的两条平行直线的距离d*;
23、尺度s表示为:
24、
25、其中,d0为路段左右两侧车道线的真实距离;
26、使用步骤s3中在最优平面内拟合得到的车道线方程,计算平面坐标系原点(0,0)与所拟合出的车道线之间的距离,再利用尺度信息恢复,即得到相机距离真实左右车道线的距离。
27、
28、其中,a、b、c分别为拟合出的车道线方程参数,x、y分别为相机中心投影至地平面的坐标点。
29、进一步,使用棋盘格法标定相机的内参矩阵。
30、进一步,相机内参矩阵标定的方法为:
31、将棋盘格平放在地面上,棋盘格平面以检测得到的棋盘格角点为原点,通过张正友标定法多次测量,计算出相机平面与棋盘格平面间的内参矩阵k,表示为:
32、
33、其中,fx为x轴方向相机焦距的长度,fy为y轴方向相机焦距的长度,u0为图像实际主点的横像素坐标,v0为图像实际主点的纵像素坐标。
34、进一步,所述安装角度的标定方法为:对于在车辆上固定安装的相机,使用水平仪标定得到相机的安装角度α。
35、进一步,s2中图像处理包括:视频取帧,去畸变,剪裁,图像灰度化,图像格式转化的处理。
36、本发明的有益效果:
37、1、为保证车道线检测的鲁棒性,使用基于深度学习的车道线检测算法,通过网络训练后可以应用于各类场景,相比于传统的检测方法,适用性更强,检测精度也更高。
38、2、将求解最优单应性问题转化为求解高斯采样最大似然问题,有效降低了由于车辆振动以及地面凹凸不平导致的定位误差。
39、3、使用tukey加权最小二乘的拟合方法,有效剔除误检测的车道坐标点,精确拟合出检测到的车道线,有效降低了由于车道线点误检测而造成的定位误差。
- 还没有人留言评论。精彩留言会获得点赞!